

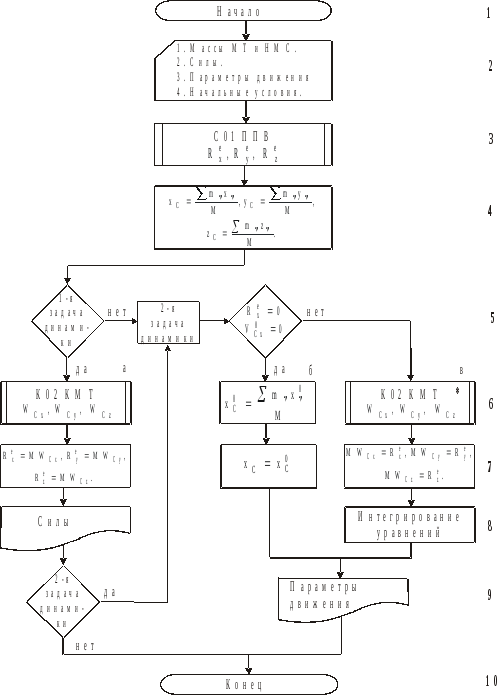
4.5. Алгоритм решения задач с помощью теоремы о движении центра масс смт – схема алгоритма д45 цмс с комментариями и примерами
Комментарии
К.2. Рассматриваемый объект принимается за МС, указывается система отсчета, в которой исследуется ее движение. Выделяются и нумеруются МТ и НМС, входящие в МС. На чертеже изображается силовая схема, т.е. рисуются все внешние силы и моменты, действующие на МС, в том числе внешние пассивные силы и моменты – реакции связи на основании принципа освобождаемости от связей (аксиома 5 статики). Формулируются начальные условия.
К.3, 4. Находятся проекции главного вектора внешних сил и радиуса-вектора центра масс только на те направления (оси), вдоль которых необходимо определить силы (1-я задача динамики) и перемещения или кинематические параметры (2-я задача динамики).
Координаты центра масс МС вычисляются для текущего или заданного момента времени через заданные размеры и параметры движения. Для определения координат центра масс может быть использована схема алгоритма С08 ОЦТ (Ч.2 Статика), а в случае сложного движения МТ, входящей в МС, алгоритм К07 СДТ (Ч.1 Кинематика).
К.5.б.
Для случая![]() и
и![]() ось x выбрана для определенности. В
реальной задаче такой осью может быть
любая другая.
ось x выбрана для определенности. В
реальной задаче такой осью может быть
любая другая.
К.8.в. При интегрировании используются либо метод разделения переменных, либо теория линейных дифференциальных уравнений первого и второго порядков. Постоянные интегрирования находятся с помощью начальных условий.
Примечание
Теорема о движении центра масс МС чаще всего применяется в случаях, когда НМС совершает поступательное движение, а МТ - любое движение, для определения перемещений того или иного объекта и для определения пассивных сил – реакций связи, вызванных этими перемещениями.
Пример 1
2Электрический мотор массы![]() установлен без крепления на негладком
горизонтальном фундаменте (коэффициент
трения скольжения f). На валу мотора под
прямым углом закреплен одним концом
однородный стержень длиной 2и массы
установлен без крепления на негладком
горизонтальном фундаменте (коэффициент
трения скольжения f). На валу мотора под
прямым углом закреплен одним концом
однородный стержень длиной 2и массы![]() .
На другой конец стержня насажен точечный
груз массы
.
На другой конец стержня насажен точечный
груз массы![]() (рис. 31). Угловая скорость вала постоянна
и равна
(рис. 31). Угловая скорость вала постоянна
и равна![]() .
Определить суммарную силу давления
.
Определить суммарную силу давления![]() на фундамент, горизонтальное перемещение
мотора и условия, при которых мотор
будет подпрыгивать, не будучи прикреплен
болтами.
на фундамент, горизонтальное перемещение
мотора и условия, при которых мотор
будет подпрыгивать, не будучи прикреплен
болтами.
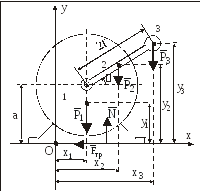
Рис. 31
В начальный момент мотор находится в покое и стержень горизонтален. Ось х горизонтальна, ось у проходит через вал в начальный момент времени.
МС состоит из: двух АТТ (мотор и стержень) и МТ (груз).
3 С04 ППВ
С04 ППВ
![]()
3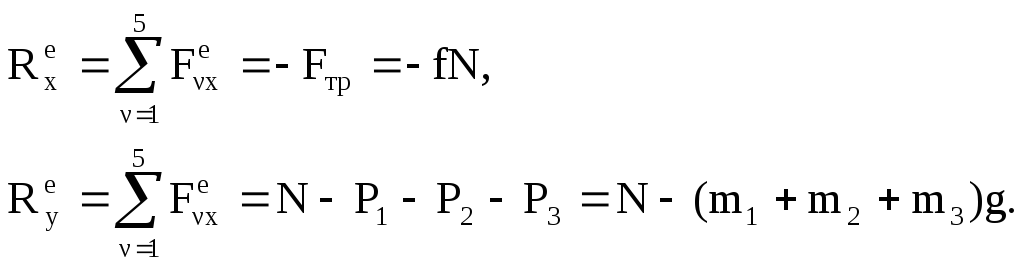
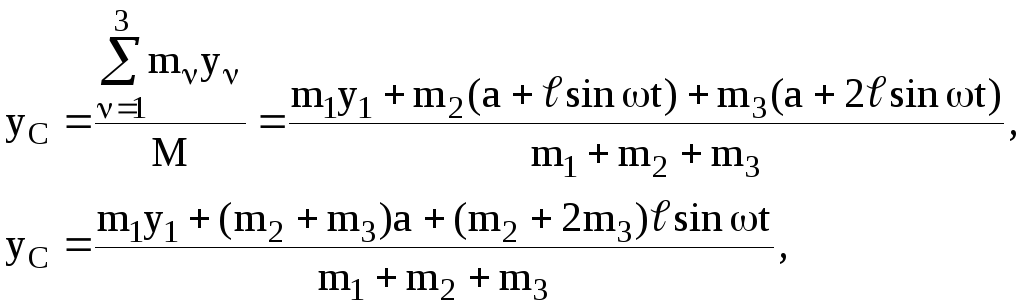
Обозначим координаты центра масс мотора через х1, у1, центра масс стержня х2, у2, и координаты груза х3, у3в момент времениt. Координаты центра масс стержня и груза записы-ваются с учетом того, что они участвуют в сложном движении (переносном движении вместе с мотором и относительном вращательном движении относительно мотора).
4
![]()
здесь
![]() – перемещение мотора (переменная
величина),
– перемещение мотора (переменная
величина),
![]()
здесь
![]()
51-я задача динамики – определить силу
реакции фундамента![]() (используется проекция на ось у).
(используется проекция на ось у).
6 а К01
КМТ
а К01
КМТ
![]()
8б![]()
7а
![]()
8а
![]()
Ответ:
![]()
Мотор будет подпрыгивать над фундаментом,
если
![]() ,
,
т.е. при
![]() ,
,![]() .
.
9а2-я задача
динамики – определить горизонтальное
перемещение![]() мотора (используется проекция на ось
х).
мотора (используется проекция на ось
х).
5![]() .
.
6в![]()
![]()
7в
![]()
![]() .
.
Подставляется
![]() из8аи
определяется
из8аи
определяется![]() :
:
![]()
8вДважды интегрируется предыдущее уравнение
![]()
Постоянные интегрирования определяются с помощью начальных условий:
при t
= 0 x = 0, следовательно,
![]()
при t = 0
![]() ,
следовательно,
,
следовательно,![]()
9вОтвет:![]() .
.
Пример 2
2Три тела
массы![]() соединенные нерастяжимой нитью,
переброшенной через неподвижные блоки,
находятся на трапеции массы
соединенные нерастяжимой нитью,
переброшенной через неподвижные блоки,
находятся на трапеции массы![]() (рис. 32)
(рис. 32)
Определить перемещение трапеции
относительно пола, если тело массы
![]() опустится вниз на h. Трением скольжения
и массами блоков и нити пренебречь.
опустится вниз на h. Трением скольжения
и массами блоков и нити пренебречь.
В начальный момент времени трапеция и тела находятся в покое. Ось х горизонтальна, ось у проходит через положение центра масс трапеции в начальный момент времени.
МС состоит из: АТТ (усеченной пирамиды) и трех МТ.

Рис. 32
3 С04
ППВ
С04
ППВ
![]()
3![]() .
.
4
![]() .
.
Здесь
![]() – абсцисса центра масс МС после того,
как МТ массы
– абсцисса центра масс МС после того,
как МТ массы![]() опустится на h. Абсциссы трех МТ для
указанного момента времени записываются
с учетом того, что эти МТ участвуют в
сложном движении (переносное перемещение
вместе с трапецией наsи
относительное перемещение этих МТ
относительно трапеции).
опустится на h. Абсциссы трех МТ для
указанного момента времени записываются
с учетом того, что эти МТ участвуют в
сложном движении (переносное перемещение
вместе с трапецией наsи
относительное перемещение этих МТ
относительно трапеции).
![]() - абсцисса центра масс трапеции, а
- абсцисса центра масс трапеции, а![]() – координаты МТ в начальный момент
времени.
– координаты МТ в начальный момент
времени.
52-я задача динамики – определитьs(используются проекции на ось x).
![]() ,
,![]()
6б
7б![]()
![]()
9Ответ:![]()
4.6. Теорема об изменении
кинетического момента СМТ
Запишем
теорему об изменении момента количества
движения МТ (1.34) для -й
точки СМТ, учтя, что на нее действуют
![]() –
равнодействующая всех внешних сил и
–
равнодействующая всех внешних сил и
![]() – равнодействующая всех внутренних
сил:
– равнодействующая всех внутренних
сил:
![]() .
(=1,2,...,n)
.
(=1,2,...,n)
Просуммировав эти выражения и учитывая, что сумма производных равна производной от суммы, получим:
 (4.21)
(4.21)
Используя формулу для главного момента системы сил (Ч.2 Статика) и учтя свойство внутренних сил – соотношение (3.3), имеем:
![]() ,
,![]() ,
(4.22)
,
(4.22)
где
![]() - главный момент всех внешних сил, а
- главный момент всех внешних сил, а![]() - главный момент всех внутренних сил
относительно какого-либо центра.
- главный момент всех внутренних сил
относительно какого-либо центра.
Введем понятие кинетического момента СМТ относительно какого-либо центра О.
Определение: Кинетическим моментом или моментом количества движения СМТ называется геометрическая сумма моментов количества движения МТ, входящих в СМТ, относительно того же центра:
![]() . (4.23)
. (4.23)
Подставив (4.22) и (4.23) в (4.21), получим теорему об изменении кинетического момента СМТ в следующем виде:
![]() .
(4.24)
.
(4.24)
Теорема: Производная по времени от кинетического момента СМТ относительно какого-либо центра равна главному моменту всех внешних сил, действующих на СМТ, относительно того же центра.
Спроектировав соотношения (4.24) на оси декартовой системы координат с началом в центре О и учтя связь между моментами силы относительно точки и оси, получим:
 (4.25)
(4.25)
Отсюда следует, что производная по времени от проекции кинетического момента СМТ на какую-либо ось равна проекции главного момента всех внешних сил, действующих на СМТ, на эту ось или сумме моментов всех внешних сил, действующих на СМТ, относительно этой оси.
Следствия:
Если
 ,
то из соотношения (4.24) следует, что
,
то из соотношения (4.24) следует, что
![]() .
.
Если главный момент внешних сил, действующих на СМТ, относительно какого-либо центра равен нулю, то кинетический момент СМТ относительно того же центра постоянен по величине и направлению и равен кинетическому моменту СМТ относительно того же центра в начальный момент времени:
![]() .
(4.26)
.
(4.26)
Соотношение (4.26) выражает закон сохранения кинетического момента для СМТ.
Если
 (для определенности выбрана ось х), то
из первого соотношения (4.25) следует,
что
(для определенности выбрана ось х), то
из первого соотношения (4.25) следует,
что
![]() .
.
Если проекция главного момента всех внешних сил, действующих на СМТ, на какую-либо ось (сумма моментов всех внешних сил относительно какой-либо оси) равна нулю, то проекция кинетического момента на эту ось является постоянной величиной и равняется проекции кинетического момента на эту ось в начальный момент времени
![]() . (4.27)
. (4.27)