

Найдем кинетический момент нмс, вращающейся относительно неподвижной оси Оz (рис. 33)
![]() .
.
Скорость -й точки НМС, вращающейся относительно неподвижной оси, определится соотношением (Ч.1 Кинематика):
![]() ,
,
где – угловая скорость НМС, а h – расстояние от -й точки НМС до оси z.
Момент количества движения -й МТ относительно оси Oz примет вид:
![]() .
.

Рис. 33
Тогда кинетический момент НМС относительно неподвижной оси определится из соотношения:
![]()
здесь
 – момент инерции НМС относительно осиOz.
– момент инерции НМС относительно осиOz.
Итак, для кинетического момента НМС, вращающейся относительно неподвижной оси, получим:
![]() . (4.28)
. (4.28)
Величина кинетического момента НМС, вращающейся относительно неподвижной оси, равна произведению момента инерции НМС относительно той же оси на угловую скорость НМС (4.28).
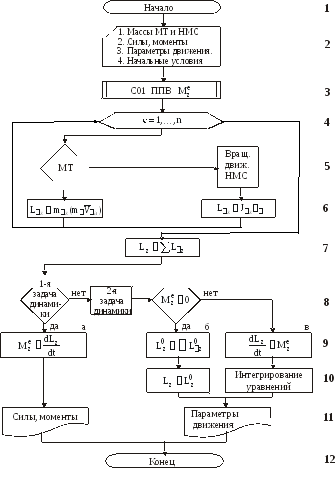
4.7. Алгоритм решения задач с помощью теоремы об изменении кинетического момента смт – схема алгоритма д47 кмс с комментариями и примерами
Комментарии
К.2. Рассматриваемый объект принимается за МС и указывается система координат (ось вращения), относительно которой исследуется движение. Выделяются и нумеруются МТ и НМС, входящие в МС.
На чертеже изображается силовая схема, т.е. изображаются все внешние силы и моменты, действующие на МС, в том числе внешние пассивные силы – силы реакций связи и реактивные моменты на основании принципа освобождаемости от связей (аксиома 5 статики). Определяются начальные условия.
К.6.
Кинетический
момент МС определяется для текущего
или заданного момента времени. В выражение
для момента количества движения МТ
относительно оси входит ее абсолютная
скорость, поэтому для отыскания
![]() может быть использована схема алгоритма
К07 СДТ (Ч.1 Кинематика). Момент количества
движения МТ относительно оси находится
по тем же правилам, что и момент силы
относительно оси (схема алгоритма С04
ППВ Ч.2 Статика), причем часто более
удобно определять отдельно моменты
количества переносного и относительного
движений. Все скорости (угловые НМС и
линейные МТ) выражаются либо через ту,
которая задана, либо через ту, которую
необходимо определить (может быть
использована схема алгоритма К03 ВДТ
Ч.1 Кинематика). Типовые формулы моментов
инерции НМС приведены в таблице 2. Если
ось вращения не проходит через центр
масс, то применяется теорема
Штейнера–Гюйгенса (формула (3.22)).
может быть использована схема алгоритма
К07 СДТ (Ч.1 Кинематика). Момент количества
движения МТ относительно оси находится
по тем же правилам, что и момент силы
относительно оси (схема алгоритма С04
ППВ Ч.2 Статика), причем часто более
удобно определять отдельно моменты
количества переносного и относительного
движений. Все скорости (угловые НМС и
линейные МТ) выражаются либо через ту,
которая задана, либо через ту, которую
необходимо определить (может быть
использована схема алгоритма К03 ВДТ
Ч.1 Кинематика). Типовые формулы моментов
инерции НМС приведены в таблице 2. Если
ось вращения не проходит через центр
масс, то применяется теорема
Штейнера–Гюйгенса (формула (3.22)).
К.7. Суммирование моментов количеств движения МТ и НМС происходит с учетом их знаков.
К.10в. При интегрировании используется либо метод разделения переменных, либо теория линейных дифференциальных уравнений первого и второго порядков. Постоянные интегрирования находятся с помощью начальных условий.
Примечание
Теорема об изменении кинетического момента СМТ может быть использована при решении задач в тех случаях, когда НМС совершает вращательное движение относительно неподвижной оси, а МТ –любое движение.
Теорема об изменении кинетического момента СМТ также может быть использована при решении задач для НМС с одной закрепленной точкой (сферическое движение). В этом случае в уровнях 3 и 7 схемы алгоритма решения задач Д47 КМС главный момент внешних сил и кинетический момент определяются относительно трех осей.
Таблица 2