

Пример 1.
2
Груз весом Р соединен нерастяжимой
нитью с системой вращающихся АТТ (рис.
2). Найти зависимость между весом груза
Р и моментом, приложенным к стержню 7,
чтобы МС находилась в равновесии, если
![]() см,
см,
![]() см,
см,
![]() см.
см.
Рассматриваемый объект принимается за МС, состоящую из МТ – груз весом Р и шести АТТ: 2–7.
3
Связи стационарные, удерживающие и
идеальные. Силовая схема, состоящая из
силы
![]() и момента
и момента![]() ,
представлена на рис. 2.
,
представлена на рис. 2.
4 Векторная форма: да.
5а Равновесие: да.
6
 а Д49 КЭС
а Д49 КЭС
![]()
![]()

 3 – 6
3 – 6

Рис.2
7а
Виртуальные перемещения
![]() изображены на рис. 2
изображены на рис. 2
8а
Соотношения между виртуальными
перемещениями
![]() и
и![]() аналогичны соотношениям между
перемещениями
аналогичны соотношениям между
перемещениями
![]() и
и![]() ,
установленными в примере 2 главы 3, п.
3.9. Ч. 1 Кинематика (рис. 20):
,
установленными в примере 2 главы 3, п.
3.9. Ч. 1 Кинематика (рис. 20):
![]()
9 Подставив
в
![]() соотношение между виртуальными
перемещениями, найденными в уровне8а,
получим:
соотношение между виртуальными
перемещениями, найденными в уровне8а,
получим:
![]()
![]()
10
Ответ: ![]() .
.
Пример 2
2
В механизме, изображенном на рис. 3 на
кривошип действует момент – ![]() Нм. Определить
силу
Нм. Определить
силу
![]() ,
которая должна быть приложена к ползунуD5,
чтобы МС находилась в равновесии.
,
которая должна быть приложена к ползунуD5,
чтобы МС находилась в равновесии.
![]() м,
м,![]() м.
м.
Введены обозначения,
которые использовались при рассмотрении
плоско-параллельного движения НМС –
пример 3, глава 4, п. 4.12, Ч. 1 Кинематика
(рис. 45), рассматриваемый объект принимается
за МС, состоящую из пяти АТТ: 1–5 и одной
МТ – ползун
![]()
.

Рис. 3
3
Связи стационарные, удерживающие и
идеальные. Силовая схема, состоящая из
момента
![]() и силы
и силы![]() ,
представлена на рис. 3.
,
представлена на рис. 3.
4 Векторная форма: да.
5а Равновесие: да.
6
 а Д49 КЭС
а Д49 КЭС
![]()
![]()

 3 – 6
3 – 6
7а
Виртуальные перемещения
![]() изображены на рис. 3.
изображены на рис. 3.
8а
Соотношения между виртуальными
перемещениями аналогичны соотношениям
между скоростями, установленными в
примере 3 главы 4, п. 4.12, Ч. 1 Кинематика
(рис. 45). Использовано понятие мгновенного
центра виртуальных перемещений для
точек каждого звена механизма (![]() ):
):
=1
![]() .
.
=2
 ,
,![]() .
.
Здесь
![]() - мгновенный центр виртуальных перемещений
второго звена, положение которого
определяется аналогично нахождению
положения мгновенного центра скоростей
(Ч.1 Кинематика).
- мгновенный центр виртуальных перемещений
второго звена, положение которого
определяется аналогично нахождению
положения мгновенного центра скоростей
(Ч.1 Кинематика).
![]() ,
,
![]() м,
м,![]() м,
м,
![]() .
.
=4
![]() .
.
=5
![]() .
.
9 Подставив
в
![]() соотношение между виртуальными
перемещениями, найденными в уровне8а,
получим:
соотношение между виртуальными
перемещениями, найденными в уровне8а,
получим:
![]() ,
,
![]() .
.
![]() .
.
Ответ:
 .
.
Пример 3
2
Два стержня ВС и DC
весом Р1=Р2=Р=20
Н и длины
каждый соединены шарниром С (рис. 4).
Конец D
стержня DС
закреплен шарнирно, а конец В стержня
ВС опирается на шероховатый пол.
Определить минимальную силу трения Fтр
в точке В, чтобы удержать стержни в
равновесии при углах
![]() и
и![]() .
.
Рассматриваемый объект принимается за МС, состоящую из двух АТТ: стержни ВС и DC.
3
Связи стационарные, удерживающие и
идеальные в точке D
и неидеальные в точке В. Связь в точке
В неидеальная, поэтому в принцип
виртуальных перемещений войдет сила
![]() в качестве активной силы. Силовая схема,
состоящая из сил
в качестве активной силы. Силовая схема,
состоящая из сил![]() ,
,![]() и
и![]() представлена на рис. 4.
представлена на рис. 4.
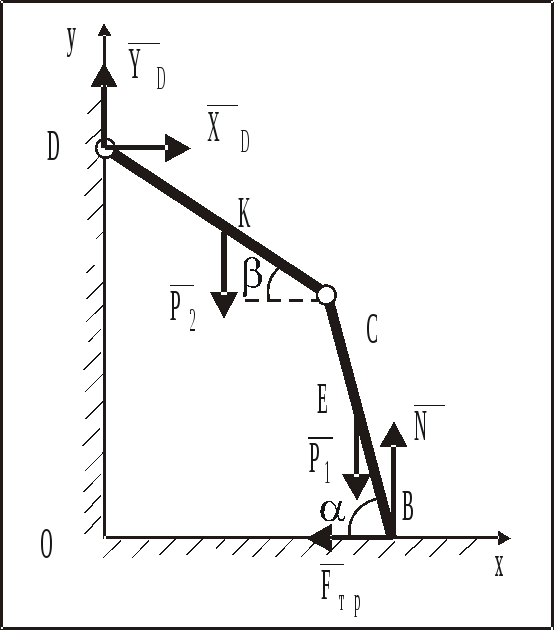
Рис. 4
4 Алгебраическая форма: да.
5в Равновесие: да.
6

 в
Д49 КЭС
в
Д49 КЭС
![]()
![]()
 3 – 6
3 – 6
7в Проекции сил на оси декартовой системы координат:
![]() ,
,
![]() ,
,![]() ,
,![]() .
.
Координаты точек приложения сил (записываются те координаты точек приложения сил, для которых проекции сил не равны нулю):
![]() ,
,
![]() ,
,![]() .
.
8в Вариации координат:
![]() ,
,
![]() ,
,![]() .
.
Степень свободы: =1
Связь между
вариациями
![]() и
и![]() находится из вариации выражения:
находится из вариации выражения:
![]() ,
,
![]() ,
,
![]() .
.
Следовательно, подставив в вариации координат, получим:
![]() ,
,
![]() ,
,![]() .
.
9
Подставив в
![]() проекции сил, найденных в уровне7в
и вариации координат, найденных в уровне
8в,
получим:
проекции сил, найденных в уровне7в
и вариации координат, найденных в уровне
8в,
получим:
![]()
![]() .
.
10
Ответ: ![]() .
.
Примечание.
Задачи по определению реакций опор МС чаще решаются с помощью условий равновесия СМТ в обобщенных координатах (пример 6).