3832
.pdf
|
|
|
dz |
|
|
dx |
a(y)e |
b( y)dy |
|
|||||
|
|
|
dy |
|
dy |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||
и, подставляя в (4.24), получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx |
1 |
|
|
2 b( y)dy |
|
|||||||
|
|
|
|
|
|
|
|
(y)e |
0. |
|
||||
|
|
|
|
|
z |
|
|
|||||||
|
|
dy |
|
|
|
|
|
|
|
|
||||
Так как согласно (4.25) z |
x g ( y ) , то окончательно |
|
||||||||||||
|
dx |
|
(y)e2 b( y)dy |
|
. |
(4.26) |
||||||||
|
|
|
||||||||||||
|
dy |
|
|
|
g(y) x |
|
|
|||||||
Функциональные преобразования с последующим замораживанием обеих переменных С. А. Дробов /70/ применил по отношению к уравнению вида:
d 2 y |
a |
dy |
y |
d |
[ (y)] (y) A, |
|
dt |
dt |
dt |
||||
|
|
|
которое можно записать и так:
|
|
d |
|
|
|
|
|
|
|
|
|
|
[y ay (y)] y (y) A. |
||||||||
|
|
d |
||||||||
|
|
|
|
|
|
|
|
|
|
|
Вводя подстановку |
|
|
|
|
|
|
|
|
|
, получаем |
x y ay (y), dx |
d |
y dx |
||||||||
|
|
|
|
|
|
|
|
|
dy |
|
|
|
|
|
dx |
|
A y (y) |
|
(4.27) |
||
|
|
|
|
|
x ay (y) |
|||||
|
|
|
|
dy |
|
|||||
Уравнения (4.26) и (4.27) можно решить любым из приведенных выше методов.
В некоторых случаях решение дифференциального уравнения .(или изучение характера решения) оказывается более доступным, если предвари-
тельно совершен переход от заданного дифференциального уравнения к эк-
вивалентному интегральному. При таком подходе, естественно, возникают две самостоятельные задачи: 1) переход к интегральному уравнению, 2) ре-
шение интегрального уравнения.
Решение интегральных уравнений прямого отношения к решению дифференциальных уравнений не имеет. В нижеследующем изложении во-
просы решения интегральных уравнений не рассматриваются. Не рассматри-
ваются также методы решения дифференциальных уравнений на основе при342
менения интегральных преобразований (Лапласа, Меллина и др.), несмотря на то, что они используются в теории автоматического управления. Эти ме-
тоды подробно освещены в литературе (см. библиографический список).
Кроме того, методы решения интегральных уравнений широко освещены в литературе, например, /67, 71, 72/, поэтому в учебном пособии рассматрива-
ются лишь некоторые методы перехода от дифференциальных уравнений к интегральным, относительно широко используемые при анализе решений не-
линейных дифференциальных уравнений:
— общий метод перехода от линейных и параметрических дифферен-
циальных уравнений к интегральным;
— метод перехода от нелинейных дифференциальных уравнений к ин-
тегральным на основе использования функции Грина.
Напомним, что в интегральном уравнении искомая функция y(τ) нахо-
дится под знаком интеграла. Напомним также общий вид интегрального уравнения:
b |
(4.28) |
y( ) K( ,s) [y(s)]ds f ( ) |
a
Здесь y(τ) - искомая функция; K(τ, s) - ядро уравнения (считается из-
вестным); λ - численный параметр; f(τ) - «внешнее воздействие» (считается известным); ψ(z) - нелинейная функция (считается известной).
Если ψ(z) =z, интегральное уравнение называется линейным и записы-
вается в виде
b
y( ) K( ,s)y(s)ds f ( )
a
Если b=const, уравнение называется интегральным уравнением Фред-
гольма второго рода; если верхний предел переменный, т. е. b=τ, - интеграль-
ным уравнением Вольтерра второго рода.
343

В теории дифференциальных уравнений показывается /69/, что реше-
ние уравнения с правой частью f(τ) при заданных краевых (или начальных)
условиях можно представить в виде интегрального соотношения
b
x( ) G( ,s) f (s)ds,
a
в котором функция Грина G(τ,s) представляет собой решение соответствую-
щего однородного дифференциального уравнения при тех же краевых (на-
чальных) условиях.
В технических приложениях, связанных с линейными системами,
функцию Грина часто определяют не как решение однородного дифференци-
ального уравнения при заданных краевых или начальных условиях, а как ре-
шение неоднородного дифференциального уравнения с правой частью в виде дельта-функции и нулевых начальных условиях; при этом функцию Грина называют импульсной переходной характеристикой, а соответствующее ин-
тегральное соотношение — интегралом Дюамеля /73/.
Для дифференциального уравнения второго порядка
d2 x |
b |
dx |
a |
|
x f ( ), |
f ( ) 0 |
при 0 |
d 2 |
d |
|
|||||
0 |
|
0 |
|
|
|
импульсная переходная характеристика ( ) представляет собой решение уравнения
d 2 |
b |
d |
a ( ), |
0 |
d 2 |
|
|||
0 d 0 |
|
|||
при нулевых начальных условиях.
Искомое решение заданного уравнения в этом случае определяется ин-
тегральным соотношением (см. 2.3), называемым интегралом Дюамеля:
|
(4.29) |
x( ) ( s) f (s)ds. |
|
0 |
|
Теперь нетрудно перейти к интегральным уравнениям второго рода на основе нелинейных дифференциальных уравнений. Пусть дано нелинейное дифференциальное уравнение
345
d 2 x |
b |
dx |
[a |
|
a(x)]x f ( ), |
0. |
d 2 |
d |
|
||||
0 |
|
0 |
|
|
Перепишем его следующим образом:
d 2 x |
|
dx |
|
|
|
|
b |
|
a |
|
x f ( ) a(x)x. |
d 2 |
|
|
|||
0 |
d |
0 |
|
||
Используя интеграл Дюамеля в виде (4.29), приходим к следующему нелинейному интегральному уравнению:
x( ) ( s){f (s) a[x(s)]x(s)}ds.
0
Более подробно с методом перехода к интегральным уравнениям с ис-
пользованием функций Грина можно познакомится в монографии /74/
4.3.Фазовое пространство и фазовая плоскость
4.3.1.Фазовое пространство линейных систем
Как известно, состояние динамической /75/ системы n-го порядка в лю-
бой момент времени полностью определяется значениями n координат. Зна-
чения этих координат задают некоторую точку в n-мерном пространстве, по осям которого отложены координаты системы. Точка, характеризующая со-
стояние системы, называется изображающей точкой, а пространство — фа-
зовым пространством. При движении системы ее координаты изменяются, и
изображающая точка описывает некоторую кривую, которая называется фа-
зовой траекторией. Это движение характеризуется вектором фазовой скоро-
сти, который направлен по касательной к траектории в сторону движения изображающей точки. Длина вектора фазовой скорости определяется скоро-
стью изменения каждой из координат системы. Тогда движение изображаю-
щей точки по фазовым траекториям в фазовом пространстве можно рассмат-
ривать как геометрическую интерпретацию движения в динамической систе-
ме. В большинстве случаев при решении практических задач теории автома-
тического регулирования приходится иметь дело с уравнениями высоких по-
рядков. Для системы второго порядка, имеющей в качестве фазовых коорди346
нат собственно координату системы x и скорость ее изменения x, фазовые
траектории располагаются на фазовой плоскости, образуя фазовый портрет
системы.
Если порядок уравнения системы больше, чем второй, то вместо дву-
мерного фазового пространства рассматривают воображаемое n-мерное про-
странство, т. е. такое пространство, в котором для задания точки надо задать
n чисел.
Если данная система дифференциальных уравнений имеет периодиче-
ское решение, то этому решению в фазовом пространстве соответствует
замкнутая кривая.
На плоскости замкнутые кривые являлись границами областей. В про-
странстве же ограничивать определенные области могут поверхности, а не кривые. Поэтому замкнутая траектория по-прежнему соответствует периоди-
ческому решению рассматриваемой системы дифференциальных уравнений,
но не служит границей области.
В качестве иллюстрации приведем фазовые портреты линейных авто-
номных систем, описываемых уравнением второго порядка с постоянными параметрами, и установим связь между коэффициентами уравнения и харак-
тером фазовых траекторий. Предположим, что дифференциальное уравнение
d2 x |
a |
|
dx |
a x 0 |
(4.30) |
d 2 |
|
2 d |
1 |
|
|
описывает движение некоторой динамической системы. Рассмотрим подроб-
но случай, когда корни соответствующего характеристического уравнения λ1
и λ2 являются действительными и отрицательными, причем λ1 > λ2, Решение уравнения (4.30) имеет вид
|
1t |
2t |
|
|
x A1e |
|
A2e , |
|
|
|
|
(4.31) |
||
|
|
|
|
|
x A e 1t A e 2t , |
|
|||
1 1 |
2 2 |
|
|
|
где А1 и А2 - постоянные интегрирования, зависящие от начальных условий.
Уравнения (4.31 в параметрической форме задают семейство фазовых траек347

|
|
торий на фазовой плоскости ( x,x). Заметим, что при А2 = 0 величины |
x,x свя- |
заны зависимостью, и поэтому движение изображающей точки будет проис-
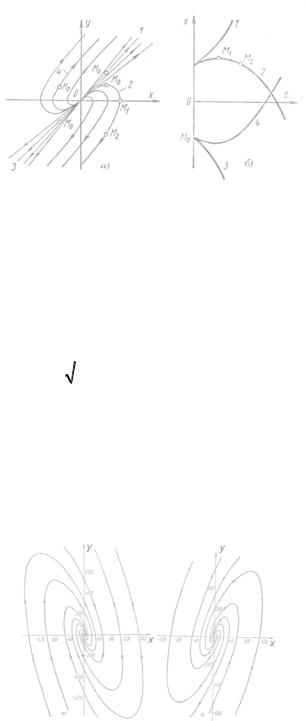
ходить по прямой I (рис. 4.10, а), заданной уравнением
x2 1x1 0. |
|
|
|
|
(4.32) |
Аналогично при А1 = 0 фазовая траектория становится прямой II, за- |
|||||
данной уравнением |
|
|
|
|
|
x2 2x1 0 |
|
|
|
|
(4.33) |
|
Так как λ1 < 0 и λ2 < 0, то траек- |
||||
тории стягиваются к началу коорди- |
|||||
нат. |
|
В |
силу |
того, |
что |
|
|
|
|
|
|
lim |
x |
|
при c 0 |
прямая I являет- |
|
|
t x |
1 |
|
|
|
||
|
ся касательной для любой фазовой |
||
Рис. 4.10. Фазовые портреты устойчивой |
траектории, за исключением прямой |
||
II. Общий вид фазовой плоскости для |
|||
апериодической системы |
|||
|
|
||
|
рассматриваемого случая представлен |
||
на рис. 4.10, а. Здесь и в дальнейшем стрелки на фазовых траекториях обо-
значают направление движения изображающей точки. В случае если корни характеристического уравнения отрицательны и равны, фазовый портрет системы имеет вид, представленный на рис. 4.10, б.
Среди фазовых траекторий имеется одна прямая, угловой коэффициент которой равен корню характеристического уравнения. Эта прямая, так же как и в предыдущем случае, является касательной для всех фазовых траекторий.
Фазовыми траекториями в рассмотренных случаях является семейство кри-
вых параболического типа. Для их получения исключим из (4.31) параметр t.
Введем новую переменную y dx |
и запишем (4.30) в виде системы двух |
|||||
|
|
|
|
|
dt |
|
уравнений при |
a |
2 |
, a |
2 |
2 : |
|
|
1 |
0 |
|
|
|
|
348

dy |
2 |
|
|
|
2 y 0 x, |
|
|
|
|
||
dt |
|
|
(4.34) |
|
|
||
dx |
y, |
|
|
dt |
|
|
|
|
|
|
где ω – частота собственных колебаний; ξ – показатель затухания, характери-
зующий интенсивность рассеивания энергии свободного движения.
Разделив первое уравнение системы (4.34) на второе, получим
dy |
2 y 02 x |
(4.35) |
|
|
|
|
|
|
y |
||
dx |
|
||
При отрицательных вещественных корнях характеристического урав-
нения и соблюдении условия
0; 2 |
02 , |
(4.36) |
уравнение фазовой траектории из решения уравнения (4.35) при помощи
подстановки |
y |
z в виде |
|
|
|
||
x |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
(y x) 1 |
C(y |
x) 2 , |
(4.37) |
|
|
|
|
1 |
2 |
|
|
где |
|
|
|
- корни характеристического уравнения; C –постоянная, |
|||
|
|
2 2 |
|||||
1,2 |
|
|
0 |
|
|
|
|
зависящая от начального состояния системы.
Уравнение фазовых траекторий (4.37) представляет собой уравнение
семейства кривых параболического типа, отличающихся друг от друга значе-
нием постоянной С.
Из рис. 4.10 видно, что при достаточно большом затухании (при кото-
ром удовлетворяются условия (4.36)) движение рассматриваемой системы является апериодическим, фазовые траектории проходят через начало коор-
динат, которое является точкой равновесия.
Точку равновесия, через которую проходят фазовые траектории, назы-
вают узлом; узел может быть устойчивым как в случае рис. 4.10, когда со-
стояние равновесия устойчиво, или неустойчивым, если состояние равнове-
сия неустойчиво. На рис. 4.11, а приведены фазовые траектории неустойчи-
349