

УП_Лабы_Оптимизация управления ТП
.pdf6. Порядок выполнения работы
Работа выполняется по двум заданиям.
Задание 1 выполняют студенты технологических специальностей
(2 ч.)
Задания 1и 2 выполняют студенты специальностей, связанных с автоматизацией технологических процессов (4 ч.).
ЗАДАНИЕ 1 1. Изучить инструкцию к выполнению лабораторной работы,
принципиальную электрическую схему, расположение элементов на лицевой панели установки.
2.Включить лабораторную установку, повернув переключатель ПК (при включении загорится сигнальная лампа "Лабораторная работа включена")
3.Установить универсальный переключатель УП-1 в положение "Ручное" или "Дистанц." и установить ИМ по УП ИМ в положение 50% путем подачи команд с помощью УП-2, ''Б" или "М". Дать прогреться в течение 10 мин.
4.Определить статическую характеристику объекта, выполнив для этого следующие операции:
а) установить положение вала ИМ по УП ИМ на 10%; б) дождаться установления постоянного значения температуры
нагревателя (изменение температуры не должно превышать 2 - 3°С/мин)
изафиксировать это установившееся значение температуры в журнале наблюдений;
в) повторить пункты а и б, изменяя положение исполнительного механизма через 10 % хода от 10 до 100% (точнее до момента отключения ИМ концевыми выключателем в крайнем максимальном положении);
г) по полученным экспериментальным значениям построить график статической характеристики объекта в координатах по осям:
X - положение вала ИМ в % хода (вход объекта); У - температура °С (выход объекта).
Примерный график, статической характеристики объекта показан на рис. 2.58.
5.На экспериментальной статической характеристике выделить линейную часть и найти середину линейного участка статической характеристики - центр опыта.
Определить диапазон хвх изменения входного параметра в
пределах линейной части статической характеристики.
6. Определить динамическую характеристику объекта управления, выполнив для этого следующие операции:
142

а) установить вал исполнительного механизма по указателю положения на середину интервала линейного участка статической характеристики объекта (≈50 % хода). Установку ИМ проводить в режиме дистанционного управления с помощью ключа УП-2 ;
б) после прекращения изменения выходной величины (окончания переходного процесса в объекте) с помощью ключа УП-2 изменить положение вала исполнительного механизма на 10÷15 % хода в сторону
увеличения хвх ;
Рис. 2.58. Статическая характеристика объекта управления
в) с момента изменения положения вала ИМ через 5÷10 с снимать и регистрировать показания электронного потенциометра КСП-3 до момента достижения нового установившегося значения температуры (2-3 мин);
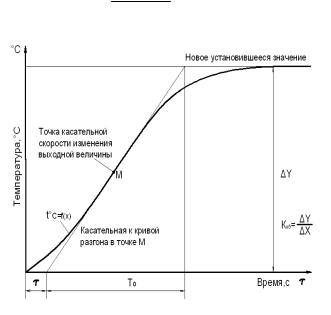
г) по полученным экспериментальным данным построить график полученной динамической характеристики (кривой разгона) и графическим методом определить динамические параметры объекта:
τз - время запаздывания, с;
Т0 - постоянную времени объекта, с;
К |
об |
= У |
- коэффициент передачи объекта, °С/ %хода ИМ. |
|
Х |
|
|
|
|
|
Примерный график кривой разгона и графическое определение параметровτ з , Т0 , Коб представлены на рис. 2.59.
7. Определить траекторию переходного процесса в системе регулирования, выполнив для этого следующие операции:
143
а) установить на ручном задатчике значение температуры в интервале 500÷600 °С;
б) поставить переключатель УП-1 в положение "Авт" и дождаться окончания процесса регулирования. Температура нагревателя должна установиться в заданном значении. Внимание! Шкала задатчика выполнена в %. Это значит, что весь размах шкалы измерительного прибора КСП-3 0÷1000 °С соответствует 100% шкалы задатчика. При установки заданного значения температуры это обстоятельство необходимо учитывать.
Пример: 1100°С---------100% 500°С----------Х%
Х = 500×100 ≈ 45,45% ; 1100
Рис. 2.59. Динамическая характеристика объекта(кривая разгона) и графический способ определения динамических параметров объекта по кривой разгона
в) после прекращения процесса регулирования (обе сигнальные лампы регулятора погашены) изменить значение температуры по
ручному задатчику на 50÷100°С - Узад ;
г) с начала момента изменения задания через 5÷10 с снимать и регистрировать значения температуры нагревателя по шкале
144

измерительного прибора КСП-3 до момента прекращения регулирования: сигнальные лампы длительное время погашены и регулируемая величина устойчива занимает заданное значение;
д) по полученным экспериментальным данным построить траекторию переходного процесса в системе регулирования в координатах:
Х – время; У - температура по шкале КСП-3, °С.
Примерный график переходного процесса показан на рис. 2.60.
Рис. 2.60. График переходного процесса САР при скачкообразном возмущении по заданию
е) определить качественные показатели переходного процесса в системе регулирования температуры τ р1,τ р2 , Уmax . Сделать выводы о качестве процесса регулирования.
ЗАДАНИЕ 2
1.Выполнить все пункты задания 1.
2.Установить с помощью ключа УП-2 вал исполнительного механизма в положение 50 % хода и добиться установления температуры нагревателя на значении, примерно соответствующем значению температуры по статической характеристике объекта при X = 50% хода ИМ.
3.С помощью ключа УП-2 в соответствии с планом изменения входного параметра X (см. рис. 14) устанавливать во времени требуемые
145

значения X в течении трех периодов, фиксируя при этом через каждые 20
-30 сек значения температуры нагревателя по шкале прибора КСП-3.
4.Нанести траекторию изменения температуры нагревателя по графическое изображение плана входных возмущающих воздействий как это изображено на рис. 2.57,а.
5.Повторить пункты 3,4 для планов изменения входного параметра, представленных на рис. 2.57 б, в, г.
6.По построенным траекториям изменения входного параметра определить:
а) амплитуду входных колебаний в соответствии с выражением:
В |
= |
∑(tmax |
− tmin ) |
(2.48) |
|
, |
|||
0i |
|
2n |
|
|
|
|
|
||
где tmax ,tmin - максимальное |
и минимальное |
значение |
||
температуры в течение одного периода изменения выходной величины (см. рис.14а); n - количество периодов (полных колебаний) выходной величины (n=3);
б) определить сдвиг фазы выходных колебаний по отношению к входным.
Определение производится следующим образом. Например, полный период колебаний входного параметра составляет 16 мин и это соответствует 360°. Значит, 1 мин оси времени составляет 22,5°:
360° = 180° = 90° = 45° = 22,5 град/мин. 16 8 4 2
Измеряются величины запаздывания выходных колебании У1 по
отношению ко входным колебаниям в 6-10 характерных точках (максимумы, минимумы, прохождения через 0) и рассчитывается среднее
значение ϕ1р . Например:
n
∑ϕ1
|
|
= |
i=1 |
= 2,3 мин, |
|
|
ϕ |
(2.49) |
|||||
|
|
|||||
1 |
n |
|
|
|||
|
|
|
|
|
||
где n – число точек измерения сдвига фазы ϕ1 (6-10 шт)
Затем определяется величина угла сдвига фаз по формуле:
ϕ(ω1) = 22,5× |
|
|
|
ϕ1 = 22,5× 2,3 = 51,75 ≈ 52 °; |
(2.50) |
||
146

в) вычисляется значение частоты колебаний входного сигнала с использованием соотношения:
6,28 радиан -16 мин;
ω1радиан -1 мин;
ω1радиан /мин=6,28/16=0,39 рад/мин; г) вычисляется значение модуля АФЧХ объекта по формуле:
А(ω ) = |
В01 |
= |
72,5°С |
=1,81°С / %хода , (2.51) |
|
|
|||
1 |
А0 |
|
40%хода |
|
|
|
|||
где А0 - амплитуда входных колебаний равная для всех случаев 40% хода ИМ.
7.Пункт 6 повторить для всех случаев реализации плана входных колебаний рис. 2.57б, 2.57в, 2.57г.
8.По полученным значениям построить графики АЧХ и ФЧХ:
Рис. 2.61. Изображение АЧХ (а) и ФЧХ (б), экспериментально полученных в ходе лабораторного исследования объекта
147

Графики АЧХ, ФЧХ строить в координатах:
АЧХ Х - частотаω |
ФЧХ Х - частотаω |
У - А(ωi ) |
У- ϕ(ωi ) |
Примерные графики АЧХ и ФЧХ приведены соответственно на рис. 2.61 а,б.
9. Построить годограф АФЧХ объекта управления для каждой фиксированной частоты ω1,ω2,ω3,ω4 . Построить часть годографа АФЧХ по имеющимся экспериментальным АЧХ и ФЧХ, помня, что при
ωi = 0 А(ω0 ) = Коб . Примерный график АФЧХ объекта показан на рис. 2.62.
Рис. 2.62. Построение годографа АФЧХ объекта по экспериментальным данным
10. Построить в соответствии с рекомендациями, изложенными в разделе 4 данной инструкции, годограф АФЧХ разомкнутой системы
W ( jω)рс для значений Ти, выбранных из диапазона:
Тиmin = 0,25Т0;Ти max =1,5 2Т0 ,
где Т0 - значение постоянной времени объекта, с (рекомендуемые значения 0,25Т0 ; 0,5Т0 ; Т0 ; 1,5Т0 )
11. Определить критические значения величин коэффициента
передачи регулятора К р.кр |
в соответствии с рекомендациями раздела 4 |
|||||||
для каждой W ( jω) |
|
(К |
|
|
= |
1 |
|
) (рис. 2.53), границы критических |
рс |
р.кр |
R |
|
|||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ki |
|
|
значений нанести на |
плоскость |
параметров настройки аналогично |
||||||
рис. 2.54. |
|
|
|
|
|
|
|
|
148
12. Определить запасы устойчивости по модулю и по фазе для каждой W ( jω)рс в соответствии с рекомендациями, изложенными в
разделе 4 данной инструкции.
Сделать выводы о влиянии величины Ти на показатели запаса устойчивости и уметь объяснить физический смысл сделанных выводов.
13. Определить оптимальные значения параметров динамической настройки регулятора в соответствии с рекомендациями, изложенными в
разделе 3 данной инструкции К р.опт (см. рис. 2.53)
Нанести на плоскость параметров динамической настройки
регулятора |
K р – |
Tи (аналогично рис. 2.54) |
границу обеспечения |
заданного |
запаса |
устойчивости. Определить |
оптимальные значения |
Кр.опт и Ти.опт .
14.Произвести моделирование работы системы с ПИ-регулятором
при |
оптимальных |
настройках |
К р.опт |
и |
Ти.опт |
на |
компьютеризированном стенде, и в соответствии с пунктом 8 задания 1 (повторив этот пункт) определить показатели качества переходного процесса в системе регулирования.
15. Сделать объективный вывод о качестве переходных процессов при различных способах определения динамический параметров и о трудоёмкости каждого из методов определения оптимальных значений параметров динамической настройки регуляторов по значениям динамических параметров объекта.
7.Содержание отчета
1.Краткие сведения о целях работы, устройстве лабораторной установки, принципиальная схема с описанием работы.
2.Статическая характеристика объекта управления и ее аппроксимация с помощью метода наименьших квадратов (уравнение теоретической линии регрессии).
3.Траектория кривой разгона, полученная в ходе выполнения работы на лабораторном стенде, а также динамические параметры объекта управления, полученные графическим методом по кривой разгона.
4.График траектории переходного процесса в системе управления с ПИ-регулятором с оценками показателей качества переходного процесса.
5.Графики изменения входных и выходных колебаний и определяемые параметры для построения АФЧХ.
6.Графики АЧХ, ФЧХ, АФЧХ объекта.
149

7.Иллюстрация графического определения критических и оптимальных параметров регулятора.
8.Графики границ критических значений и оптимальных в плоскости параметров настройки KP – TИ.
9.График траектории переходного процесса при моделировании системы управления с ПИ-регулятором (при
оптимальных параметрах настройки Кр.опт и Ти.опт) на компьютеризированное стенде с оценками показателей качества переходного процесса.
10.Выводы по работе.
6.Вопросы для самостоятельной подготовки
1.Как определяется запас устойчивости системы?
2.Что такое показатель колебательности?
3.Почему при построении годографа разомкнутой системы с ПИ-регулятором вектор А поворачивают на угол 90 градусов относительно вектора ОУ?
4.Что такое радиан?
5. Изобразить два годографа АФЧХ для объектов при Коб1 = Коб2 и при Т1 = 100 с, Т2 = 1 с.
6.Почему с увеличением ω значение А(τ) уменьшается?
7.Что такое точка (-1, j0), что физически означает -1 на Re(ω)?
8.Изобразить приближенный вид переходного процесса в контуре управления при значениях параметров настройки Кр и Тиз в соответствии с точками 1, 2, 3, 4 (рис. 2.63).
Рис. 2.63. Параметры настройки ПИ-регулятора
150

Лабораторная работа №5 Изучение работы ПИД-регулятора путем моделирования на
компьютеризированном стенде
Цель работы:
−изучить устройство, работу и принципиальную схему системы управления тепловым режимом с использованием ПИД-регулятора;
−снять статические характеристики объекта управления;
−снять динамические характеристики объекта управления;
−рассчитать параметры настройки ПИД-регулятора;
−построить кривую переходного процесса замкнутой САР;
−оценить качество регулирования с использованием ПИДрегулятора;
−произвести моделирование работы системы управления с ПИД-регулятором на компьютеризированном стенде.
1. Общие сведения о ПИД-законе регулирования
Регуляторы данного типа могут называться изодромными с предварением.
При формировании ПИД – закона регулирования, на вход нужно подавать три сигнала:
−сигнал, пропорциональный заданному значению Xзад;
−сигнал, пропорциональный текущему значению Xдейств;
−сигнал, пропорциональный скорости изменения регулируемого параметра при постоянном значении задания.
ПИД – регулятор по сути дела представляет собой параллельное соединение трех: П, И, Д - регуляторов.
Зависимость между входными и выходными параметрами ПИД – регулятора определяется выражением:
τ
Y(τ ) = Kpε (τ ) + Kp2 ∫ε (τ )dτ + Kp3
0
или
|
1 |
τ |
|
Y(τ ) = Kp ε (τ ) + |
∫ε (τ )dτ +TП |
||
|
|||
|
TИЗ 0 |
||
dε (τ )
(2.52)
dτ
dε(τ )
. (2.53)
dτ
151