

127
а |
б |
Рис. 66. Характеристики И-регулятора
§ 7.3. Пропорционально-интегральное регулирующее воздействие (пропорционально-интегральный
регулятор)
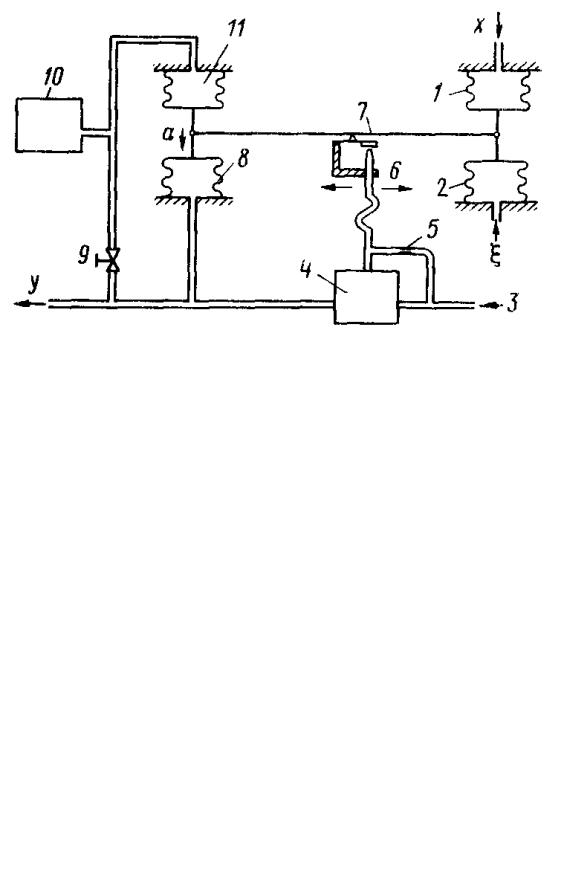
На рис. 67 представлена функциональная схема такого регулятора.
Пропорциональная составляющая формируется за счет сигнала, поступающего в полость сильфона отрицательной обратной связи 8.
V
Рис. 67. Функциональная схема ПИ-регулятора
128
Изменение выходного сигнала y1 по этой составляющей
пропорционально изменению входного сигнала X (см. раздел 7.2) y1 = kR X . Интегральная составляющая ПИ-
регулятора формируется за счет сигнала, поступающего в полость сильфона 11 через дроссель 9 (положительная обратная связь). Объем 10 играет роль аккумулятора сжатого воздуха и облегчает установку времени интегрирования Tu
регулятора дросселем 9. Изменение интегральной состав-
ляющей y2 выходного сигнала |
|
kR |
t |
|
y2 = |
∫x dt . |
|||
T |
||||
|
|
u 0 |
||
Эффект интегрального воздействия аналогичен эффекту ручной подстройки координаты задания после каждого изменения нагрузки. Полное изменение выходного сигнала определится согласно принципу суперпозиции как сумма составляющих процесса
1 |
t |
|
|
y = kR (x + |
|
∫x dt). |
(54) |
T |
|||
|
u 0 |
|
|
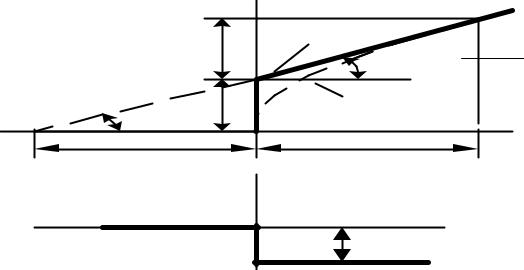
Переходной процесс идеального ПИ-регулятора при скачкообразном изменении входной координаты представлен на рис. 68 (в идеальном регуляторе не учитывается инерционность).
|
|
y |
|
|
|
|
|
|
y |
( t ) |
|
|
|
|
K R x 0 |
|
α |
= arctg |
K R x0 |
|
|
|
|
|
|||
|
|
|
|
Tu |
||
|
|
|
y |
′ ( t ) |
||
α |
K R |
x 0 |
|
|||
|
|
|
t |
|||
|
|
0 |
|
Tu |
|
|
|
T u |
x |
|
|
|
|
x 0 |
t |
Рис. 68. Переходной процесс ПИ-регулятора:
y(t) - идеальный регулятор; y′(t) - реальный регулятор

129
Интегральная составляющая ухудшает устойчивость системы и затягивает переходные процессы. Тем не менее, ПИ-регуляторы получили широкое применение в первую очередь для объектов, требующих большой перестановочной силы регулирующего органа.
§ 7. 4. Регулирующее воздействие по производной
Если знать в конкретный момент знак и значение производной по времени от отклонения регулируемой величины, то возможно, не дожидаясь определенного отклонения y ,
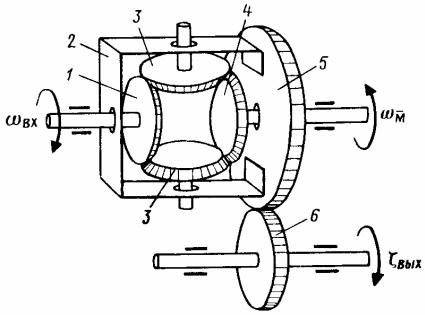
начать процесс регуляторного воздействия на объект. Это позволит существенно улучшить качество переходного процесса. В 1845г. братьями Сименс запатентован так называемый промышленный регулятор (рис. 69). Частота вращения ωвх вала двигателя через коническую 1 и сателлит-
ные 3 шестерни передается шестерне 4, установленной на валу маховика (вращение маховика с этим валом не связано). При установившемся режиме частоты ωвх =ωм и води-
ло 2 с шестернями 5 и 6 неподвижны. С изменением частоты вращения вала вследствие инерционности маховика возникает сила давления на зубья шестерни 4, пропорциональ-
ная ускорению dωdtвх . Эта сила поворачивает водило и шес-
терню 6 выходного вала регулятора на угол, пропорцио-
нальный скорости изменения ωвх |
ξвых = kR |
dωвх |
или |
|
dt |
||||
|
|
|
y = kR dxdt .
При соответствующей настройке удается получить астатическую характеристику регулирования частоты вращения машины. Однако в чистом виде регулирование по производной от отклонения (символическое обозначение Д или в латинской транскрипции D) не получило распространения.
130
Рис. 69. Функциональная схема регулятора с воздействием по производной от частоты вращения вала
§ 7. 5. Пропорционально-дифференциальное регулирующее воздействие
Воздействие по производной часто совмещают с пропорциональным регулирующим воздействием в так называемых пропорционально-дифференциальных (ПД) регуляторах. Это позволяет улучшить качество переходных режимов САР.
На рис.70 приведена функциональная схема ПДрегулятора. От схемы П-регулятора (см. рис. 62) она отличается наличием дросселя 12, расположенного перед сильфоном 8 обратной связи. С помощью дросселя устанавливается постоянная времени дифференцирования Tд регулято-
ра. Такой регулятор называют регулятором с упреждением. Перемещение правого конца рычага, несущего заслонку 7 пневмоусилителя, определяется сигналом рассогласования х −ξ на входе регулятора, а левого – изменением дав-
ления сжатого воздуха в полости сильфона 8. В статике, когда давление по обе стороны дросселя 12 выравнивается, регулятор работает как пропорциональный с коэффициен-
131
том усиления kR . В начальный момент переходного процес-
са, когда действие обратной связи блокировано дросселем 12, регулятор ведет себя как регулятор с коэффициентом усиления kд > kR . По мере уменьшения разности давлений
на дросселе 12 коэффициент усиления возвращается к значению kд.
Рис. 70. Функциональная схема ПД-регулятора (регулятор с упреждением)
Уравнение движения идеального ПД-регулятора (без-
инерционного) |
T |
|
dy |
+ y = k |
R |
x |
с ненулевыми начальны- |
|
dt |
||||||||
|
д |
|
|
|
|
ми условиями (при t = 0, y(0) = kд ). При ступенчатом входном воздействии x0 = const решение вышеприведенного уравнения с учетом ненулевых начальных условий имеет вид
|
|
|
|
) e− |
t |
|
|
|
|
|
|
y = (k |
д |
−k |
R |
Tд |
+k |
|
x |
0 |
. |
(55) |
|
|
|
|
|
|
R |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|