Пример 7
2 Используя условие задачи примера 4 (рис. 5), определить ускорение груза и его скорость в зависимости от пройденного им пути с помощью уравнения Лагранжа второго рода.
3 Равновесие объекта: нет, движение объекта.
4
Обобщенная координата:
![]() .
.
Степень свободы:
![]() .
.
5б
Связи стационарные, удерживающие и
неидеальные (работы силы трения скольжения
и момента трения качения на виртуальных
перемещениях не равны нулю). Силовая
схема, состоящая из
![]() представлена на рис. 15.
представлена на рис. 15.
Нормальные реакции
связей
![]() не войдут в обобщенные силы, так как их
работы на виртуальных перемещениях
равны нулю.
не войдут в обобщенные силы, так как их
работы на виртуальных перемещениях
равны нулю.
Сила трения скольжения и момент трения качения условно принимаются за активные силы:
![]() ,
,
![]() .
.
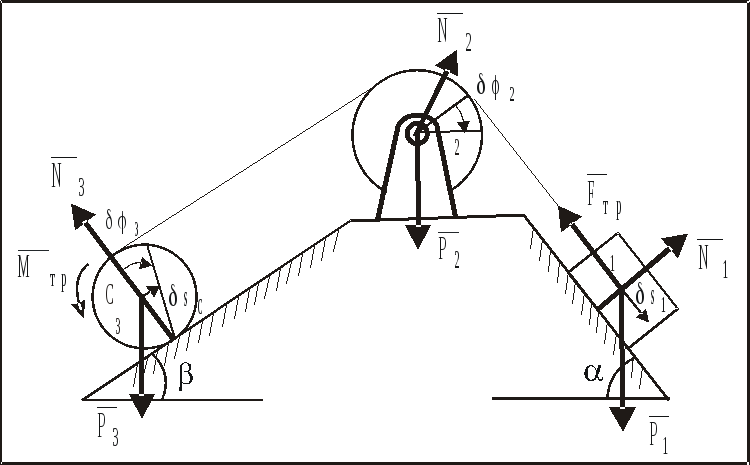
Рис. 15
6



![]() б
Д49 КЭС
3 – 6
б
Д49 КЭС
3 – 6
![]()
![]()
7б
Виртуальные перемещения
![]() изображены на рис. 15.
изображены на рис. 15.
Соотношения между
виртуальными перемещениями выражаются
через
![]() ,
так как степень свободы МС
,
так как степень свободы МС![]() .
Эти соотношения получены в примере 4
настоящей главы:
.
Эти соотношения получены в примере 4
настоящей главы:
![]() ,
,
![]() ,
,![]()
8б
Подставив в
![]() полученные в уровне5б
выражения для силы трения скольжения,
момента трения качения, а также соотношения
между виртуальными перемещениями,
найденные в уровне 6б,
получим:
полученные в уровне5б
выражения для силы трения скольжения,
момента трения качения, а также соотношения
между виртуальными перемещениями,
найденные в уровне 6б,
получим:

 .
.
9
 б
Д49 КЭС
б
Д49 КЭС
Т
Кинетическая энергия МС найдена в примере 1 главы 4, п. 4.9, Ч.3 Динамика (рис. 38).
![]() .
.
10б
![]() ,
,![]() .
.
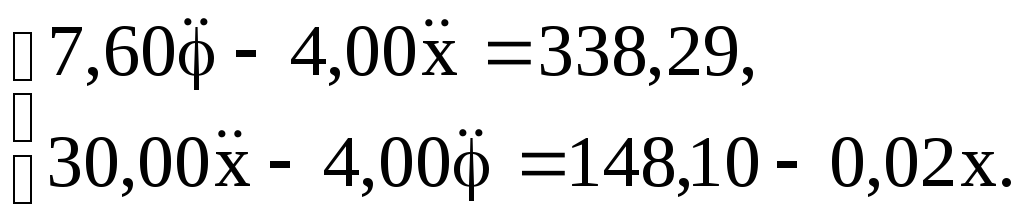
11 Составим уравнение Лагранжа второго рода
![]() .
.

 .
.
12 Ответ:
 .
.
Скорость груза с учетом нулевых начальных условий можно найти путем искусственного преобразования и интегрирования методом разделения переменных (аналогично тому, как это сделано в примере 4 настоящей главы):

Условия того, чтобы
груз опускался
![]() ,
т.е.
,
т.е.
![]() .
.
Эти условия выполняются, следовательно, груз 1 опускается.
Пример 8
2 Используются условия задачи примера 5 (рис. 6).
Найти системуыражаем
все изображенные на рис.
3 Равновесие объекта: нет, движение объекта.
4б
Обобщенные координаты
![]() .
.
Степень свободы
![]() .
.
5б Связи стационарные, удерживающие и идеальные.
Силовая схема,
состоящая из
![]() ,
представлена на рис. 16. Сила упругости
,
представлена на рис. 16. Сила упругости![]() .
.
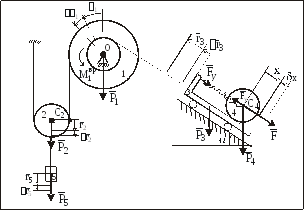
Рис. 16
Р![]() еакции
идеальных связей
еакции
идеальных связей![]() можно не изображать на рисунке, так как
они не войдут в обобщенные силы.
можно не изображать на рисунке, так как
они не войдут в обобщенные силы.
6


 б
Д49 КЭС
3 – 6
б
Д49 КЭС
3 – 6
![]()
7б
Виртуальные перемещения
![]() ,
,![]() (виртуальное абсолютное перемещение
центра масс катка),
(виртуальное абсолютное перемещение
центра масс катка),![]() (виртуальное относительное перемещение
центра масс катка),
(виртуальное относительное перемещение
центра масс катка),![]() изображены на рис. 16.
изображены на рис. 16.
Соотношения между
виртуальными перемещениями выражаются
через
![]() ,
так как степень свободы МС
,
так как степень свободы МС![]() .
.
Эти соотношения получены в примере 5:
![]() ,
,
![]() ,
,![]() ,
,
![]() ,
,
![]() ,
,![]()
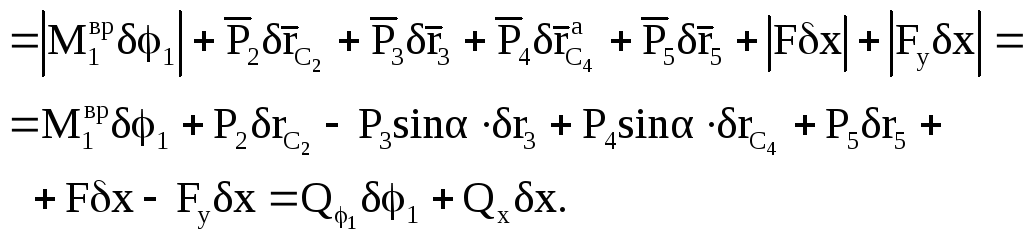
8б Подставим
в
![]() полученное
в уровне5б
выражение для силы упругости, а также
соотношения, выражающие зависимость
между виртуальными перемещениями,
найденные в уровне 7б,
получим:
полученное
в уровне5б
выражение для силы упругости, а также
соотношения, выражающие зависимость
между виртуальными перемещениями,
найденные в уровне 7б,
получим:

![]()
![]() .
.
9
 б
Д49 КЭС
б
Д49 КЭС
Т
![]()
![]()
8 Неподвижный блок совершает вращательное
движение.
Неподвижный блок совершает вращательное
движение.
9
![]() ,
здесь
,
здесь![]() .
.
![]()
8 Подвижный блок совершает плоско-параллельное
движение.
Подвижный блок совершает плоско-параллельное
движение.
9
![]() ,
,
здесь
![]() .
.
![]()
8 Тележка совершает поступательное
движение.
Тележка совершает поступательное
движение.
9
![]() ,
здесь
,
здесь![]() .
.
![]()
8 Каток совершает сложное движение:
поступательное вместе с тележкой
(переносное движение) и плоско-параллельное
относительно тележки (относительное
движение)
Каток совершает сложное движение:
поступательное вместе с тележкой
(переносное движение) и плоско-параллельное
относительно тележки (относительное
движение)
![]() ,
,
здесь
![]() ,
,![]() ,
,![]() .
.
![]()
8 Груз совершает прямолинейное движение
МТ.
Груз совершает прямолинейное движение
МТ.
9
![]() ,
здесь
,
здесь![]()
1 0
0![]()

10
Прежде, чем записать уравнения Лагранжа
второго рода, найдем частные производные
![]() :
:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
11 Уравнения Лагранжа второго рода:

12 Ответ: