

студ ивт 22 материалы к курсу физики / kingsep_as_lokshin_gr_olkhov_oa_kurs_obshchei_fiziki_osnovy
.pdf452 |
Колебания в линейных системах |
[ Гл. 2 |
а из сравнения (2.95) и (2.97): |
|
|
|
% G |
(2.99) |
Равенства (2.98) и (2.99) лежат в основе спектрального анализа линейных колебательных систем. Они позволяют найти спектр вынужденных колебаний, т. е. либо набор коэффициентов (в дискретном случае), либо непрерывный спектр , если известен спектр внешней силы и частотная характеристика колебательной системы.
Для иллюстрации изложенного метода рассмотрим одну из
важных проблем, которая решается с помощью линейных фильтров — проблему селекции, которая возникает, в частности, при
приеме радиосигналов.
Пусть на вход колебательного контура приемника поступают сигналы двух радиостанций, ведущих передачи на несущих частотах 0 и 1. Это модулированные колебания
7- 1 0 1
и
7 2 1 2
Их спектры — %- и % . Требуется выделить полезный сигнал 7- и отсеять помехи (сигнал 7 ).
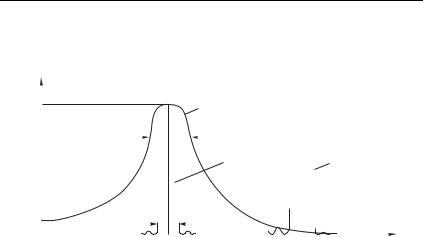
Требования, предъявляемые к частотной характеристике контура вытекают из соотношений (2.98) и (2.99). Во-первых контур необходимо настроить на несущую частоту сигнала 7- , т. е. резонансная частота контура р должна совпадать с 0: р 0. При этом добротность контура C должна быть достаточно большой, чтобы в пределы полосы пропускания контура 0C не попали спектральные компоненты помех 1, 1 0 & . С другой стороны, чтобы полезный сигнал был принят без искажений, необходимо, чтобы полоса частот полезного сигнала, определяемая характерным временем > изменения функцийи , описывающих закон модуляции ( > 2$ — соотношение неопределенностей), была меньше полосы пропускания контура ' .
Всем этим условиям удовлетворяет частотная характеристика, показанная на рис. 2.21 (показаны дискретные спектры %- и % сигналов 7- и 7 ).
Спектр выходного сигнала находим с помощью (2.99)
%- % G %- G р C %-
(спектральные компоненты на частотах 1 оказываются подавленными, поскольку % G 0).
Действительно, из выражения для частотной характеристики резонансного контура следует (при 0 1): G 1 при
2.8 ] Спектральный анализ линейных колебательных систем 453
р, G C при р и G 0 2 при р.
Поэтому первое слагаемое %- G %- C, а |
второе |
||||||||||||||||||||||||
% G % 0 2 при 0 пренебрежимо мало. |
|||||||||||||||||||||||||
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
H() |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Cs() |
|
|
|
|
|
Cn() |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
Рис. 2.21 |
1 |
|
|
|
|
||||||||||||||
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Таким образом, выходной сигнал оказывается отфильтрованным: он содержит лишь спектральные компоненты полезного сигнала 7- .
Демодуляция и квадратичное детектирование. После того как с помощью линейного фильтра осуществлена задача селекции — выделение из множества сигналов интересующего нас полезного сигнала (модулированного колебания 70 ) необходимо решить проблему демодуляции — преобразования высокочастотного колебательного процесса 7 (гармонические составляющие которого заполняют интервал частот 0 ' ' 0 в окрестности несущей частоты 0) в низкочастотные звуковые колебания и , содержащие непосредственно передаваемую информацию (речь, музыка, телевизионное изображение и т. п.). Такую трансфор-
мацию частот невозможно осуществить с помощью линейного фильтра. Мы рассмотрим метод квадратичного детектирования.
Идеальный квадратичный детектор имеет вольт-амперную характеристику 2 2. Демодулятор должен включать в себя также инерционное устройство, реагирующее на низкочастотные колебания, из которых состоят законы модуляции и, но не успевающее следить за колебаниями, происходящими с частотами порядка 0.
Пусть функция , описывающая закон амплитудной модуляции, содержит низкочастотные колебания
D

454 |
Колебания в линейных системах |
[ Гл. 2 |
Тогда модулированное колебание
7 0
содержит частоты 0 :
7 D #0 ,
а ток детектора (пропорциональный 72 ) есть
D #0 D #0
Он содержит комбинационные частоты вида 0 0 , которые распадаются на высокие частоты 2 0 и низкие частоты , за которыми только и может следить регистрирующий прибор.
Мы не будем далее интересоваться конкретным устройством демодулятора — квадратичного детектора и будем полагать, что сигнал на выходе детектора представляет собой квадрат входного сигнала, усредненный за некоторое время , определяемое инерционностью регистрирующего устройства:
|
|
|
1 |
2 |
|
|
|
|
|
|
7 |
2 |
|
||
7 D |
72 |
(2.100) |
|||||
|
|
|
|
|
|||
2
Будем полагать, что время усреднения удовлетворяет условию
2 |
|
|
>, |
(2.101) |
|
0 |
|||||
|
|
|
|||
где > — характерное время изменения функций и 7 , описывающих закон модуляции сигнала 7 .
Рассмотрим примеры.
1. На вход квадратичного детектора подано амплитудно-мо- дулированное колебание 7 0 . Найдем сигнал на выходе детектора
|
1 |
2 |
|
|
|
2 2 0 |
|
||
|
||||
|
|
2 |
|
|
Поскольку > (> — время, в течение |
которого функция |
|||
может заметно измениться), то на интервале усредненияфункцию 2 можно считать константой, равной значению 2 в середине интервала усреднения: 2 2
2.8 ] Спектральный анализ линейных колебательных систем 455
при 2 ' |
' 2. Тогда получаем |
|
|
|||||||||||||||||
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
2 |
1 |
|
|
|
|
|
|
|
|
||||
|
|
2 |
|
|
|
1 2 0 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
2 |
|
|||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
2 0 |
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
||||||||
2
Последнее слагаемое пренебрежимо мало по сравнению с первым, если интервал усреднения содержит большое число пери-
одов знакопеременной функции 2 0 |
(т. е. при $ 0). |
||||
Окончательно получаем |
|
|
|
|
|
|
1 |
|
2 |
, |
(2.102) |
2 |
|
||||
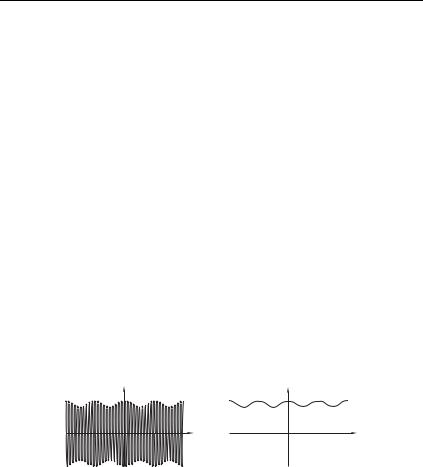
т. е. сигнал на выходе детектора содержит информацию о законе амплитудной модуляции входного сигнала.
На рис. 2.22 изображены колебания 7 и на входе и выходе квадратичного детектора при 0 1 .
f |
g |
t |
t |
à |
á |
Рис. 2.22
2. Пусть на вход квадратичного детектора поступает фазовомодулированное колебание
7 0 0
Сигнал на выходе детектора
2
|
1 |
|
2 |
|
2 |
|
|
0 |
|
0 |
|
|
2
Поскольку на интервале усреднения функция , описывающая закон фазовой модуляции, остается константой (равной
456 |
Колебания в линейных системах |
[ Гл. 2 |
значению в середине интервала усреднения0), то получаем
1 2
2 0 ,
т. е. закон фазовой модуляции оказывается утерянным при квадратичном детектировании.
Решить проблему можно, исказив определенным образом ам- плитудно-фазовые соотношения в спектре фазово-модулирован- ного колебания (превратив таким образом колебание, модулированное по фазе в амплитудно-модулированное колебание). После чего искаженный таким образом сигнал можно подать на вход квадратичного детектора.
Вернемся в качестве примера к модулированному колебанию с законом модуляции (при 1). Разложение в спектр этого колебания имеет вид (см. (1.45)):
0 |
|
|
|
|
|
|
|
7 0 0 |
|
|
0 |
|
|
|
|
2 |
2 |
|
|
||||
|
|
|
0 |
0 |
|
|
|
|
|
|
|
2 |
2 |
||
Прием без несущей. Рассмотрим прием без несущей. После устранения несущего колебания 0 0 получаем сигнал
7 0 |
|
0 |
|
|
|
|
|
|
|||||
|
|
0 |
|
|
0 |
|
|||||||
|
2 |
2 2 |
2 |
||||||||||
|
|
|
|
|
|
|
|
0 |
0 |
||||
На выходе квадратичного детектора имеем |
|
|
|
|
|
||||||||
1 |
2 |
|
2 2 |
|
|
|
|
||||||
|
|
|
|
|
|
||||||||
|
|
|
|
7 2 |
|
|
2 |
0 2 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
||||||
2
закон фазовой модуляции (правда в искаженном виде) выявлен: изменение выходного сигнала детектора происходит с удвоенной
частотой:
2 2
0 1 2 (2.103)
4
Прием с изменением фазы несущей. После изменения фазы несущего колебания на $ 2:
0 0 0 0 2

2.9 ] Задачи 457
имеем
7 0 0 2
0 |
0 |
|
0 |
0 |
|
|
|
|
2 |
2 |
2 |
2 |
|||
Теперь фазовые соотношения между всеми гармониками оказались такими же, как и в амплитудно-модулированном колебании (1.43). Действительно, после простых преобразований получаем
7 0 1 0
Мы преобразовали колебание, модулированное по фазе (с законом фазовой модуляции ), в амплитудно-модули-
рованное колебание 7 с законом модуляции
0 1
На выходе квадратичного детектора, согласно (2.102), получаем
1 |
|
2 1 |
2 |
1 |
2 1 |
2 |
2 |
, |
|||
|
|
|
|
|
0 |
|
|
0 |
0 |
||
2 |
2 |
2 |
|||||||||
т. е. переменная составляющая сигнала на выходе детектора воспроизводит без искажения закон фазовой модуляции исходного сигнала 7 .
Задачи
1.Вывести закон сохранения энергии для упругого маятника. Найти зависимость от времени кинетической и потенциальной энергии.
2.Выразить добротность колебательного контура с малым затуханием через его параметры , ; и .
3.Решить аналогичную задачу для пружинного маятника с параметрами
, и .
4.Покажите, что добротность осциллятора выражается через параметры0 и Æ с помощью равенства 9 0 2Æ.
5.Определите добротность колебательной системы, осциллограмма коле-
бания которой показана на рис. 1.15 а.
6. Найти частотные характеристики фильтров, изображенных на рис. 2.18.
|
|
|
|
|
|
Г л а в а 3 |
|
|
|
|
|
ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ. |
|
||||||
|
АНГАРМОНИЧЕСКИЙ ОСЦИЛЛЯТОР. |
|
|||||||
|
|
|
|
|
АВТОКОЛЕБАНИЯ |
|
|
||
|
|
|
3.1. Параметрические колебания |
|
|||||
Выше мы рассмотрели вынужденные колебания осциллятора, |
|||||||||
возбуждаемые меняющейся во времени внешней силой (внешней |
|||||||||
ЭДС, включенной в контур +, %, , либо силой, приложенной |
|||||||||
к маятнику). Внешнее воздействие на осциллятор может иметь, |
|||||||||
однако, совершенно иной характер и сводиться к периодиче- |
|||||||||
скому изменению со временем параметров самой колебательной |
|||||||||
системы (например, к изменению индуктивности колебательного |
|||||||||
контура либо длины маятника). Возбужденные таким образом |
|||||||||
колебания называются параметрическими, а сам механизм воз- |
|||||||||
буждения — параметрическим резонансом. |
|
|
|||||||
Прежде всего, попытаемся ответить на вопрос: можно ли |
|||||||||
раскачать уже имеющиеся в системе малые колебания, периоди- |
|||||||||
чески изменяя определенным образом какой-либо ее параметр. |
|||||||||
В качестве примера рассмотрим колебательный контур, в кото- |
|||||||||
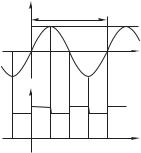
ром происходят малые свободные колебания. Изменения тока |
|||||||||
в его цепи происходят по гармоническому закону и показаны |
|||||||||
на рис. 3.1. Пусть внешнее воздействие сводится к изменению |
|||||||||
|
|
|
|
|
|
в определенные моменты времени индук- |
|||
I |
|
T |
|
|
|
тивности контура. |
|
|
|
Imax |
|
|
|
|
|
Закон, по которому происходит из- |
|||
|
|
|
|
|
|
менение |
индуктивности, |
показан |
на |
0 t1 |
t2 |
t3 |
t4 |
t |
рис. 3.1: в моменты, когда ток в катушке |
||||
|
|
|
|
|
|
индуктивности принимает максимальное |
|||
L |
|
|
|
|
|
значение : (моменты 1 |
и 3), индук- |
||
|
|
|
|
|
тивность скачком уменьшается на малую |
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
величину +, а в моменты, когда ток |
|||
|
|
|
|
|
|
равен нулю, индуктивность скачком вос- |
|||
0 |
t1 |
t2 |
t3 |
t4 |
t |
станавливается до прежнего значения + |
|||
|
Рис. 3.1 |
|
|
(моменты 2 и 4). Изменения + будем |
|||||
|
|
|
полагать малыми ( + +). |
|
|||||
|
|
|
|
|
|
|
|||
Заметим, что при скачкообразном изменении индуктивности |
|||||||||
(время |
>, в |
течение |
которого |
происходит изменение +, |
мало |
||||

3.1 ] |
Параметрические колебания |
459 |
всравнении с периодом свободных колебаний) магнитный поток
вкатушке сохраняется. В противном случае, если бы поток
изменялся на конечную величину за очень малое время >,
в катушке возникала бы ЭДС индукции инд > , что приводило бы к бесконечно большим токам в контуре. Учи-
тывая это обстоятельство, легко подсчитать изменение энергии контура ) (энергии катушки индуктивности) при скачкообразных изменениях индуктивности:
) +2 |
|
|
2 |
|
|
|
2 |
|
, |
|
2 |
2 2 + |
|||||||||
2 |
|
|
|
|||||||
где +: за время >.
Окончательное выражение для ) запишем в виде
2 |
|
) +2 + |
(3.1) |
Скачкообразное уменьшение индуктивности ( + ' 0) происходит в моменты времени, когда : : . При этом в контур вносится энергия ( ) & 0), равная
) +2 |
+ |
(3.2) |
2 |
|
|
Эта энергия черпается из внешнего источника: быстро уменьшить индуктивность можно, например, быстро увеличив длину катушки — растягивая ее, либо быстро извлекая из катушки железный сердечник. В любом случае для этого следует совершить работу: витки катушки притягиваются между собой амперовой силой, железный сердечник втягивается внутрь катушки. Итак, уменьшая индуктивность, мы совершаем работу, которая и идет на увеличение энергии контура, т. е. на раскачку колебаний. Скачкообразное увеличение индуктивности мы производим в моменты времени, когда ток в катушке равен нулю (моменты 2 и 4 на графике). При этом, согласно (3.1), ) 0; энергия не меняется, поскольку изменение индуктивности в этом случае происходит без совершения работы.
Поскольку подкачку энергии мы производим дважды за период, то полное увеличение энергии за период колебания равно
) :2 + |
(3.3) |
С другой стороны, в процессе колебаний энергия расходуется на джоулево тепло. Джоулевы потери за период
)т :2 ,
где :2 — среднее значение квадрата тока за период, которое связано с максимальным значением : известным соотноше-
нием :2 :2 2 (последнее справедливо, если контур обладает
460 Параметрические колебания. Ангармонический осциллятор [ Гл. 3
малым затуханием). Итак, |
|
|
|
|
)т |
+2 |
|
(3.4) |
|
2 |
||||
|
|
|
Условие параметрической раскачки колебаний — превышение подводимой энергии над потерями ) )т. С учетом (3.3) и (3.4) получаем +&2.
Последнее неравенство можно записать в виде
|
& |
|
Æ |
|
(3.5) |
|
|
||||
2 |
9 |
|
|
||
В последнем равенстве C — добротность колебательной системы. Если подкачку энергии осуществлять один раз за период, то для раскачки колебаний нужны вдвое большие относительные изменения индуктивности + +.
Аналогичным образом можно рассмотреть параметрическую раскачку колебаний маятника. Раскачиваясь на качелях (сгибая и выпрямляя ноги), мы по существу изменяем длину маятника.
Подумайте, каковы оптимальные моменты времени, в которые следует изменять длину маятника. Считая добротность маятника заданной, выведите условие параметрической раскачки его колебаний, аналогичное условию (3.5).
При выполнении неравенства (3.5) подводимая к колебательному контуру энергия превышает потери — амплитуда колебаний постепенно нарастает, т. е. имеет место параметрическое усиление колебаний. Естественно возникает вопрос: почему амплитуда не нарастает до бесконечности? Дело в том, что рано или поздно нарушается одно из важнейших условий, которые мы приняли при выводе уравнения, описывающего процесс колебаний, а именно, независимость параметров системы от амплитуды колебаний. В частности, омическое сопротивление контура мы полагали неизменным, не зависящим от величины протекающего тока. При достаточно больших токах это условие нарушается: сопротивление нарастает (резистор нагревается, растут джоу-
левы потери), поскольку растет температура.
|
q. |
Итак, если становится зависящим от вели- |
||
|
||||
|
|
|
чины протекающего тока : : , уравнение, |
|
|
|
|
описывающее процесс колебаний, становится |
|
|
|
|
нелинейным. |
|
|
|
|
Рост сопротивления при больших токах при- |
|
|
q |
|||
|
|
|
водит к нарушению неравенства (3.5). Рано или |
|
|
|
|
поздно наступает стационарный режим колеба- |
|
|
|
|
ний, при котором подводимая энергия в точно- |
|
|
|
|
||
Рис. 3.2 |
сти компенсируется джоулевыми потерями. Фа- |
|||
зовая траектория при установившемся, стацио- |
||||
|
|
|
||
нарном режиме колебаний показана на рис. 3.2: ток в катушке индуктивности / дважды за период скачкообразно нарастает