

4.2. Алгоритм решения задач с помощью уравнений равновесия в обобщенных координатах и уравнений Лагранжа второго рода – схемы алгоритмов а42 урок, а42 удок с комментариями и примерами
Комментарии
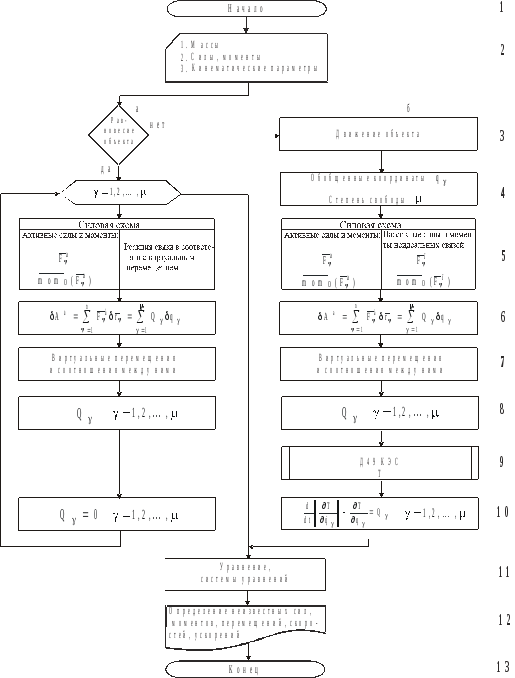
К.2. Принимается рассматриваемый объект или за МТ, или АТТ, или НМС, или МС, или СМТ.
К.4а. Определяется количество реакций опор (сил, моментов) объекта, находящегося в равновесии.
К.4б. Выбираются
обобщенные координаты
![]() в соответствии с числом степеней свободы
–
движущегося объекта.
в соответствии с числом степеней свободы
–
движущегося объекта.
К.5а. Изображается силовая схема для объекта, находящегося в равновесии, в которую входят активные силы и реакция связи (сила, момент), в точке приложения которой допускается виртуальное перемещение. Силовая схема изображается отдельно для каждой из реакции связи.
К.5б. Изображается силовая схема для объекта, находящегося в движении, в которую входят активные силы и моменты и пассивные силы и моменты неидеальных связей (силы трения скольжения и моменты трения качения), которые условно включаются в активные силы и моменты. Реакции идеальных связей можно не изображать, так как их работа на виртуальных перемещениях равна нулю.
К.6а,б. Записывается сумма элементарных работ сил и моментов на виртуальных перемещениях на основании формул работы сил и моментов и схемы алгоритма Д49 КЭС (Ч.3 Динамика). В случае равновесия объекта сумма элементарных работ сил и моментов записывается для каждого случая определения реакции связи.
К.7а,б. Изображаются виртуальные перемещения для всех точек приложения сил и виртуальные углы поворотов, связанные с моментами.
Все виртуальные перемещения выражаются в случае равновесия объекта через одно виртуальное перемещение, а в случае движения объекта через виртуальные перемещения, число которых соответствует степени свободы рассматриваемого объекта. Используются формулы, теоремы из Ч. 1 Кинематика, в частности, формулы для различных типов передачи движения, понятия мгновенного центра скоростей (здесь мгновенный центр виртуальных перемещений) или теорему о проекциях скоростей двух точек плоской фигуры на прямую, соединяющую эти точки (здесь проекции виртуальных перемещений) в случае плоско-параллельного движения; теорему о сложении скоростей (здесь виртуальных перемещений) в сложном движении и другие кинематические соотношения.
К.8а,б. Подставляются в сумму элементарных работ зависимости между виртуальными перемещениями. Группируются слагаемые при виртуальных перемещениях.
Записываются выражения для обобщенных сил, которыми являются коэффициенты при вариациях обобщенных координат.
К.9б. Записывается выражение для кинетической энергии объекта с использованием схемы алгоритма Д49 КЭС (Ч. 3 Динамика). Все скорости выражаются через обобщенные скорости, при этом могут быть использованы соотношения, полученные ранее для виртуальных перемещений.
К.10а,б. Используются
в случае равновесия объекта условия
равновесия в обобщенных координатах.
Этих условий будет столько, сколько
необходимо определить реакции опор. В
случае движения объекта используются
уравнения движения в обобщенных
координатах – уравнения Лагранжа
второго рода, предварительно определив
частные производные
![]() ,
,![]() .
.
К.11. Получаются алгебраические уравнения в случае равновесия объекта и дифференциальное уравнение или система дифференциальных уравнений, состоящая из уравнений, случае движения объекта.
Примечание.
Примеры 1-3 с использованием принципа виртуальных перемещений могут также быть решены с использованием условий равновесия СМТ в обобщенных координатах.