

Современные проблемы теории управления
..pdfОРО (обратное распространение ошибки) и МНК (метод наименьших квадратов).
Алгоритм ОРО настраивает параметры предпосылок, т.е. функций принадлежности фаззификатора. МНК оценивает коэффициенты заключения правил, так как они линейно связаны с выходом сети. Каждая итерация процедуры настройки выполняется в два этапа.
На первом этапе на входы подается обучающая выборка, и по невязке между желаемым и действительным поведением сети МНК находятся оптимальные параметры узлов четвертого слоя. На втором этапе остаточная невязка передается с выхода сети на входы и методом ОРО модифицируются параметры узлов первого слоя. При этом найденные на предыдущем этапе коэффициента заключения правил не изменяются. Итерационная процедура настройки продолжается, пока невязка превышает заранее установленное значение.
8.2.1.Модифицированная нечеткая нейронная сеть ANFIS
Сеть ANFIS и ее разновидности обладают одним существенным недостатком с точки зрения ее использования в системах реального времени – длительное время настройки. Настройка сети осуществляется градиентными итерационными алгоритмами (ОРО, Уидроу–Хоффа) и занимает продолжительное время. В системах реального времени время на выработку управляющего воздействия жестко ограничено, что делает невозможным применение традиционных сетей ANFIS. Данная проблема может быть решена применением адаптивных линейных нейронов с алгоритмом последовательного обучения в первом слое [26].
Общий вид модифицированной продукционной нейронной сети ANFIS с применением адаптивных нейронов представ-
лен на рис. 8.6 [23].
201
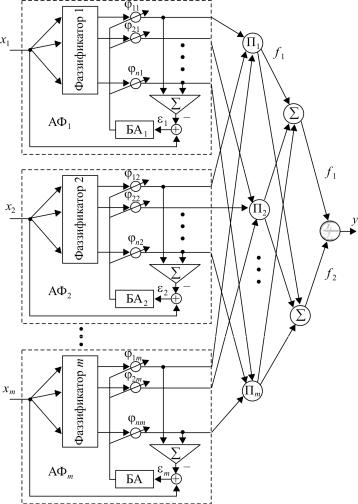
Рис. 8.6. Модифицированная нечеткая нейронная сеть ANFIS с применением адаптивных нейронов
202
Для применения алгоритма последовательного обучения необходимо:
♦В первом слое модифицированной сети заменить терммножествонамножество адаптивных фаззификаторов (нейронов);
♦Во втором слое возможна любая нечеткая импликация;
♦В третьем слое проводится нормализация сигналов второго слоя;
♦В четвертом слое возможно применение заключений
правил.
Рассмотрим модифицированную сеть ANFIS Ванга–Мен- деля. Она базируется на следующих положениях:
♦Входные переменные являются четкими;
♦ФП определены множеством адаптивных линейных фаззификаторов;
♦Нечеткая импликация Ларсена – нечеткое произведение;
♦T-норма – нечеткое произведение;
♦Композиция не производится;
♦Метод дефаззификации – средний центр. Модифицированная сеть ANFIS с применением алгоритма
Ванга–Менделя отличается простотой и является эффективной с точки зрения быстродействия, что позволяет использовать ее в системах реального времени [23].
Аналогичным образом возможна модификация нечеткой нейронной сети ANFIS с применением алгоритма Такаги– Сугено–Канга [23].
8.3. ПРИМЕРЫ ПРИМЕНЕНИЯ НЕЙРОННОЙ ТЕХНОЛОГИИ
Пример 8. Разработать систему связного управления турбовинтового авиационного двигателя
Для эффективного использования турбовинтового двигателя (ТВД) летательного аппарата (ЛА) применяют системы ав-
203
томатического регулирования. Динамические свойства ТВД определяются газодинамическими и тепловыми процессами, протекающими в нем, а также механическими свойствами его подвижных частей [52, 53]. Кроме того, динамические свойства двигателей существенно меняются при изменении внешних условий – скорости полета, давления и температуры воздуха. В качестве перспективного направления при проектировании систем управления авиационными двигателями рассматривается система связного управления с применением нейронной технологии. Работа связного управления контура частоты вращения силовой турбины, связанной с винтом, и контура мощности определяется мощностью винта
Nв = f (v,ψ,nст ,TH , PН ) ,
где v – скорость полета ЛА; Nв − мощность винта; ψ – угол поворота лопастей винта; nст – частота вращения силовой турбины; TН и PН – соответственно, температура по Кельвину и давление
воздуха на высоте полета Н.
На рис. 8.7 приведена структурная схема системы связного управления ТВД ЛА.
nзад |
|
− |
n |
+ |
|
х |
|
Рψ |
|
ψ |
n |
ст |
+ + |
ст |
+ |
|
|
|
|||||
|
|
|
1 |
|
|
|
|
||||
|
|
|
+ |
|
|
|
|
ст |
|||
|
|
+ |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dn |
|
|
Nв |
|
|
|
|
|
|
|
|
ст |
|
|
|
− |
|
|
|
|
|
|
|
dt |
|
|
+ |
|
|
|
|
|
Ne |
|
+ |
|
|
|
+ |
|
|
зад |
|
|
|
|
|
Ne |
|||||
|
х2 |
G |
|
|
|
||||||
Ne |
|
+ |
|
|
+ |
|
|
|
|||
+ |
|
+ |
|
PG |
|
|
|
|
|||
|
− |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.7. Структурная схема системы связанного управления |
|||||||||
|
|
|
|
|
|
ТВД ЛА в статике |
|
|
|
|
|
204
Структурная схема (см. рис. 8.7) содержит контур частоты вращения свободной турбины, включающей регулятор Рψ для ус-
тановки угла поворота лопастей винта ψ, и контур мощности срегулятором РG для управления регулирующим органом (дозатором) подачи топлива в двигатель. Связь контуров в статике определяется переменными nст и Nе . В структуре предусмотрено введение сигнала, пропорционального ускорению свободной тур-
бины |
dnст |
(гибкая обратная связь). Связь угла поворота лопастей |
|
|
|||
|
dt |
|
|
винта |
ψ с частотой вращения свободной турбины |
nст , а также |
|
срасходом топлива G и с мощностью двигателя Nе |
является не- |
||
определенной и на рис. 8.12 представлена пунктиром со стрелкой. Авиационный двигатель ЛА имеет несколько выходов, из которых два: частота вращения свободной турбины и мощность двигателя Ne используются в структуре (см. рис. 8.12). Взаимодействие сило-
вой турбины и винта выражается уравнением динамики, согласно которому формируется производная частоты вращения свободной
турбины Jnст dnст = Ne − Nв , где J – приведенный к валу силовой dt
турбинымоментинерции; Nе − мощностьсиловойтурбины. Возможны разные режимы работы двигателя.
Так, у ЛА, когда он находится на земле, контур частоты вращения свободной турбины nст селектором отключен и угол поворота лопастей винта ψ задается вручную.
В режиме взлета ЛА селектор отключает вход регулятора РG в контуре мощности. Программное изменение nТК задает изменение топлива в двигатель согласно выражению
G = f1 (nТК ) .
Для исключения скачкообразного изменения nст предусмотрен задатчик интенсивности. По окончании режима взлета
205
наступает крейсерский режим полета (статика), и селектор отключает контур nТК , восстанавливая связь в контуре мощности
Ne . Установочные значения контуров nст и Ne связаны между собой зависимостью Neзад = f (nстзад ), которая может быть линейной и нелинейной. Возникшее отклонение в статике между значением nстзад и текущим значением nст и, как следствие, корректируемым значением Nезад и текущим значением мощности двигателя Nе автоматически корректирует подачу топлива в двигатель, парируя снижение Ne и, как следствие, nст , В статике выполняется обменная информация между контурами nст и Nв , что обеспечивает соответствие между заданным значением nстзад и заданной мощностью двигателя Nезад .
В структурной схеме (рис. 8.7) G и ψ есть управляющие воздействия, вырабатываемые регуляторами Pψ и PG , а Ne и nст – регулируемые параметры, где на вход регулятора Pψ подается
сигнал x1 |
= |
nст + |
Ne + dnст , а на вход регулятор топлива PG – |
|
|
|
dt |
сигнал x2 |
= |
nст + |
Ne . |
Как известно, из-за нелинейности характеристик объекта управления применение линейных законов управления не дает заданной точности управления. В связи с этим рассмотрим применение нелинейных аппроксиматоров (гибридных регуляторов) в контурах системы связного управления авиационного двигателя ЛА. Регулятор включает фаззификатор (элемент нечеткого регулятора) и блок активационных функций (элемент нейронного регулятора).
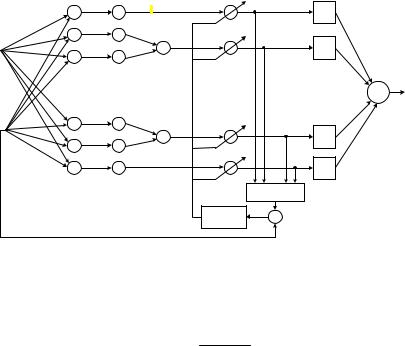
Регулятор угла поворота лопастей вентилятора показан на рис. 3.6, а на рис. 8.8 приведен регулятор топлива двигателя. Оба регулятора включают в себя адаптивные фаззификаторы и блоки активационных функций, каждая из которых представ-
206
|
w1 |
f1 |
y1 |
φ1 |
|
F |
|
|
|
|
|
|
|||
wс1 |
w2 |
f2 |
1 |
|
|
|
|
|
|
|
|
|
|||
1 |
w3 |
|
y2 |
φ2 |
|
F |
|
f3 |
−1 |
|
|
||||
|
|
|
|
|
|
|
|
wс6 |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х2 |
w4 |
f4 |
1 |
|
|
|
|
|
|
|
|
|
|||
|
w5 |
|
y3 |
φ3 |
|
F |
|
|
f5 |
|
|
|
|||
|
−1 |
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
w6 |
f6 |
y4 |
φ4 |
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
r |
+ |
|
|
|
|
|
БА |
|
− |
|
|
|
|
|
|
|
|
|
|
Рис. 8.8. Регулятор топлива двигателя ЛА |
|
|||||
лена в виде смещенной симметричной функции (гиперболический тангенс):
F (g ) = eg − e− g , eg + e− g
где g – аргумент (вход) активационной функции. В адаптивных фаззификаторах использованы сигмоидные функции принадлежности (ФП) f1 ,... f8 (см. рис. 3.6) и сигмоидные ФП f1 ,... f6
(см. рис. 8.13) с применением нейронной технологии. Выбор числа ФП (терм) лежит в диапазоне от 2 до 11. Если исследуются электромагнитные переходные процессы, то желательно выбирать от 6 и более. В данном случае в фазификаторе регулятора угла поворота вентилятора принято пять ФП: отрицательное среднее (ОС), отрицательное малое (ОМ), норма (Н), положительное малое (ПМ), положительное среднее, где терм Н обеспечивает память положения регулирующего органа (управляющего воздействия ψ) при нулевом отклонении текущего пара-
метра (частота вращения свободной турбины) от заданного
207
значения nстзад . В фаззификаторе регулятора топлива приняты
четыре ФП: ОС, ОМ, ПМ, ПС, так как дозатор управляется ПИрегулятором. Интеграл в законе управления обеспечивает память текущего расхода G, что исключает терм Н в заданном терм-множестве. ФП в фаззификаторе регулятора выражены с помощью сигмоидных функций, аналитические выражения которых представлены в (3.5)–(3.9).
Аналогично имеют аналитические выражения сигмоидных ФП фаззификатора регулятора топлива двигателя согласно
(3.6)–(3.9):
|
|
|
y1 |
= ОС = |
1 |
|
|
; |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1+ exp(−w1 (x + wc1 )) |
||||||||||||
y2 |
= ОМ = |
|
|
1 |
|
|
|
− |
1 |
; |
||||
|
|
|
|
|
|
|
|
|||||||
1+ exp(−w2 |
|
(x + wc2 )) |
1+ exp(−w3 (x − wс3 )) |
|||||||||||
y3 |
= ПМ = |
|
|
1 |
|
|
− |
1 |
|
; |
||||
|
|
|
|
|
||||||||||
1+ exp(−w4 |
|
(x + wc 4 )) |
1+ exp(−w5 (x − wс5 )) |
|||||||||||
|
|
|
y4 |
= ПС = |
1 |
|
|
|
, |
|||||
|
|
|
|
|
||||||||||
|
|
|
1+ exp(−w6 (x − wc6 )) |
|||||||||||
где wci – параметры смещения сигмоидных ФП; wi – вес суммарного сигнала на входе сигмоидных ФП; yi – активизированные степени принадлежности фаззификатора синглетоном, синхронно связанным с входом x1 (см. рис. 8.13), и активизированных степеней принадлежности фаззификатора синглетоном, синхронно связанным с входом x2 .
Входные сигналы x1 и x2 фаззификаторов регуляторов
угла поворота лопастей вентилятора и топлива двигателя несут информацию, связанную как с управлением, так и различными возмущениями. Учитывая, что размещение терм нейронных фаззификаторов регуляторов угла поворота и расхода топлива
208

производилось только с учетом предельных значений переменных x1 и x2 , то необходимо их адаптировать с помощью нейро-
нов с последовательным обучением согласно рекуррентной формуле (3.10) [12].
Метод последовательного обучения отличается быстродействием и возможностью использования как линейных, так и нелинейных терм.
Произведения активизированных степеней принадлежности фаззификатора и синапсов адаптивного нейрона, являясь аргументами, подаются на входы соответствующих функций активации Fi, число которых равно выходам нейронных фаззификаторов. Функции активации Fi типа гиперболический тангенс усиливают слабый сигнал на входе и ослабляют сильный сигнал. Функции активации формируют составляющие сигналов управления в контурах регулирования угла поворота лопастей вентилятора и мощности двигателя ЛА. Введение адаптивных нейронов в регуляторы корректирует термы нейронных фаззификаторов к текущим значениям x1 и x2 как в статике, так и динамике. Вы-
бор настроек активационных функций делает их актуальными и способствует к широкому применению на практике. Астатизм регуляторов Рφ и РG обеспечивается наличием интегратора
в законе управления дозатора авиационного двигателя.
Для проведения математического моделирования системы связного управления авиационным двигателем принята передаточная функция с переменными параметрами вида:
( ) K дв (T p + 1)
W p = ( G + 1)G( + 1) ,
TТК p Tст p
где KGдв – коэффициент усиления двигателя по контуру частоты вращения; ТG – форсирующая постоянная времени; ТТК − постоянная времени турбокомпрессора высокого давления; Тст – постоянная времени силовой турбины; p – оператор.
209

На рис. 8.9 приведена осциллограмма работы системы связного регулирования при задании nстзад (угол поворота ручки в
диапазоне 52,5…100 угл. град.).
На осциллограмме (см. рис. 8.9, б) показано практически синхронное изменение мощности вентилятора и мощности двигателя.
Рис. 8.9. Осциллограмма работы системы связанного регулирования:
а– установочное nстзад ( nctyi ) и текущее изменение nст ( ncti ) частоты вращения вентилятора, %; б – установочное Nезад ( neyi ), текущее
изменение мощности двигателя Nе ( nei ) и текущая мощность вентилятора Nв ( nbi ), %, время ti , с
210