

Данель в.В.
2009 г.
Содержание 2
Плоская система сходящихся сил. 3
1.1. Сила – вектор. 3
1.2. Сложение двух сил, сходящихся в одной точке.
1.3. Сложение нескольких сил, сходящихся в одной точке.
1.4. Равновесие системы сходящихся сил.
Плоская система произвольно расположенных сил.
2.1. Момент силы относительно точки.
2.2. Момент пары сил.
2.3. Главный вектор. Главный момент.
2.4. Влияние изменения центра привидения.
2.5. Равновесие твёрдого тела под действием плоской системы сил.
2.6. Типы опор.
2.7. Определение опорных реакций для простейших балок.
Анализ расчётных схем.
3.1. Переход от реальных конструкций к расчётным схемам.
3.2. Узлы стержневых систем.
3.3. Чем опасна мгновенная изменяемость.
3.5. Принципы образования мгновенно и геометрически неизменяемых систем.
3.6. Степени свободы. Статическая определимость.
Виды стержневых систем.
4.1. Балки.
4.2. Рамы.
4.3. Стержни.
4.3.1.Элементы ферм.
4.3.2.Работа ферм.
Аналитические методы определения усилий в плоских статически определимых фермах. Рекомендации по конструированию.
5.1. Метод вырезания узлов.
5.2. Метод моментных точек.
5.3. Метод проекций.
5.4. Рекомендации по конструированию ферм. Шпренгель
ные фермы.
Понятие о предельных состояниях. 50
Нормативные и расчётные сопротивления. 51
Коэффициенты ответственности и условий работы 51
Предельные гибкости стержней 55
Расчётные длины стержней. 55
Подбор сечений элементов ферм. 57
Подбор сечения растянутых элементов. 57
Подбор сечения сжатых элементов. 59
Сортамент. 62
Литература 70
Задания.
Задание №1. 70
Задание №2(для риэлтеров). 77
Темы рефератов по дисциплине «Основы проектирования». 80 - 94
1. Плоская система сходящихся сил.
1.1. Сила-вектор
Сила
![]() вполне определяется четырьмя элементами
(рис.1.1):
вполне определяется четырьмя элементами
(рис.1.1):
Точкой приложения (начальной точкой) A;
Линией действия L, проходящей через точку A так, чтобы на ней лежал вектор силы.
Направлением вектора на прямой L, т.е указанием на то, по какую сторону от точки A на прямой L лежит точка B-конец вектора.
Длиной (модулем).
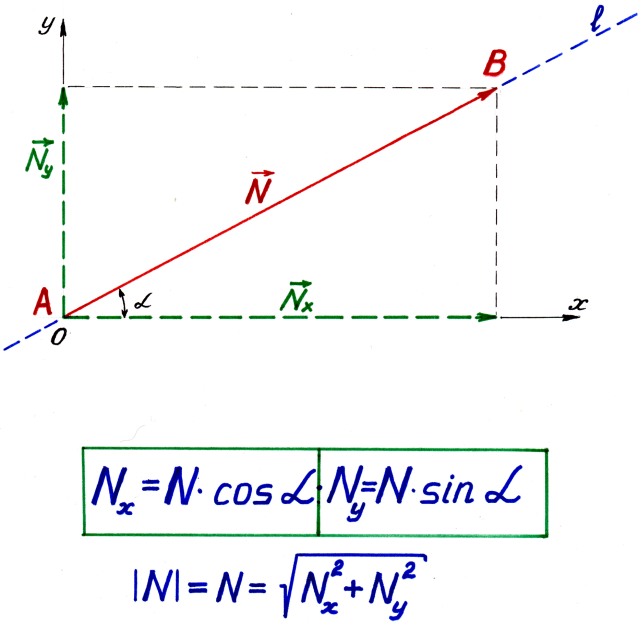
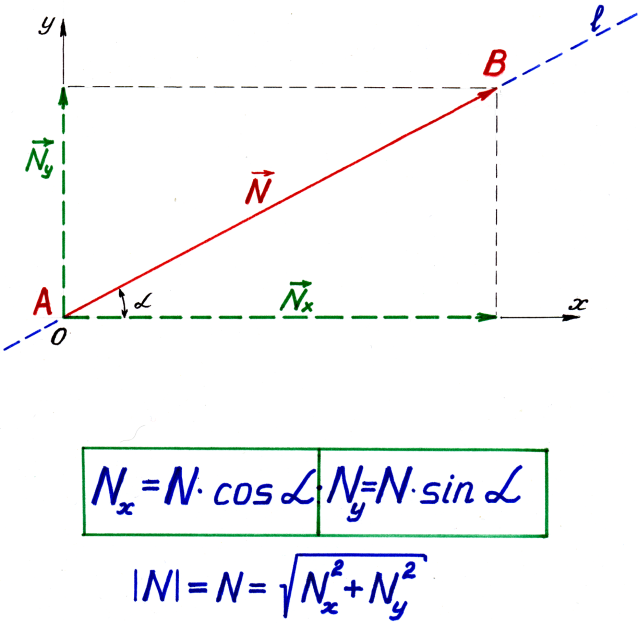
Рис.1.1
Величины
проекций вектора ![]() на взаимно перпендикулярные оси x и y
на взаимно перпендикулярные оси x и y
![]() N
N![]() cos
α;
cos
α;
![]()
В данном случае проекции положительны , т.к их направления совпадают с положительными направлениями выбранных осей. В противном случае проекция отрицательна.
Модуль вектора
![]() =
=![]()
Если
сила параллельна оси, то проекция силы
на эту ось равна модулю силы, взятому
со знаком плюс или минус в зависимости
от того, какой угол (![]() )
составляет сила с положительным
направлением оси. Если сила перпендикулярна
оси, то её проекция на эту ось равна
нулю.
)
составляет сила с положительным
направлением оси. Если сила перпендикулярна
оси, то её проекция на эту ось равна
нулю.
1.2. Сложение двух сил, сходящихся в одной точке.
Рассмотрим
подвеску контактного провода массой m
(рис. 1.2а). Отбросим подвески, заменив
их силами ![]() и
и ![]() ,
приложенными в узле 1 и направленными
от него , т.е предположив подвески
растянутыми. Равнодействующей усилий
,
приложенными в узле 1 и направленными
от него , т.е предположив подвески
растянутыми. Равнодействующей усилий
![]() и
и ![]() будет сила
будет сила
![]() =
=![]() +
+ ![]() ,
,
совпадающая с диагональю параллелограмма ,построенного на исходных векторах-слагаемых (рис. 1.2б). Первый индекс означает номер точки приложения вектора, второй - в сторону которой направлен вектор.
а) б) в)


Рис.1.2
Суммой
двух векторов ![]() и
и ![]() называют такой третий вектор
называют такой третий вектор![]() ,
начало которого совпадает с началом
вектора
,
начало которого совпадает с началом
вектора ![]() ,
а конец- с концом вектора
,
а конец- с концом вектора![]() ,
при непременном условии, что конец
вектора
,
при непременном условии, что конец
вектора ![]() совмещён с началом вектора
совмещён с началом вектора![]() (рис.1.2в).
(рис.1.2в).
Величина
равнодействующей ![]()
N=![]()
По теореме синусов
![]()
или
![]()