

УП_Лабы_Оптимизация управления ТП
.pdfРис. 2.36. Схема релейного элемента с зоной нечувствительности и гистерезисом
Формирование значения переключающей функции σ(τ) на последующем интервале времени (τ+1) зависит не только от величины функции отклика δ(τ), но и от значения σ(τ) в текущий момент.
Если в текущий момент времени значение σ(τ)=+1, то:
−при δ(τ)> δ1 и при Δ< δ(τ)< δ1 принять σ (τ+1)=+1;
−при δ(τ)<Δ принять σ (τ+1)=0.
Если δ(τ)=0, т.е. ИМ остановлен, то:
−при δ1(τ)< δ(τ)< δ1(τ) принять σ(τ+1)=0;
−при δ(τ)> δ1(τ) принять σ(τ+1)=+1;
−при δ(τ)<-δ1(τ) принять σ(τ+1)=-1. Если в текущий момент времени σ(τ)=-1, то:
−при δ(τ)<-δ1(τ) принять σ(τ+1)=-1;
−при δ1(τ)< δ(τ)<Δ принять σ(τ+1)=-1;
−при δ(τ)>0 принять σ(τ+1)=0.
Направление формирования σ(τ) на рис. 2.36 показано стрелками. Поскольку все существующие исполнительные механизмы имеют
постоянную скорость, то для изменения скорости исполнительного механизма в сторону уменьшения в системе необходимо регулирование времени включения исполнительного механизма. Для улучшения качества регулирования управляющие команды подают через импульсное коммутирующее устройство (ИКУ).
Управляющий сигнал, формируемый трехпозиционным релейным элементом, через ИКУ подается на исполнительный механизм.
Введение в систему устройства ИКУ, позволяет изменять среднюю скорость ИМ в пределах:
112
0 < Kим |
< Kим |
, |
(2.36) |
|
СР |
MAX |
|
где KимMAX – максимально возможная скорость ИМ согласно
технической характеристике.
Динамические свойства и параметры исполнительного механизма импульсного действия идентифицируется интегрирующим звеном с передаточной функцией:
W |
( р) = |
1 |
|
, |
(2.37) |
|
|
||||
им |
Ти |
р |
|
||
|
|
|
|||
где Ти – время перекладки исполнительного механизма (время
движения от одного крайнего положения 0% хода до другого 100%). Предельные положения выходного вала ИМ ограничены
концевыми выключателями.
В модели задается скорость ИМ Ким =100% хода/Ти , тогда
текущее значение положения вала ИМ (входного параметра) вычисляется в соответствии с условием:
Uд (τ ) = Х = Хн +σКимτ . |
(2.38) |
Для моделирования работы системы управления с ПИ-регулятором на компьютеризированном стенде можно использовать любой язык программирования. В приложении Е приведен текст программы, моделирующей переходный процесс в системе регулирования температуры с использованием ПИ-регулятора, написанной на языке программирования VBA – Visual Basic for Applications.
3.Описание устройства лабораторной установки
Влаборатории «АСУ ТП» находится пять лабораторных стендов, в которых реализованы контуры регулирования различных параметров с использованием ПИ-закона регулирования. В данной лабораторной работе предлагается провести исследование на одном из стендов № 10, 11, 12 (по заданию преподавателя). Ниже приведено описание устройства каждого их этих стендов.
113
3.1. Стенд №10
Представляет собой реальный контур управления газодинамическим режимом промышленной печи.
Размещение оборудования на лицевой панели лабораторной установки представлено на рис. 2.37.
Установка представляет собой систему автоматического регулирования давления в рабочем пространстве металлургической печи. В качестве регулируемого параметра используется давление, отбираемое из рабочей камеры. Давление в рабочей камере создается потоком "топлива", подаваемого вентилятором через три условные горелки. На выходе установлен дымовой клапан (регулирующий кран), который определяет количество отходящих газов из печи. Расход топлива постоянен и определяется производительностью вентилятора пылесоса.
В качестве датчика давления используется дифманометр типа ДМ-6. В качестве вторичного прибора используется ВФС, рабочий диапазон которого составляет 0 ÷ 630 мм вод. ст. Заданное значение давления устанавливается с помощью 100 % реостатного задатчика ЗРУ24.
Регулятор РПИБ управляет движением исполнительного механизма МЭО. Положение выходного вала исполнительного механизма в % от максимального хода фиксируется указателем положения (милливольтметром). Сигнал на милливольтметр снимается с реостата обратной связи.
Питание датчика обратной связи осуществляется от блока дистанционного указателя положения (ДУП).
Выходной вал исполнительного механизма жестко соединен с установленным на воздухопроводе регулирующим краном, с помощью которого изменяется расход воздуха, сбрасываемого из рабочей камеры в атмосферу. Выбор способа управления исполнительным механизмом осуществляется с помощью универсального переключателя УП-1 «Авт.- Дистанц.».
Изменение направления движения исполнительного механизма при ручном управлении осуществляется универсальным переключателем УП-2 «Убавить – Прибавить». Включение установки в работу осуществляется с помощью переключателя «Работа».
Принципиальные электрические схемы регулирования давления и бесконтактного управления исполнительным механизмом представлены соответственно на рис. 2.38, 2.39. Изучение схем обязательно для студентов, обучающихся по специальности, связанной с автоматизацией.
114

Рис. 2.37. Лицевая панель щита: 1 - вторичный прибор ВФС; 2 - регулятор РПИБ
115

Рис. 2.38. Принципиальная электрическая схема регулирования давления
116

218.38

182.38
Рис. 2.39. Принципиальная электрическая схема бесконтактного управления исполнительным механизмом
117
3.2. Стенд №11
Представляет собой реальный контур стабилизации параметра объекта с обратно пропорциональной статической характеристикой.
Принципиальная схема установки представлена на рис. 2.40. Установка представляет собой систему автоматического регулирования температуры.
Вкачестве регулируемого параметра используется температура нагревательного элемента, представляющего собой фарфоровую трубку, на которую намотана нихромовая спираль. Питание спирали нагревателя
ивсей установки в целом осуществляется от сети переменного тока напряжением 220 В.
Нагревательная печь охлаждается потоком воздуха от пылесоса. Производительность пылесоса определяется напряжением его питания, которое изменяется с помощью лабораторного автотрансформатора (ЛАТРа). Движок ЛАТРа механически связан с валом двигателя исполнительного механизма ИМ 2/120 регулятора.
Чем больше напряжение питания, тем выше производительность пылесоса и тем меньше температура внутри нагревательной печи.
Вкачестве датчика температуры используется термопара градуировки ХК, расположенная внутри фарфоровой трубки толщиной 1-1,5 мм. В качестве вторичного прибора используется автоматический потенциометр КСП-3 градуировки ХА с пределами измерения 0 - 1100°С. Для улучшения качества регулирования шкала прибора расширена путем включения в цепь сигнала батареи, состоящей из двух термопар.
Рабочий диапазон прибора составляет 0 - 400°С. Заданное значение температуры устанавливается с помощью 10 % реостатного задатчика, встроенного в КСП-3.
Сигнал, пропорциональный отклонению регулируемого параметра от задания, снимается с реостатного датчика. Реостатный датчик питается напряжением переменного тока от измерительного блока И-Ш-62 регулятора РПИБ. Регулятор РПИБ с помощью реверсивного магнитного пускателя МКР-0-58 управляет движением исполнительного механизма ИМ 2/120. Положение выходного вала исполнительного механизма в % от максимального хода фиксируется указателем положения (милливольтметром). Сигнал на милливольтметр снимается с реостата обратной связи.
Питание реостата обратной связи осуществляется от измерительного блока регулятора через выпрямитель, собранный по мостовой схеме. Выходной вал исполнительного механизма жестко соединен с движком автотрансформатора, питающего пылесос, с помощью которого изменяется расход воздуха, идущего на охлаждение нагревателя. Воздух подается от вентилятора.
118

119
Рис. 2.40. Принципиальная электрическая схема установки (стенд №11)
Выбор способа управления исполнительным механизмом осуществляется с помощью универсального переключателя УП-1 («Авт.» – «Ручн.»), рис. 2.41. Изменение направления движения исполнительного механизма при ручном управлении осуществляется универсальным переключателем УП-2 («Откр.» – «Закр.»). Включение установки в работу осуществляется с помощью переключателя УП-3(«Вкл.» - «Выкл.»).
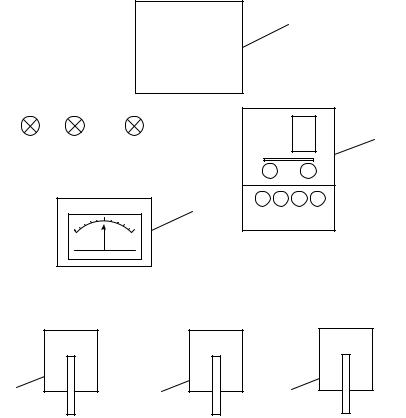
Рис. 2.41. Лицевая сторона панели лабораторной установки: 1 – потенциометр; 2 – регулятор; 3 – указатель положения регулирующего органа; 4 – переключатель выбора способа управления УП-1; 5 – переключатель дистанционного управления УП-2; 6 – переключатель подачи напряжения УП-3
120
3.3. Стенд №12
Стенд представляет собой контур стабилизации параметра объекта управления с прямо пропорциональной статической характеристикой.
Лабораторный стенд представляет реальный промышленный контур регулирования температуры в электрической нагревательной печи. Температура нагревательного элемента измеряется термопарой ТХК и регистрируется вторичным показывающим прибором Диск-250. Сигнал с прибора Диск-250 через показывающий миллиамперметр поступает на регулирующий прибор РП4-У.
Сигнал отклонения действительного значения температуры нагревателя от заданного значения (сигнал рассогласования) формируется специальным механическим устройством 10% задатчика, встроенным в КСП-З.
Регулирующий прибор РП4-У реализует ПИ-закон регулирования с гибкой отрицательной обратной связью, действующей только при наличии сигнала рассогласования. На вход регулятора приходят два токовых сигнала, соответствующих текущему значению регулируемого параметра и величине задания с Диск-250 и задатчика ЗУ-05 (через миллиамперметр) соответственно.
Управление исполнительным механизмом типа ИМ 2-120 осуществляется по бесконтактной схеме с использованием ПБР-2М (пускатель бесконтактный реверсивный однофазный). Выходной вал исполнительного механизма (ИМ) перемещает движок лабораторного автотрансформатора (ЛАТР) и тем самым изменяет напряжение питания нагревательного элемента (нихромовой спирали), изменяя его температуру.
Переключение режимов управления ИМ «Авт.» (автоматический), «Ручн.» (ручной) осуществляется переключателем УП-2. Управление движением ИМ в режиме ручного управления осуществляется с использованием кнопок "Б", "М" с взаимной механической блокировкой кнопок. Индикация положения выходного вала ИМ осуществляется дистанционным указателем положения ДУП-М, получающим сигнал с реостата обратной связи Roc, который установлен в исполнительном механизме ИМ-2/120. Включение установки осуществляется ключом УП-1.
Принципиальная электрическая схема контура регулирования представлена на рис. 2.42. Размещение оборудования на лицевой панели лабораторной установки представлено на рис. 2.43.
121