

Молодежная весна 2022
.pdfАппроксимация кривых растяжения и сжатия
В. Т. Григорян1, Д. И. Дудин2
1, 2 студент гр. СУС-18, факультет строительства и экологии ЗабГУ, г. Чита
Цель работы – сравнение аппроксимирующих моделей для диаграмм напряжения-деформации. Модели, представленные в виде математической зависимости, а не таблично заданной функции могут быть использованы в более сложных математических моделях, например описывающих прочность конструкций. Подбирая параметры аппроксимирующих функций в некоторых случаях можно определить связанные с ними механические характеристики, например модуль упругости или предел пропорциональности.
Будут рассмотрены экспериментальные данные для стали 1045 [1], аналог отечественной стали марки 45 и бетон [2], соответствующий марке М200.
Число заданных точек превышает число определяемых коэффициентов аппроксимации, поэтому используем метод наименьших квадратов (МНК) (рис. 1).
Рис. 1. Метод наименьших квадратов
В МНК требуется подобрать параметры уравнения:
,
где yi, xi – экспериментальные данные; ŷ – значения аппроксимирующая функции с неизвестными параметрами (коэффициента-
ми) а1, а2, а3 … ŷi = f (xi, a1, a2, a3, …).
191

Параметры аппроксимации подбирались с помощью библиотеки scipy для языка программирования Python (рис. 2–4).
Рис. 2. Диаграммы состояния сжатого бетона:
а – трёхлинейная аппроксимация, б – двухлинейная
Рис. 3. Аппроксимация функции растяжения стали в виде двухлинейной диаграммы и графика уравнения Хокетта-Шерби
Рис. 4. Аппроксимация для бетона в виде двухлинейных диаграмм
192
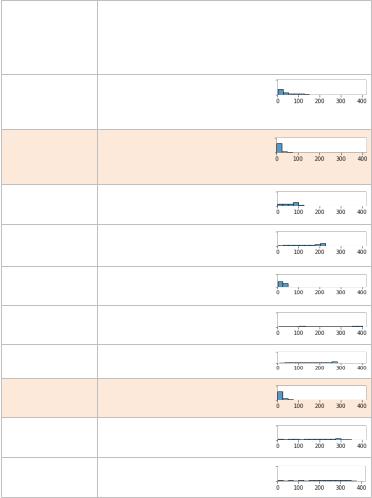
Лучшими аппроксимирующими функциями для стали 1045 оказались: двухлинейная кусочная функция с наклонной добавочной линией, а также функция, заданная уравнением ХокеттаШерби. Относительный модуль средней ошибки 9,15 и 7,67 % соответственно (табл. 1).
Таблица 1
Аппроксимации для стали
Название
Двухлинейная
диаграмма с горизонтальным
участком
Двухлинейная
диаграмма
снаклонным
участком
Степенной закон Бюльфингера
Парабалическая
зависимость
Гернстера
Диаграмма
Соколовского
Диаграмма
Тимошенко
Кубическая
Хокетт-Шерби
PCI-зависимость
Уравнение Gosh
|
модуль.Ср ошибки, МПа |
модуль.Ср ошибки, % |
Гистограмма |
|
|
|
|
Формула |
|
|
распределения |
|
|
|
модуля ошибки |
|
40.44 |
13.33 |
|
|
19.50 |
9.15 |
|
|
62.80 |
33.70 |
|
|
143.45 |
45.00 |
|
|
390.29 |
100.5 |
|
|
224.55 |
67.90 |
|
|
173.62 |
54.30 |
|
|
19.41 |
7.67 |
|
|
181.80 |
101.6 |
|
|
185.28 |
106.4 |
|
|
|
|
|
193
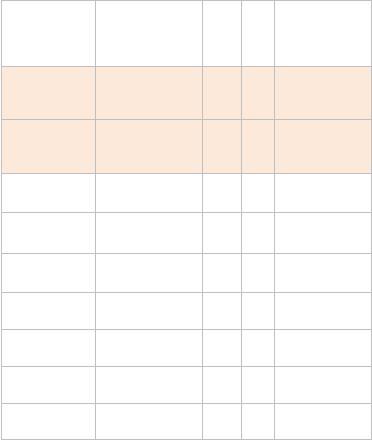
Для бетона лучшими функциями оказались двухлинейная аппроксимация с прямой и аналогичный вариант, но уже с двумя наклонными. Относительный модуль средней ошибки 3,9 % и 3,32 % соответственно (табл. 2).
Таблица 2
Аппроксимации для бетона
Название Формула
Двухлинейная
диаграмма с горизонтальным
участком
Двухлинейная
диаграмма
снаклонным
участком
Степенной закон Бюльфингера
Парабалическая
зависимость
Гернстера
Диаграмма
Соколовского
Диаграмма
Тимошенко
Кубическая
Хокетт-Шерби
PCI зависимость
Ср модуль. ,ошибкиМПа
0.41
0.25
2.02
0.61
1.39
0.96
0.73
0.40
5.42
модуль.Ср ошибки, % |
Гистограмма рас- |
|
пределения модуля |
|
ошибки |
3.90 
3.32 
26.02 
4.93 
13.14 
7.22 
5.19 
6.02 
104.61 
Список литературы
1. ProfessorKazarinoff. Текст: электронный / GitHub: [сайт]. URL: https://github.com/ProfessorKazarinoff/staticsite/tree/master/content/ code/matplotlib_plots/stress_strain_curves (stell 1045) (дата обращения: 13.04.2022).
194
2.Plotting a Stress Strain Curve with Python and Matplotlib. Текст : электронный / Python for Undergraduate Engineers: [сайт]. URL: https:// pythonforundergradengineers.com/stress-strain-curve-with-python-and- matpotlib.html (дата обращения: 13.04.2022).
3.Saouma V. NUMERICALSIMULATION OF QUASI-STATICAND DYNAMIC EXPERIMENTS OF STANDARD AND DAM CONCRETE / V. Saouma,J. Bolander,E. Landis.//9thInternationalConferenceonFracture Mechanics of Concrete and Concrete Structures. 2020. № 9. С. 5.
Научный руководитель С. В. Ветров, старший преподаватель кафедры ИВТиПМ, Забайкальский государственныйуниверситет.
Теоретические предпосылки использования роботов-манипуляторов в строительстве
К. А. Спиридонова1, А. Б. Ёлгин2, В. Н. Шумов3
1, 2, 3 студент гр. СТ-20, факультет строительства и экологии ЗабГУ, г. Чита
Роботы-манипуляторы – автоматические устройства, предназначенные, для перемещения объекта в одномерном, двухмерном или трехмерном пространстве по заранее заданной программе. Такие устройства проектируются и изготавливаются для замены однообразного, кропотливого и опасного труда человека.
Впервые слово «Робот – барщина, подневольная работа» появилось благодаря чешскому художнику и применено его братом, писателем Карелом Чапеком в пьесе «Россумские универсальные роботы» в 1920 г.
Подвижные части роботов обеспечивают плоское или пространственное движение изделия благодаря наличию сочленений допускающих поступательное или вращательное движение сопрягаемых звеньев.
Основной критерием развития робототехники, является потребность промышленности в повышении производительности и снижении затрат на выпускаемую продукцию. Использование роботов-манипуляторов позволяет существенно повысить точность позиционирования изделия при его перемещении или обработке, что дает возможность выпускать конечную продукцию со значительно меньшим количеством брака, а, следовательно, и меньшим объемом исходного сырья.
195
Применение робототехники дает возможность предприятию обеспечить быстрое переналаживание производственных процессов, улучшить условия работы персонала в цехах.
По типу выполняемых функций роботы-манипуляторы бывают:
– сборочные роботы-манипуляторы; – роботы-манипуляторы пайки и сварки; – роботы-манипуляторы, обрабатывающие материалы; – роботы-манипуляторы очистки, покраски, дозирования; – роботы-манипуляторы для резки; – строительные роботы-манипуляторы; – прочие.
После того, как человек решил усовершенствовать процесс работы, касающихся различных областей, моментально появились роботы манипуляторы в строительстве, которые сегодня пользуются особой популярностью и спросом.
И тому есть простое объяснение, ведь с каждым днем они становятся более производительными, существенно экономя при этом много времени, они помогают достичь улучшения результата, и, конечно же, с легкостью создают необходимые удобства.
Роботы-манипуляторы, применяемые в строительстве (рис. 1, 2) повышают скорость возведения объектов, обеспечивают точность и качество выполнения технологических операций.
Ксказанномуможнодобавитьивозможностьработыроботовбез перерыва на обед и «перекуров». В этой отрасли роботы-манипу- ляторы помогают строить здания, ориентируясь на информационную модель. Это помогает избежать ошибок установки, ускорить строительство сооружений, уменьшить количество отходов.
Ктому же с помощью манипуляторов можно строить сложные геометрические формы.
Робот-манипуляторсостоитизпередвижнойистационарной базы, это, как правило, руки, которые способны выполнять большое количество различных звеньев. Более того в этих устройствах установлены и специальные датчики, которые не только показывают состояние данного аппарата, но и различные другие приспособления.
196

Рис. 1. Промышленный робот для разрушения прочных пород
Рис. 2. Промышленный робот для сварки
Также есть и съемные инструменты, которые существенно могут облегчить работу. Роботы сегодня используются практически при любых строительных работах, где они показывают максимально высокие результаты. Более того, сегодня их часто применяют при строительстве деревянных домов, что, безусловно, является положительным моментом.
197
Метод расчета кинематики и динамики робота-манипуля- тора основан на применении уравнений Лагранжа 2-го рода и позволяет описывать динамику процесса движения подвижных звеньев манипуляторов с шарнирами вращения и поступательного движения. Форма записи уравнений позволяет применять символьные вычисления для вывода уравнений в конечной форме. Это увеличивает скорость проведения вычислительных работ до 4–5 раз для 2 и 3-звенных манипуляторов.
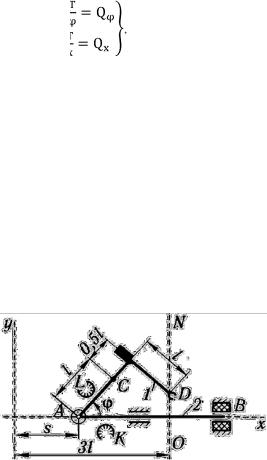
Ниже представлены уравнения Лагранжа 2-го рода с двумя степенями свободы.
где Т – кинетическая энергия системы; Qφ и Qx – обобщенные силы, соответствующие обобщенным координатам х и j.
Составим дифференциальные уравнения движения звеньев робота-манипулятора, используя уравнения Лагранжа второго рода.
Задача: Манипулятор состоящий из звеньев 1, 2 и захвата D, приводитсяв движениеприводами А иВ. ЗахватD перемещается вдоль прямой ON. Со стороны привода А к звену 1 прикладывается управляющий момент МA. Привод B воздействует на звено 2 управляющим усилием РB.Перемещение звена 1 манипулятора ограничено препятствиями К и L, поэтому изменение угла поворота j = j(t) этого звена возможно лишь в интервале [j(0), j(t)], где t – время движения звена. Технические условия работы манипулятора требуют, чтобы указанное звено сошло со связи К при t = 0 и «мягко» коснулось препятствия Lпри t = t.
198
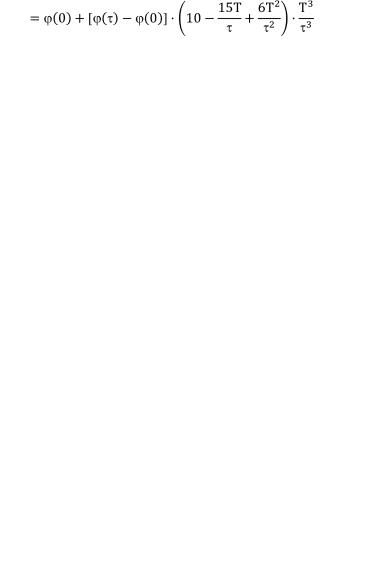
Программное движение звена 1, удовлетворяющие требованиям «мягкого» касания, приняты в виде:
.
Решение:
Qx = P– это управляющееусилие,
Qφ = M – это управляющий момент. Находим координатыXc = S + L ·cos(φ),центра тяжестиYc = L · sin(φ).
Берем первую производную от этих координат
Определяем кинетическую энергию первого и второго звена
Определяем ω1,.υ2, υc
Определение значения кинетической энергии
199

Находим все значения уравнения Лагранжа 2-го рода
Подставляем найденные значения в уравнение Лагранжа
Определяем значение S, находим его первую и вторую производную
Подставляем найденные значения в уравнение Лагранжа, полученное нами
200