

51
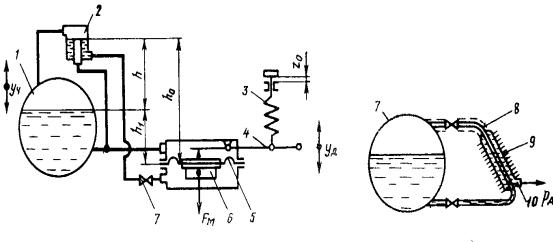
ством барабана, и на мембрану действует столб воды h1 . Сила, действующая на мембрану площадью F от перепада уровней h = h0 − h1, уравновешивается суммой сил от веса
груза 6 Gг и настроечной пружины 3. Уравнение статики
датчика
h ρ g F = Gг + a1 c ( z0 + z ) или y = k x ,
где ρ – плотность воды;
g – ускорение свободного падения; a1 – передаточный коэффициент;
c – жесткость пружины;
z – текущая деформация пружины;
z0 – предварительная затяжка пружины.
Грузом уравновешивают ≈ 80% силы от перепада уровней, а пружиной ≈ 20%.
Достоинство мембранных датчиков – высокая чувствительность и отсутствие тепловой инерционности. Давление в котле уравновешено. Влияние качки снижают путем настройки дроссельного клапана 7.
а
б
Рис. 26. Функциональные схемы датчиков уровня жидкости
Т е р м о г и д р а в л и ч е с к и й д а т ч и к у р о в н я (см. рис. 26, б) применяется на паровых котлах. Он состоит из стальной трубки 8, закрепленной внутри кожуха 9 с ребрами. Верхний конец трубки соединен с паровым, а нижний - с водяным пространствами пароводяного барабана 1.
52
Поэтому, согласно свойству сообщающихся сосудов, уровень воды в них всегда одинаков.
Пространство между трубкой 8 и кожухом 9, заполненное конденсатом, соединяется трубкой 10 с сигнализатором давления или исполнительным механизмом усилителя, управляющим питательным клапаном (на рисунке не показаны). Устанавливают датчик так, чтобы угол наклона трубки 8 был примерно равен 30 градусам и ее середина соответствовала уровню воды в барабане котла.
При изменении уровня воды в барабане изменяется соотношение между площадями поверхностей трубки 8, омываемыми водой и паром. Теплоотдача пара выше, чем воды при одинаковой их температуре, поэтому количество теплоты, передаваемое водой и паром через трубку конденсату, заполняющему кольцевое пространство датчика, будет различным. При понижении уровня воды, например, изменение количества теплоты, подводимой к конденсату, вызовет его испарение и пропорциональное повышение давления pд
на выходе из датчика. Недостаток датчика – значительная тепловая инерционность. На выходной сигнал влияет температура окружающей среды.
Вследствие простоты и надежности эти датчики используются при автоматизации небольших котлов.
П о л у п р о в о д н и к о в ы е р е л е у р о в н я ПРУ-5М предназначены для контроля уровня жидкостей в аппаратах стационарных и судовых установок (вода, аммиак, хладон) при давлениях до 20 МПа. Реле уровня состоит из первичного (ПП) и вторичного передающего (ПРП) преобразователей (рис. 27).
ПП и ПРП должны устанавливаться вне взрывоопасных помещений и соответствовать требованиям Регистра РФ, предъявляемым к устройствам управления судном, сигнализации, измерения и контроля неэлектрических величин для судов неограниченного района плавания.
В ПП перемещение металлизированного поплавка в поплавковой камере преобразуется в сигнал переменного тока с помощью индуктивных катушекL1 и L2 , включенных в