

m0955
.pdfНаука и молодежь СГУПСа в третьем тысячелетии
Основные правила перевозки таких грузов регулируются Инструкцией по перевозке крупногабаритных и тяжеловесных грузов автомобильным транспортом по дорогам РФ.
Согласно, данного документа:
-пропуск таких грузов разрешается по дорогам, исходя из несущей способности дорожных одежд и сооружений;
-перевозка крупногабаритных и тяжеловесных грузов 2 ка-
тегории по населенным пунктам осуществляется в период наименьшей интенсивности движения, а вне населенных пунктов
–в светлое время суток;
-при согласовании разрешения Госавтоинспекция определяет необходимость и вид сопровождения, в том числе и автомобилем ГАИ. Ориентировочная цена сопровождения– от 10 р./км за весь маршрут следования;
- скорость движения не должна превышать по дорогам 60 км/ч, а мостовым сооружениям – 15 км/ч.
Во время перевозки запрещается: отклоняться от установленного маршрута, превышать указанную в разрешении скорость движения, осуществлять движение во время гололеда, а также при метеорологической видимости менее 100 м и др.
Следовательно при выборе тип подвижного состава необходимо исходить из следующего:
-где проходит маршрут (по равнинной или горной местности и т.д.);
-технические возможности автопоезда. Они должны быть максимально приближенными к весогабаритным характеристикам груза.
В настоящее время перевозчики могут использовать для перевозки авто-платформы и тралы различных модификаций. Для примера приведу часть модельного ряда одного из производителей – табл. 2.
Характеристика авто-платформ и тралов |
Таблица 2 |
||||
|
|
||||
|
|
|
|
|
|
Технические |
|
Модель тралла |
|
|
|
характеристики |
9942D3 |
994271 |
9942D4 |
|
9942L3 |
Масса перевозимого |
42 000 |
60 000 |
57 000 |
|
42 000 |
груза, кг. |
|
||||
|
|
|
|
|
|
71
Сборник научных статей аспирантов и аспирантов-стажеров
Продолжение табл. 2
Технические |
|
Модель тралла |
|
||
характеристики |
9942D3 |
994271 |
9942D4 |
9942L3 |
|
Допустимая полная |
54 000 |
71 000 |
75 000 |
53 000 |
|
масса, кг. |
|||||
|
|
|
|
||
Масса снаряженного |
12 000 |
11 000 |
18 000 |
11 000 |
|
прицепа, кг. |
|||||
|
|
|
|
||
Нагрузка на седель- |
|
|
|
|
|
ное устройство тяга- |
18 000 |
12 000 |
27 000 |
17 000 |
|
ча, кг. |
|
|
|
|
|
|
|
23 500 – |
|
|
|
Нагрузка на дорогу |
36 000 |
1 ая тел. |
48 000 |
3600 |
|
через шины, кг. |
35 500 – |
||||
|
|
|
|||
|
|
2 ая тел. |
|
|
|
Количество |
3/12 + 2 зап. |
4/16+2 зап. |
2+2 поворот |
3/12 + |
|
осей/колес, шт. |
/16+2 зап. |
2 зап. |
|||
|
|
||||
Погрузочная высота |
650 |
1790 |
650 |
930 |
|
платформы, мм. |
|||||
|
|
|
|
||
Ширина платформы, |
2500 |
2500 |
3000 |
2500 |
|
мм. |
(3000) |
(3200) |
(3500) |
(3000) |
|
Длина рабочей плат- |
6500 |
до 3600 |
6500 |
11 100 |
|
формы, мм. |
|||||
|
|
|
|
||
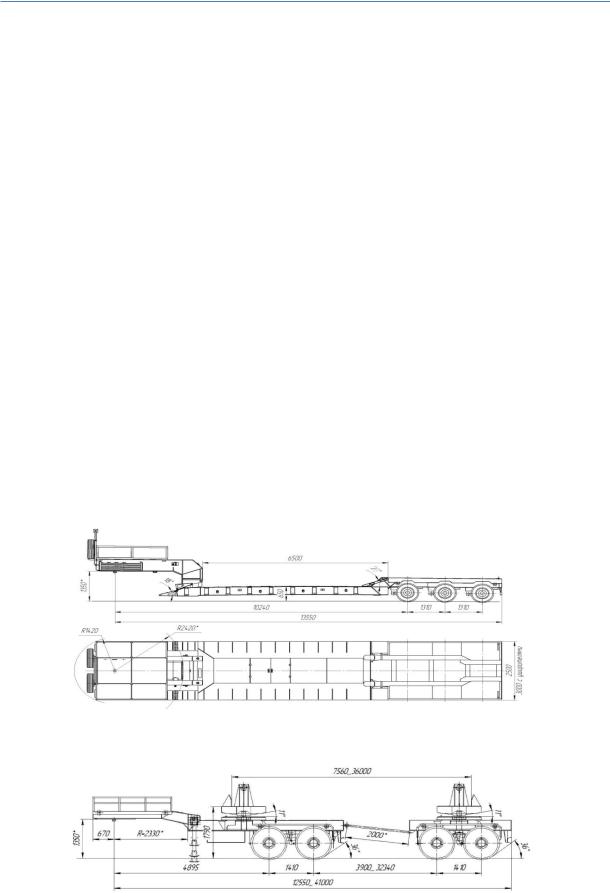
Рис. 6. Трал модели 9942D3
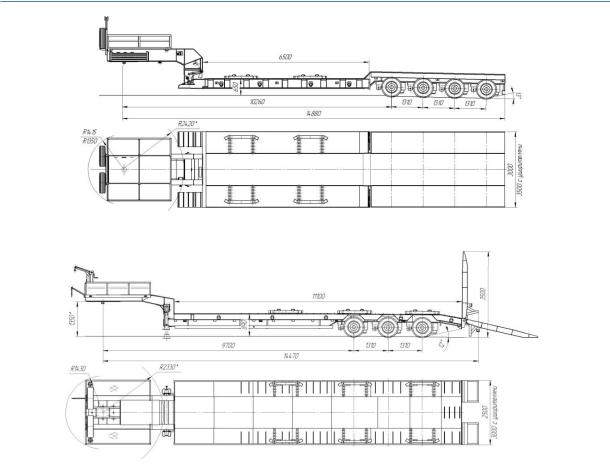
Рис. 7. Трал модели 994271
72
Наука и молодежь СГУПСа в третьем тысячелетии
Рис. 8. Трал модели 9942D4
Рис. 9. Трал модели 9942L3
Как видно из данной таблицы тралы отличаются: грузоподъемностью (от легких до свертяжелых), количеством осей, высотой грузовой площадки, конструкцией рамы и дополнительному оборудованию установленному на них (управляемые оси, уширители, различные лебедки и др.).
Отдельно необходимо отметить, что в эксплуатации есть прицепы модульного типа. Модульность конструкции заключается в том, что прицепы-модули можно жестко соединять задними и боковыми сторонами, образовывая тем самым новое транспортное средство, грузоподъемность которого равна сумме грузоподъемностей входящих в него прицепов-модулей. Основу системы транспортных средств модульной конструкции составляют двух-, трех-, четырех- и шестиосные прицепы-модули, называемые базовыми моделями. Грузоподъемность такой конструкции может доходить до 2000 т.
При выборе тралов так же необходимо учитывать, что для его транспортировки в составе автопоезда потребуется подо-
73

Сборник научных статей аспирантов и аспирантов-стажеров
брать тяговую единицу. В качестве тягачей чаще всего -ис пользуются седельные тягачи. Подбор тягача производится с учетом массы перевозимого груза и конструкции гуснека.
Итак обобщая данную информацию можно сделать следующий вывод выбор подвижного состава зависит от:
–характеристики груза (масса, габаритные размеры, особенности конструкции);
–характеристики транспортного средства (грузоподъемность, высота погрузочной площадки, специфика размещения и крепления груза);
–срочности перевозки (разная допустимая скорость движения; особенности пропуска; срок подвода вагона под погрузку).
Ошибки в выборе вагона могут привести:
–к удорожанию перевозки. Так, например, использование транспортеров с более низкой погрузочной площадкой может как снизить (в верхней зоне) так и повысить (в нижней зоне) степень негабаритности, а это может значительно изменить размер провозной платы. Применение транспортеров с большим количеством осей приводит к увеличению стоимости;
–повреждению груза и подвижного состава, а значит будет влиять на безопасность движения;
–отказу в перевозке, из-за невозможности перевозки грузов с высокими степенями негабаритности, особенно в верхней и нижней зонах негабаритности;
–излишней длительности цепи поставки товара.
Библиографический список
1.Макаренко М.В. «Анализ возможностей железнодорожного транспорта при перевозке крупногабаритных и тяжеловесных грузов» // Наука и молодежь СГУПСа в третьем тысячелетии: сб. науч. ст. аспирантов и ас- пирантов-стажеров / Сиб. гос. ун-т путей сообщ. – Новосибирск: СГУПС.
Вып. 2. 2013. 253 с.
2.Троицкая Н.А. Транспортно-технологические схемы перевозок отдельных видов грузов: учеб. пособие для вузов по спец. «Орг. перевозок и упр. на трансп. (автомоб. трансп.)» / Н.А. Троицкая, М.В. Шилимов. М.: Кно Рус, 2010. 231 с.
Научный руководитель канд. техн. наук, доц. М.А. Зачешигрива
74

Наука и молодежь СГУПСа в третьем тысячелетии
В.В. Михайлов
(факультет «Строительство железных дорог»)
ОЦЕНКА СОСТОЯНИЯ ПУТИ ПО ДИНАМИЧЕСКИМ ПОКАЗАТЕЛЯМ
В настоящее время состояние рельсовой колеи оценивается по геометрическиМПараметрам: просадкам, перекосам, отступлениям по уровню и стрелам изгиба колеи в плане. В последние годы состояние пути в кривых оценивается также по динамическим показателям: непогашенному центробежному ускорениюαнп в каждой точке x, рассчитываемое по усредненным значениям кривизны пути R(x) и возвышения наружного рельсаh(x), а также скорости изменения непогашенного ускорения ψ(x), определяемое по данным αнп в соседних точках. При этом рассматриваются не мгновенные, а усредненные значения кривизны на скользящем отрезке пути длиной 50 м, а значения уровня на отрезке 40 м. Полученные значения αнп и ψ сравниваются с допустимыми значениями[αнп] и [ψ], и по ним определяется допускаемая скорость движения.
Суть предлагаемого подхода заключается в том, что значения αнп и ψ следует определять в сечениях пути с шагом 2,5 м по мгновенным значениям кривизны пути и возвышения наружного рельса. Уточнив значения [αнп] и [ψ], рассчитывать в каждой точке рамные силы, коэффициент запаса устойчивости колеса на рельсе.
Кривизна пути в плане определяется по изменению угла поворота скользящей в горизонтальной плоскости вдоль пути хорды, равной базе. Угол поворота рассчитывают по курсовому углу (азимуту продольной оси тележки).
Программно-математическое обеспечение позволяет КВЛ-П в автоматическом режиме получать, а также оценивать и анализировать состояние кривых, благодаря чему становится возможным последовательное решение задач установления скоростей движения.
Величина непогашенного ускорения рассчитывается в каждом i-м сечении кривой с шагом 2,5 м:
aнi = |
V 2 |
- 0,0061× hi , |
(1) |
max |
|||
3,62 × R |
|||
|
i |
|
|
75

Сборник научных статей аспирантов и аспирантов-стажеров |
|
||||
где Vmax |
– установленная скорость движения в кривой, км/ч; Ri – |
||||
радиус |
в i-ом сечении кривой, м; |
hi – возвышение |
наружного |
||
рельса в i-ом сечении кривой, мм. |
|
|
|||
Скорость изменения непогашенного ускорения, измеряемого |
|||||
по записи уровня и стрел, на величину ∆l = 2,5 м: |
|
||||
|
yi = |
DaнiVmax |
= (aнi |
- aн(i-1 ))Vmax . |
(2) |
|
|
||||
|
|
3,6Dl |
9 |
|
|
В качестве исходных данных по состоянию пути используются цифровые данные о стрелах изгиба колеи в плане и возвышению наружного рельса по всей длине кривой, состояние которой необходимо оценить по динамическим показателям, с дискретностью 2,5 м. Эти данные извлекаются непосредственно из программы обработки информации КВЛ-П по результатам его конкретного прохода по обследуемому участку.
Располагая данными о стрелах изгиба колеи в планеfi (при длине хорды 20 м), мгновенное значение радиуса кривой в каждой точке можно определить как
|
|
|
|
|
Ri |
= |
50000 |
, |
|
|
(3) |
|
|
|
|
|
|
fi |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
где fi |
– стрела изгиба в i-ой точке, мм. |
|
|
|
||||||||
Уравнения квазистатики (сумма проекций на осьy и сумма |
||||||||||||
моментов относительно точки О) имеют следующий вид: |
|
|||||||||||
ì |
|
|
|
|
|
|
|
|
|
|
|
|
ïH н |
+ H в |
- H н |
- H в |
+ F -Y × cos g + DH - F xy ×sin g = 0 |
|
|||||||
ï |
1 f |
1 f |
2 f |
2 f |
нп |
|
|
тр |
|
|
|
|
ï |
н |
в |
|
н |
в |
|
|
æ |
l |
ö |
|
|
í(H1 |
+ H1 |
)× d1 + (H2 + |
H2 )× d2 |
+ (Fнп + DH )×ç x - |
|
÷ - |
, (4) |
|||||
2 |
||||||||||||
ï |
|
|
|
|
|
|
|
è |
ø |
|
||
ï |
é(x + b)× cos g - |
S |
|
ù |
|
|
- F xy × |
é S |
× cos g + (x + b)×sin g |
ù |
|
||
ï-Y |
×sin g |
+ M |
|
= 0 |
|||||||||
|
ú |
тр |
ê |
|
ú |
||||||||
î |
ê |
2 |
|
|
тр |
|
2 |
|
|
||||
ë |
|
û |
|
|
|
|
ë |
|
û |
|
|||
где H1нf , H 2н f , H1вf |
, H 2в f , |
|
H1н,2 , |
H1в,2 |
– |
силы трения в уровне по- |
|||||||
верхности катания колеса по рельсу(здесь цифра «1» или «2» в нижних индексах обозначает номер оси экипажа, буква «f» поперечное направление; буква «н» в верхнем индексе соответствует наружному колесу, а буква «в» внутреннему); Y – направляющее
76
Наука и молодежь СГУПСа в третьем тысячелетии
усилие; g – угол набегания направляющего колеса на рельс; DH – поперечная сила, возникающая от действия продольной силы в поезде; – радиусы-векторы точек скольжения бандажей колес
(соответственно первой и второй оси экипажа) по рельсу; x – полюсное расстояние (расстояние от первой оси экипажа до полюса его поворота); l – жесткая база экипажа; b – забег направляющего колеса; S – ширина рельсовой колеи по осям рельсов (S = 1600 мм);
M тр – момент трения в опорном устройстве; Fтрxy – проекция си-
лы трения, возникающей в точке набегания направляющего колеса на рельс, на плоскость катания xy.
Радиусы-векторы точек скольжения бандажей колес по рельсу d1 и d2 определяются по формулам:
d |
= |
|
æ |
S ö2 |
; |
|
(5) |
|
x2 + ç |
÷ |
|
||||||
1 |
|
|
è |
2 ø |
|
|
|
|
|
|
|
|
|
|
|||
d2 = |
|
(l - x) |
2 |
|
æ S |
ö |
2 |
(6) |
|
|
+ ç |
÷ |
. |
||||
|
|
|
|
|
è 2 |
ø |
|
|
Угол между направляющей силой Y и осью координат y равен углу набегания направляющего колеса на рельс γ и находится по формуле
g = arcsin |
x + b |
. |
(7) |
||
|
|||||
|
|
|
R |
|
|
Забег гребня колеса определяется по выражению |
|
||||
b = x |
r |
tg b, |
(8) |
||
|
|||||
|
R |
|
|||
где b = 65o – осредненное для изношенного гребня значение угла наклона его рабочей поверхности к горизонтали; r радиус вагонного колеса, равный 475 мм.
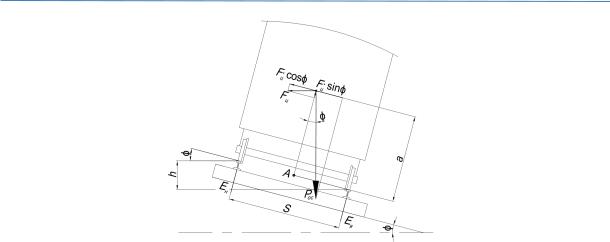
Рассмотрим равновесие экипажа в поперечном профиле при его движении в кривой (рис. 1).
77
Сборник научных статей аспирантов и аспирантов-стажеров
Рис. 1. Поперечный профиль положения экипажа в кривой
Составив уравнение моментов относительно точкиА и уравнение проекций сил на вертикальную(относительно экипажа) ось, получим систему уравнений равновесия:
ì |
|
|
|
|
|
|
|
S |
|
||
ï(Fц |
×cos j - |
Pос ×sin j) |
× a = (Eн |
- Eв )× |
|
|
|
||||
2 , |
(9) |
||||||||||
í |
|
+ E |
- F |
×sin j - P |
|
× cos j = 0 |
|||||
ïE |
|
|
|
|
|||||||
î |
н |
в |
ц |
ос |
|
|
|
|
|
||
где Eн , Eв – |
реакции наружного |
и внутреннего рельсов соответ- |
|
||||||||
ственно; |
расстояние от центра |
тяжести вагона(локомотива) до |
|
||||||||
уровня поверхности катания; Fц – центробежная сила, действую- |
|
||||||||||
щая на экипаж; Pос осевая нагрузка вагона; j угол наклона экипажа |
|
||||||||||
к горизонтали, определяемый возвышением наружного рельса. |
|
||||||||||
Центробежная сила находится по формуле |
|
|
|||||||||
|
|
|
|
|
P |
V 2 |
|
|
|
||
|
|
|
|
F = |
ос |
× |
max |
. |
|
(10) |
|
|
|
|
|
|
|
||||||
|
|
|
|
ц |
g |
R |
|
|
|
||
|
|
|
|
|
|
|
|
||||
Учитывая |
формулу (10), |
а |
также |
малость |
угла |
||||||
φ( cos j »1, tgj » sin j = |
h |
), из системы уравнений (9) после некото- |
|
||||||||
|
|
||||||||||
|
|
|
S |
|
|
|
|
|
|
|
|
рых преобразований можно получить выражения для величин нагрузок, передаваемых колесами экипажа на наружную и внутреннюю рельсовые нити:
éa ×aнi |
æ Vmax2 |
|
|
hi |
öù |
|
||
Pн = Eн = Pос × ê |
|
+ 0,5 ×ç |
|
× |
|
+1÷ú; |
(11) |
|
S × g |
g × R |
S |
||||||
ë |
|
è |
|
i |
|
|
øû |
|
78
|
|
Наука и молодежь СГУПСа в третьем тысячелетии |
||||||
é |
|
æ |
2 |
|
hi |
öù |
|
|
Pв = Eв = Pос × ê- |
a × aнi |
+ 0,5 ×ç |
Vmax |
× |
+1÷ú, |
(12) |
||
|
|
S |
||||||
ë |
g × S |
|
è g × Ri |
|
øû |
|
||
Для определения горизонтальных сил трения, возникающих в уровне поверхности катания, необходимо умножить вертикальную нагрузку, приходящуюся на одно колесо экипажа на коэффициент трения соответствующей рельсовой нити μ.
Произведя упрощение системы (4) и подставив в нее известные значения, получим систему уравнений равновесия, содержащую две неизвестные величины(направляющее усилие Y и полюсное расстояние x), заданные неявно, которая запишется в виде
ì |
|
|
|
|
|
é |
|
|
|
x |
|
1,85 - x |
ù |
|
Q |
|
|
|
||||
ï(m |
P + m |
P )× |
ê |
|
|
|
- |
|
ú |
+ |
a |
н |
= Y |
|||||||||
|
|
2 |
|
|
|
2 |
|
|
|
|||||||||||||
ï |
|
н н |
|
в в |
ê |
x |
+ 0, 64 |
|
(1,85 - x) |
|
ú |
|
9,81 |
|
||||||||
ï |
|
|
|
|
|
ë |
|
|
|
+ 0,64 û |
|
|
|
|||||||||
ï |
|
|
|
|
|
é |
|
2 |
|
|
|
2 |
|
ù |
|
|
|
|
|
|||
ï |
|
н Pн + mв Pв )× |
x |
+ 0, 64 |
+ |
(1,85 - x) |
+ 0,64 |
|
|
|
|
, (13) |
||||||||||
í(m |
ê |
|
|
|
|
ú - Y × x + |
|
|||||||||||||||
ï |
|
Q |
|
|
ë |
|
|
|
|
|
|
|
|
|
û |
|
|
|
|
|
||
ï |
|
|
(x - 0,925) + M тр = 0 |
|
|
|
|
|
|
|
|
|
|
|||||||||
ï+ |
|
|
|
aн |
|
|
|
|
|
|
|
|
|
|
||||||||
9,81 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ïî
где Q – вес экипажа; µн и µв – коэффициенты трения при скольжении колес по наружному и внутреннему рельсам соответственно.
Система уравнений (13) в отличие от системы(4) не учитывает поперечную силу, возникающую от действия продольной силы в поезде. Данная операция сделана для упрощения расчетов.
Система (13) положена в основу системы вычисления направляющего усилия и полюсного расстояния, реализованную в программе «Microsoft Excel» с помощью надстройки «Поиск решения».
Суть используемого метода следующая. Все исходные данные заносятся в ячейки таблицы. С использованием этих данных составляются формулы, описывающие уравнения равновесия и прочие учитываемые в расчетах условия. Далее вызывается меню надстройки «Поиск решения», в котором указываются целевая функция, изменяемые ячейки, ограничения поиска.
В качестве целевой функции задано одно из уравнений равновесия экипажа в плане, записанное в виде формулы; изменяемые ячейки ячейки, в которых будут размещаться подобранные в результате поиска программой решения уравнений равновесия
79
Сборник научных статей аспирантов и аспирантов-стажеров
(значения неизвестных x и Y); ограничениями поиска являются: положительное значение полюсного расстояния и обращение в нуль формулы, описывающей другое уравнение равновесия тележки в плане.
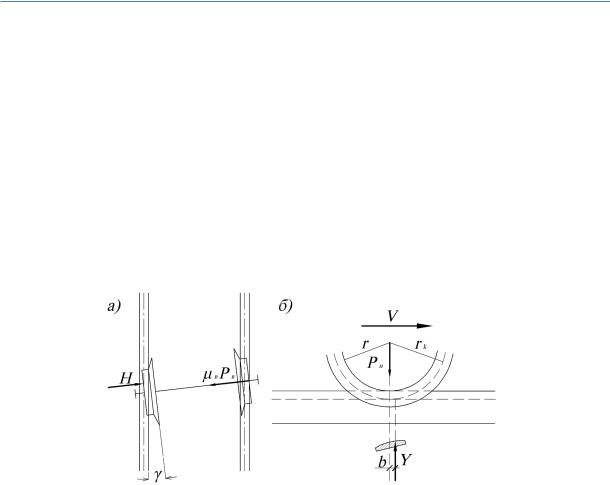
Передние колеса тележек вагонов при движении по кривым, а часто и на прямых участках пути набегают гребнями на боковые грани головок рельсов. Угол набегания γ (рис. 2, а) может доходить до 0,01 рад и даже несколько больше(в крутых кривых). Место контакта гребня колеса с головкой рельса находится впереди от вертикального радиуса колеса(рис. 2, б) на величину b (забег, или предварение касания).
Рис. 2. Схемы взаимодействия колес с рельсами
Для того чтобы предупредить возможность схода колесной пары с рельсов, который может произойти в результате набегания гребня колеса на головку рельса под действием силыF, необходимо и достаточно, чтобы сила Рн, стремящаяся опустить колесо вниз, была бы больше силы, стремящейся препятствовать опусканию (рис. 3). Это условие обеспечивается, если проекция силыРн на плоскость АВ, касательную к образующей к поверхности гребня, больше суммы проекций на ту же плоскость всех остальных сил, включая и силы трения. Данное условие можно записать в виде
F + m¢× Pв |
£ |
tgb - m |
, |
(14) |
|
|
|||
P |
1+ m ×tgb |
|
||
н |
|
|
|
|
где m – коэффициент трения скольжения гребня колеса по закруглению головки рельса; m¢ – коэффициент трения поверхности катания колеса по головке рельса; b – угол между общей касательной АВ в точке соприкосновения с горизонталью; F – боковая сила, кН.
80