

Современные проблемы теории управления
..pdfНеобходимо исследовать следующие полиномы В.Л. Харитонова:
Q1 ( p) = an + aˆn−1 p + aˆn− 2 p2 + an−3 p3 + an− 4 p4 + aˆn−5 p5 + …
Q2 ( p) = an + an−1 p + aˆn− 2 p2 + aˆn−3 p3 + an− 4 p4 + an−5 p5 + …
Q3 ( p) = aˆn + an−1 p + an− 2 p2 + aˆn−3 p3 + aˆn− 4 p4 + an−5 p5 + …
Q4 ( p) = aˆn + aˆn−1 p + an− 2 p2 + an−3 p3 + aˆn− 4 p4 + aˆn−5 p5 + …
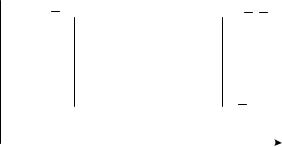
Смысл полиномов В.Л. Харитонова можно пояснить с помощью рис. 3.4.
Если провести в характеристическом полиноме замену p → jω , то характеристический полином можно предста-
вить в виде Q( jω) = u (ω) + jν (ω) . На комплексной плоскости
(см. рис. 3.4) отмечены точки 1 (u ,νˆ), 2 (u ,ν ), 3 (uˆ,ν ) , 4 (uˆ,νˆ) ,
которые являются углами прямоугольника, который очерчивает характеристический вектор при фиксированной частоте ω и изменяющихся ai . Полиномы Харитонова как раз и характери-
зуют эти точки.
Робастная система с детерминированным объектом будет устойчива, если будут выполняться следующие условия:
–при n =1, 2 необходимо и достаточно, если все коэффициенты характеристического полинома положительны.
–при n =3 дополнительно учесть Q1 ( p) > 0 ;
–при n = 4 дополнительно учесть Q1 ( p) > 0 ; Q2 ( p) > 0 ;
– при n = 5 дополнительно учесть Q1 ( p) > 0 ; Q2 ( p) > 0 ;
Q3 ( p) > 0 .
51
jν 
3(uˆ,ν ) 
 2(u ,ν )
2(u ,ν )
4(uˆ,νˆ)
 1(u,νˆ)
1(u,νˆ)
0 |
|
u |
|
|
Рис. 3.4. К определению полиномов В.Л. Харитонова
Теорема В.Л. Харитонова справедлива при условии, что коэффициенты характеристического полинома изменяются на заданных интервалах независимо друг от друга. Однако когда множество возможных значений коэффициентов характеристического полинома определяются заданными множествами возможных значений параметров системы и при этом одни и те же параметры входят в выражения для разных коэффициентов, эти коэффициенты уже не являются независимыми. В этих случаях условия робастной устойчивости по Харитонову являются только достаточными. Из того, что они не выполняются, не следует, что система не может быть робастно устойчива.
Рассмотренные методы и алгоритмы для исследования робастной устойчивости детерминированных объектов с различными типами неопределенностей не пригодны для исследования робастной устойчивости недетерминированных объектов, математическое описание которых неизвестно.
В связи с этим рассмотрим метод поддержания робастной устойчивости недетерминированного объекта, структура и параметры которого не известны, с применением нечеткой обратной связи в замкнутой системе автоматического регулирования.
52

Пример 3. Разработать робастное управление недетерминированным объектом с многоуровневой обратной связью, где для контроля гарантируемого запаса устойчивости и качества переходного процесса принят частотный показатель колебательности М [25], выполняющий роль датчика.
Определение гарантированного запаса устойчивости на базе частотного показателя колебательности М
Теория частотного показателя колебательности М основана на модифицированном критерии Найквиста, где опасная точка с координатами –1, j0 представлена виде «запретной» окружности, куда не имеет право заходить «неоднозначный» годограф разомкнутой САР.
Для замкнутой одноконтурной САР частотный показатель колебательности М определяется по уравнению
M= A((ωp )) ,
A ω0
где А(ωр ) – амплитудно-частотная характеристика замкнутой САР на резонансной частоте ωр ; А(ω0 ) – амплитудно-частотная характеристика замкнутой САР на нулевой частоте ω0 .
Геометрическое место точек на комплексной плоскости W (iω)рс при условии
M = ОАВА = const
есть окружность
(Re − R)2 + J 2 = r2 ,
53

где ОА – отрезок (расстояние) между началом координат и точкой с координатами (– 1, j 0);
ВА– отрезок (расстояние) между точкой с координатами (–1, j 0) и вершиной радиуса-вектора годографа разомкнутой
системы W ( jωр )РС ;
R – расстояние удаления центра окружности от начала
координат, R = |
M 2 |
|
; r – радиус окружности, r = |
M |
|
; |
|
M 2 − 1 |
M 2 − 1 |
||||||
|
|
|
|||||
R = r M; 1 ≤ M ≤ ∞ .
На рис. 3.5 показано построение области с заданным индексом М, куда запрещено заходить (касаться) АЧХ недетерминированного объекта.
Точки пересечения окружности с отрицательной действительной осью комплексной плоскости определяются согласно выражению
U1 |
= |
|
R |
|
− r = |
M |
|
, |
|
|
|||||||
|
|
M + 1 |
||||||
|
|
|
|
|
|
|
||
где при М = 1; U1= 0, 5; U2 = ∞ окружность вырождается в прямую линию и согласно
U2 |
= |
|
R |
|
+ r = |
M |
|
, |
|
|
|||||||
|
|
M − 1 |
||||||
|
|
|
|
|
|
|
||
где при M = ∞ ; r = 0; R = 1 окружность вырождается в точку. Требование, чтобы максимум Ф( jω) не был больше за-
данного значения, сводится к тому, чтобы годограф W ( jω)РС
не заходил внутрь области, ограниченной окружностью с индексом М. Значение индекса М выбирается в пределах 1,1…1,6, чтобы учесть изменения характеристик недетерминированного объекта.
54

Рис. 3.5. К построению окружности с заданным индексом М
Запас по модулю при M = const (см. рис. 3.5)
1
С = 1– (R – r) = M +1 ,
где C – отрезок между точкой (– 1; j 0) и точкой пересечения отрицательной действительной оси с годографом W ( jω)РС чис-
ленно показывает, насколько можно изменить W ( jω)РС РС при
постоянном фазовом соотношении для того, чтобы САР вышла на условную границу устойчивости.
Запас по фазе γ при М = const (см. рис. 3.5).
Для определения координаты точки пересечения единичной окружности с годографом разомкнутой системы запишем уравнения:
55

Re2 + J 2 − |
2M 2 |
|
|
Re+ |
M |
|
= 0 ; |
|
M 2 − |
1 |
M 2 − 1 |
||||||
|
|
|
||||||
Re2 + J 2 = 1.
Из решения данной системыуравнений находим координату
Re = 1− 1 ,
2M 2
где из прямоугольного ReOK определяем
γпред = arccos 1− 2 1 2 .
M
Запас по фазе есть угол γ, лежащий между вещественной отрицательной осью и лучом ON, проведенным из начала координат через точку пересечения годографа W ( jω)РС c единичной окруж-
ностью, центр которой лежит в начале координат. Численно угол γ показывает возможное отставание по фазе при М = const, чтобы САРоказаласьнаусловнойграницеустойчивости.
Гарантируемый запас устойчивости реализуется нечеткой обратной связью с помощью устройства переключений коэффициента обратной связи САР.
Разработка многоуровневого устройства переключений коэффициента обратной связи САР
Из разных вариантов многоуровневого устройства (МУ) [17] выбран вариант реализации на базе одноуровневых триггерных устройств (ТУ) с регулируемой петлей гистерезиса, включенных параллельно в канале обратной связи и смещенных относительно друг друга вправо/влево на равные/разные интервалы скважности выходного сигнала.
ТУ аналогично триггеру Шмидта реализует релейную статическую характеристику с регулируемой петлей гистерезиса ε
56
и отличается от него импульсным входом. В зависимости от величины отклонения частотного показателя колебательности М = Мтек − Ммин ТУ формирует уровни МУ. На рис. 3.5 приведена его статическая характеристика, где характеристики i-х уровней имеют равную высоту R , ширину петли гистерезиса и не смещены относительно друг друга [17]. В зависимости от настройки скважности включения и выключения ТУ1, …, ТУn срабатывают один или несколько ТУ, формируя сигнал обратной связи l R (выход МУ).
Характеристики МУ на базе РЭ и ТУ [17] связаны между собой, поэтому целесообразно при условии постоянства уровня
переключений ( K = const ) определить их соответствие: |
|
||||||
|
|
A |
|
|
n |
|
|
γ = |
|
имп |
|
М − Υl , |
(3.4) |
||
|
|
||||||
|
|
2Aгл |
l =0 |
|
|
||
где |
|
|
|
|
|
|
|
|
Y1 |
|
K, М ≥ |
М1; |
|
||
|
= |
|
|
|
|||
|
|
|
0, М < М1; |
|
|||
Y2 |
|
K, М ≥ 2 М1; |
|
||||
= |
|
М1; |
|
||||
|
|
|
0, М < 2 |
|
|||
………………………. |
|
||||||
Yn |
|
K, М ≥ n М1; |
|
||||
= |
|
М1; |
|
||||
|
|
|
0, М < n |
|
|||
где |
Aимп |
– коэффициент ШИМ-приставки; 2 Aимп |
– двойная ам- |
||
|
|||||
|
2A |
|
|
||
|
|
гл |
|
|
|
плитуда сигнала ГЛИН; Aимп – амплитуда сигнала ШИМ-прис- |
|||||
тавки; |
Y1 ,..Yn – уровни МУ; |
Ki – высота i-го уровня МУ; l – |
|||
число |
возбужденных уровней МУ; n – число |
уровней МУ; |
|||
М1 – шаг дискретизации МУ, |
М1 = γ1 − γ2 ; γ1 |
– верхний уро- |
|||
57

вень петли гистерезиса ТУ; γ2 – нижний уровень петли гистерезиса ТУ, γ2 = γ1 − ε; ε – заданная петля гистерезиса ТУ.
На рис. 3.6 показаны также варианты соответствия статических характеристик МУ на базе ТУ и РЭ. Смещение «столба» статической характеристики ТУ эквивалентно введению «гибкой» связи в нечеткой обратной связи контура управления.
Рис. 3.6. Варианты соответствия статических характеристик МУ на базах РЭ и ТУ ( Aгл = 2)
58
Обратная связь в контуре управления недетерминированного объекта изменяется в интервале от нуля до единицы за счет изменения, например, сопротивления обратной связи операционного усилителя при переключениях МУ. При отсутствии колебаний текущего параметра МУ выдает сигнал, при котором коэффициент передачи операционного усилителя равен единице. При появлении колебаний текущего параметра за счет изменения свойств недетерминированного объекта МУ уменьшает дискретно коэффициент передачи операционного усилителя и ослабляет обратную связь в контуре управления при переключениях ТУ с шагом дискретизации скважности γ , например, равным 0,6.
Разработанный метод робастного управления применительно кнедетерминированным объектамвозможен если:
–недетерминированный объект, обладая свойством самовыравнивания, можно представить объектом третьего порядка
спеременными отрицательными корнями;
–недетерминированный объект, обладая свойством самовыравнивания, можно представить объектом второго порядка
спеременными комплексно-сопряженными корнями с отрицательными действительными составляющими;
–если известна структура недетерминированного объекта, обладающего свойством самовыравнивания, один из коэффициентов может изменяться как по величине, так и по знаку.
Качество управления недетерминированным объектом определяется работой адаптивного нечеткого регулятора.
Разработка адаптивного нечеткого регулятора
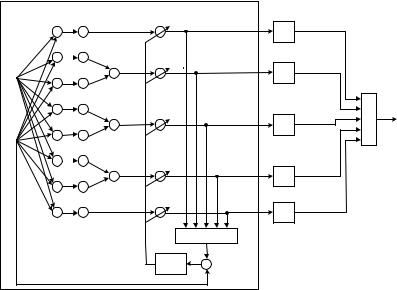
Теория нечеткого управления широко рассмотрена в [13]. Рассматривается адаптивный нечеткий регулятор, содержащий адаптивный фаззификатор и блок активационных функций [26], показанный на рис. 3.7. Выбор числа функций принадлежностей (ФП) терм-множества фаззификатора традиционный (для инерционных (тепловых) объектов число ФП не более трех, для малоинерционных объектов (сверхпереходные процессы синхрон-
59
|
+ |
w |
f1 |
|
y1 |
φ1 |
|
F(r) |
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
w |
+ |
w2 |
f2 |
1 |
|
|
|
|
|
|
|
|
|
|
φ2 |
|
|
|
|
||||
с1 |
|
|
|
y2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
1 |
|
w3 |
f3 |
+ |
|
|
F(r) |
|
|
||
+ |
|
|
|
|
|
||||||
|
|
−1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
f4 |
|
|
|
|
|
|
||
wс8 |
+ |
w |
1 |
|
φ3 |
|
|
|
y |
||
|
4 |
|
|
y3 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
+ |
w5 |
f5 |
+ |
|
|
F(r) |
|
|
||
х |
|
|
−1 |
|
|
|
|
|
|
||
|
f |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
w6 |
|
6 |
1 |
|
|
|
|
|
|
|
|
|
y4 |
φ4 |
|
|
|
|
|||
|
|
f7 |
|
|
|
|
|||||
|
|
w7 |
+ |
+ |
|
F(r) |
|
|
|||
|
+ |
|
|
|
|
||||||
|
|
|
−1 |
|
|
|
|
|
|||
|
|
f8 |
|
φ5 |
|
|
|
|
|||
|
+ |
w |
|
y5 |
|
F(r) |
|
|
|||
|
8 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
r1 |
|
|
|
|
АНФ |
|
|
БА1 |
ε1 + |
|
|
|
||
|
|
|
|
|
− |
|
|
||||
Рис. 3.7. Адаптивный нечеткий регулятор: БА1 – блок алгоритмов; φi – синапсы; x – отклонение текущего параметра от заданного значения; y – управляющее воздействие регулируемого объекта
ного генератора) – от 7 до 11). В качестве ФП можно задавать как линейные, так и нелинейные функции. В адаптивном нейронном фаззификаторе выбрано пять нелинейных ФП (терм), представленных сигмоидными функциями f1 ,... f8 , аналитиче-
ские выражения которых показаны ниже [4]:
|
|
|
|
y1 = |
1 |
|
|
; |
|
|
(3.5) |
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1+ exp(−w1 (x + wc1 )) |
|||||||||||
y2 |
= |
1 |
|
|
− |
1 |
; |
(3.6) |
|||||
|
|
|
|
|
|
||||||||
1+ exp(−w2 (x + wc2 )) |
1+ exp(−w3 (x − wс3 )) |
||||||||||||
y3 |
= |
1 |
|
|
− |
1 |
|
; |
(3.7) |
||||
|
|
|
|
||||||||||
1+ exp(−w4 (x + wc4 )) |
1+ exp(−w5 (x − wс5 )) |
||||||||||||
60