

Механика. Рукин Ю.Б., Нилов В.А
.pdfЮ.Б. Рукин В.А. Нилов Р.А. Жилин
МЕХАНИКА
Учебное пособие
D
E
B
А 
C
Воронеж 2005
2
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
Ю.Б. Рукин В.А. Нилов Р.А. Жилин
МЕХАНИКА
Утверждено Редакционно-издательским советом университета в качестве учебного пособия
Воронеж 2005
3

УДК 531.8 – 621.01
Рукин Ю.Б., Нилов В.А., Жилин Р.А., Механика: Учеб. пособие. Воронеж: Воронеж. гос. техн. ун-т, 2005. 193 с.
В учебном пособии рассматриваются основные вопросы дисциплин, входящих в курс «Механика»: «Теория механизмов и машин», «Сопротивление материалов» и «Детали машин».
Издание соответствует требованиям Государственного образовательного стандарта высшего профессионального образования по направлению 140400 «Техническая физика», специальности 140401 «Техника и физика низких температур», дисциплине «Механика».
Пособие предназначено для студентов третьего курса очной формы обучения.
Учебное пособие подготовлено на магнитном носителе в текстовом редакторе MS WORD 2000 и содержится в файле МЕХАНИКА НТ.doc.
Табл.2. Ил. 121. Библиогр.: 22 назв.
Научный редактор канд. техн. наук, доц. Б.Б.Еськов Рецензенты: кафедра строительных и дорожных машин
ВГАСУ (зав. кафедрой д-р техн. наук, проф. П.И. Никулин); д-р физ.-мат. наук, проф. В.Н.Нечаев
Издаѐтся по решению редакционно-издательского совета Воронежского государственного технического университета
Рукин Ю.Б., Нилов В.А., Жилин Р.А.,
2005
Оформление. Воронежский государственный технический4 университет, 2005
ВВЕДЕНИЕ
Выписка из Государственного образовательного стандарта высшего профессионального образования требований к минимуму содержания и уровню подготовки инженера (специалиста) направления 140400 – «Техническая физика» по специальности 140401 – «Техника и физика низких температур» ОПД.Ф.03 Механика – 130:
«Машины и механизмы; кинематический и силовой анализ, взаимозаменяемость, передачи механического движения, проектирование передач; основные понятия о системах автоматизированного проектирования; валы и оси; нагрузки, расчетные схемы; подшипники качения и скольжения; механизмы для передачи движения в герметизированное пространство; поршневые компрессоры и детандеры; мембранные компрессоры; методы расчета сосудов и фланцевых соединений; ременные передачи; разъемные и неразъемные соединения; муфты, их подбор и конструирование».
Предмет «Механика» состоит из разделов: «Теория механизмов и машин», «Сопротивление материалов» и «Детали машин». В данном пособии также рассмотрены некоторые вопросы дискетного моделирования, реализуемые в современных системах автоматизированного проектирования.
1.СТРУКТУРА МЕХАНИЗМОВ
1.1.Основные понятия и определения
втеории механизмов и машин
Машина состоит из отдельных механизмов, а механизм состоит из отдельных деталей. Одни из деталей приняты за неподвижные, а другие движутся относительно них. Так, в двигателе самолета или машины за неподвижные принимаются те детали, которые соединены жестко с корпусом самолета или машины. Это корпус двигателя, подшипники коленчатого вала.
3
Подвижные детали – коленчатый вал (кривошип), шатуны, поршни и другие детали.
Каждая подвижная деталь или группа деталей, образующая одну жесткую подвижную систему тел (пример – шатун с разъемными крышками), носит название подвижного звена механизма. Например, вал, шатун, ползун – это подвижные звенья механизма. Все неподвижные детали образуют одну неподвижную систему тел, называемую неподвижным звеном или стойкой. Например, корпус самолета, с ним жестко связан корпус двигателя – все это одно звено – стойка. В любом механизме всегда есть одно неподвижное звено и одно или несколько подвижных звеньев. Следовательно, механизм это есть совокупность неподвижного и подвижных звеньев.
Из подвижных звеньев в механизме необходимо выделить входные и выходные звенья.
Входным звеном называется звено, которому сообщается заданное движение, преобразуемое механизмом в требуемое движение других звеньев.
Выходным звеном называется звено, совершающее движение, для выполнения которого предназначен механизм. Все остальные звенья называются соединительными или промежуточными.
Подвижные звенья соединены между собой и со стойкой так, что возможно движение одного звена относительно другого.
Соединение двух звеньев, допускающее их относительное движение, называется кинематической парой. Например, ки-
нематическими парами являются места соединения коленчатого вала с корпусом, кривошипа и шатуна, шатуна и ползуна. Поверхности, линии, точки, по которым соприкасаются звенья,
называются элементами кинематической пары.
Связанная система звеньев, образующих кинематические пары, называется кинематической цепью.
В основе всякого механизма лежит кинематическая цепь, но не всякая кинематическая цепь является механизмом. Ки-
4
нематическая цепь, обладающая определенным заданным движением, является механизмом.
1.2. Классификация кинематических пар.
Классификацию кинематических пар можно провести по числу степеней свободы и по числу условий связи.
Числом степеней свободы механической системы назы-
вается число независимых перемещений.
Твердое тело имеет в пространстве шесть (рис. 1.1) независимых движений: три вращательных и три поступательных,
т.е. Н – число степеней свободы такого тела равно 6, Н = 6.  z
z
x |
y |
Рис. 1.1
Если тело (звено) соединить подвижно с другим телом (звеном), то на движение этих звеньев будут наложены ограничения, которые носят названия условий связи в кинематической паре. Число условий связи в кинематической паре зависит от способа соединения звеньев в кинематические пары. Число условий связи S изменяется от 1 до 5, т.е. 1 S 5. Если на тело налагается шесть условий связи, то тело лишается возможности двигаться.
5

Степень свободы звена в кинематической паре можно определить как H = 6 – S. Число степеней свободы звена в паре может меняться от 1 до 5, т.е. 1 H 5.
Все кинематические пары делят на пять классов. Класс кинематической пары определяется числом условий связи, наложенных на относительное движение звеньев. Класс пары может быть определен и числом степеней свободы. Рассмотрим примеры пяти классов кинематических пар.
Создадим кинематическую пару, положив шар на плоскость. Этим лишим шар одного из шести возможных движений, шар не может перемещаться по оси z, т.е. на его движение наложено одно ограничение (одно условие связи). Такая пара названа парой 1 класса или пятиподвижной (рис. 1.2).
z
1
2
H=5; S=1
y
 x
x
Рис. 1.2
Цилиндр на плоскости. Н=4; S=2 – пара II класса или че-
тырехподвижная (рис. 1.3).
6

y
2 |
1 |
|
z
x
Рис. 1.3
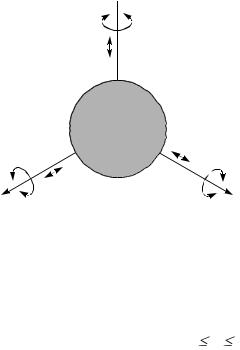
Сферическая пара. Н=3; S=3 – пара III класса или трехподвижная (рис. 1.4).
y
1
1
z
2 |
2 |
|
x
Рис. 1.4
7

Цилиндрическая пара. Н=2; S=4 – пара IV класса или двухподвижная (рис. 1.5).
 y
y
2
1 |
z |
|
|
|
2 |
|
1 |
 x
x 
Рис. 1.5
Поступательная пара. Н=1; S=5 – пара 5-го класса, од-
ноподвижная поступательная (рис. 1.6).
y 
2
1 |
z |
2
1
 x
x
Рис. 1.6
8