

1.3 Сложение нескольких сил, сходящихся в одной точке.
Полигоном нескольких векторов называется ломаная, составленная из этих векторов так, что конец одного из них совпадает с началом второго, конец второго – с началом третьего и т.д.
Суммой нескольких векторов называется вектор, идущий от начала полигона, составленного из векторов-слагаемых, к его концу (рис. 1.3).Сложение нескольких векторов может быть выполнено и последовательно (рис. 1.4 ).
Равнодействующую системы сходящихся сил можно определить и аналитически. Для этого выбирают систему координатных осей x и y , находят углы наклона каждой силы. Проекция равнодействующей на ось x равна алгебраической сумме проекций слагаемых сил на эту ось (рис.1.5)

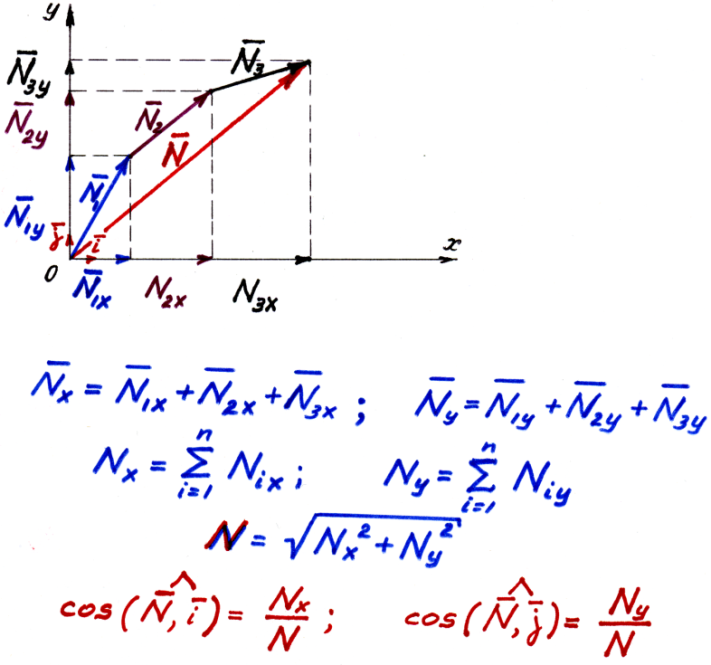
Рис. 1.3. Рис. 1.4. Рис.1.5.
![]() .
.
Аналогично

Здесь n- число слагаемых векторов. Величина равнодействующей
![]()
Направляющие косинусы:
![]() ,
,
где i, j - единичные вектора в направлении оси x и y соответственно.
1.4 Равновесие системы сходящихся сил.
Если полигон векторов замыкается, то сумма векторов, его составляющих, равна нуль - вектору. И наоборот . Для того ,чтобы система сходящихся сил находилась в равновесии, необходимо и достаточно равенства нулю равнодействующей этой системы сил:
R=0.
Например, сумма сил (рис. 1,2, 1.6 ) из условия равновесия
![]() .
.
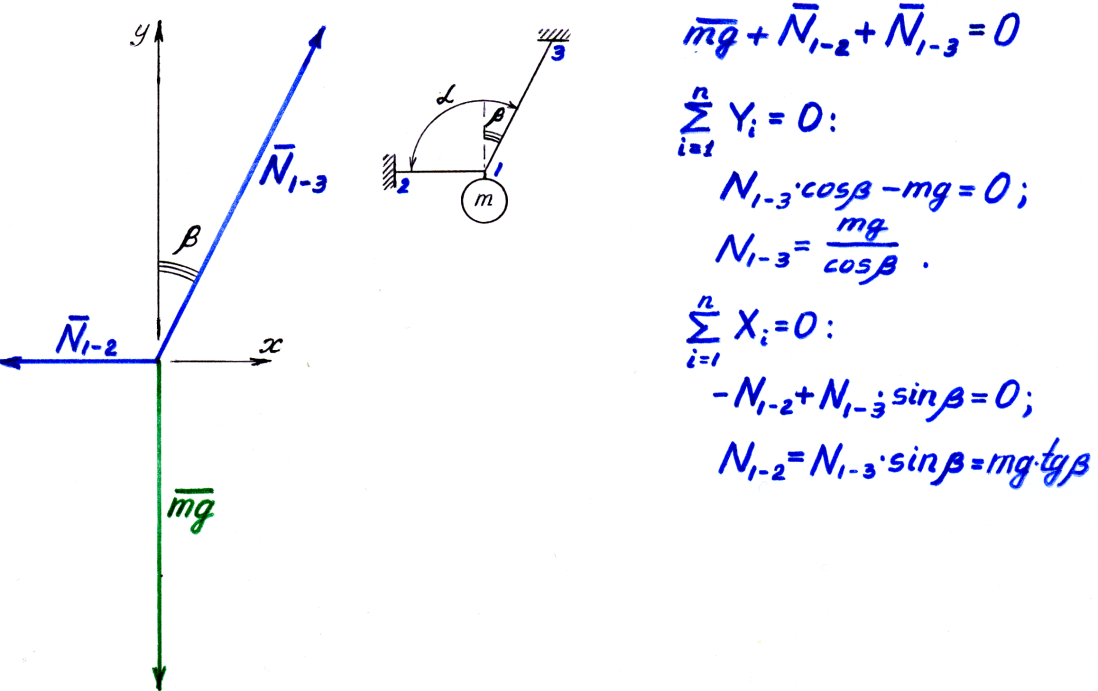
Рис.1.6.
В
проекции на ось y
при γ =![]() :
:

В проекции на ось x:

Знаки
« + » говорят о том, что предположение о
том , что усилия ![]() и
и ![]() являются растягивающими, верны.
являются растягивающими, верны.
2. Плоская система произвольно расположенных сил.
2.1. Момент силы относительно точки.
а) б)

Рис.2.1.
На
рис.2.1 ℓ-линия действия силы ![]()
О - моментная точка: точка, относительно которой необходимо определить момент,
h - плечо: кратчайшее расстояние от моментной точки до линии действия силы (длина перпендикуляра).
Для рис.2.1а (сила Р старается повернуть по часовой стрелке ):
M= +Рh .
Для рис.2.1б (вращение против часовой стрелки)
M= -Рh.
Моментом
М силы ![]() относительно точки О называется взятое
со знаком произведение силы на плечо:
относительно точки О называется взятое
со знаком произведение силы на плечо:![]()
![]() .
.
С понятием момента силы мы встречаемся, открывая дверь, водопроводный кран, затягивая гайку гаечным ключом, вращая педали велосипеда и т.д.
Слишком большой момент силы не всегда полезен. Чтобы не сорвать резьбу, ограничивают длину гаечного ключа. При заданных длине и поперечном сечении стойки необходимо ограничить размер рекламного щита, чтобы при порывах ветра стойку не согнуло (рис2.2).

Рис.2.2.
2.2. Момент пары сил.
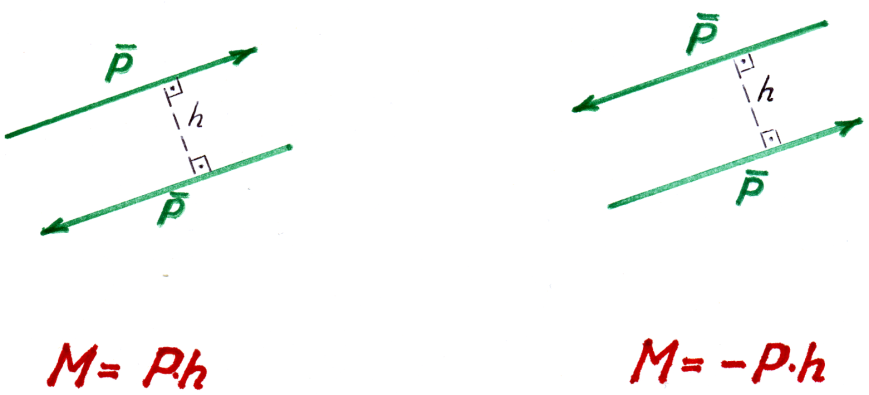
Рис.2.3.
Момент равных по величине, параллельных (колллинеарных), но с несовпадающими линиями действия противоположно направленных сил (рис. 2.3 )
![]() ,
,
где h- расстояние между линиями действиями сил (плечо пары).
2.3. Главный вектор. Главный момент.
Сложение сил, произвольно расположеных в плоскости, можно выполнить:
последовательным сложением;
2)приведением данной системы сил к произвольно выбранному центру.
Первый способ громоздок при большом количистве сил (а для пространственной неприменим).
Второй является общим и удобным.
Перенося
все силы ![]() произвольно в точку О, называемую
центром приведения, получим приложенную
в этом центре силу:
произвольно в точку О, называемую
центром приведения, получим приложенную
в этом центре силу:

и пару с моментом
![]()
Главный вектор системы сил- геометрическая сумма сил данной системы.
Главный момент плоской системы сил точки О- алгебраическая сумма мометов сил этой системы относительно точки О.