

1.3.3. Управляющий элемент перекрестной связи
Основная идея управляющего элемента перекрестной связи или контроллера перекрёстной связи в международных источниках (КПС) заключается в том, что целью контроллера является устранение ошибки контура, а не уменьшение ошибок отдельных осей [6].

Рисунок 9
Поэтому
контроллер перекрестной связи требует
построения модели ошибки контура в
реальном времени и ее использования в
законе управления, который уменьшает
ошибку контура. Структурная схема
базового КПС представлена на рис. 9.
Ошибки осевого положения
 и
и
 используются для определения ошибки
контура ε путем умножения на переменные
коэффициенты усиления
используются для определения ошибки
контура ε путем умножения на переменные
коэффициенты усиления
 и
и
 соответственно. Необходимый правильный
закон управления базируется на
ПИД-регуляторах:
соответственно. Необходимый правильный
закон управления базируется на
ПИД-регуляторах:
 и распределяется на две осевые составляющие
путем умножения на
и
.
Эти осевые компоненты затем входят в
отдельные осевые цепи управления с
соответствующим законом управления,
гарантирующим, что исправление ошибок
контура выполняется в правильном
направлении. Однако, из-за двойной
структуры контроллера, его стабильность
бывает низкой, особенно когда задействована
многоосевая обработка [22,32,33,34].
и распределяется на две осевые составляющие
путем умножения на
и
.
Эти осевые компоненты затем входят в
отдельные осевые цепи управления с
соответствующим законом управления,
гарантирующим, что исправление ошибок
контура выполняется в правильном
направлении. Однако, из-за двойной
структуры контроллера, его стабильность
бывает низкой, особенно когда задействована
многоосевая обработка [22,32,33,34].
1.4. Выводы по главе
1. Усовершенствование динамических характеристик системы автоматического привода ведется в области подбора коэффициентов усиления или в области комбинированного управления, то есть задания предискажения сигнала управления, что негативно сказывается на стабильность работы СУЭП.
2. Основные исследования, проводимые в области увеличения точности контурной обработки ведутся в области улучшения работы каждого привода в отдельности, что негативно сказывается на контурной точности.
3. Вычислительные нагрузки при определении контурной ошибки методами, дающими наиболее точные оценки контурной ошибки, слишком высоки, чтобы система работала в реальном масштабе времени. При этом при использовании вычислений менее сложных, таких как применении касательной линии к заданной траектории не позволяет с достаточной степенью точности оценить величину контурной ошибки.
4. Известные математические модели СУЭП и устанавливаемые регуляторы в СУЭП ведут работу уже с имеющейся динамической ошибкой в контуре положения.
Глава 2. Моделирование работы суэп
2.1. Описание экспериментального оборудования
Для проведения экспериментов, и разработки нового управляющего элемента, необходимо определить динамические характеристики и построить структурные модели приводов подачи экспериментального станка. Рассматриваемый станок — это 3-х осевой фрезерный станок в лаборатории кафедры МТ-1 «Металлорежущие станки» МГТУ им. Н.Э. Баумана (Рис.10). ОПИСАТЬ МОДЕЛЬ
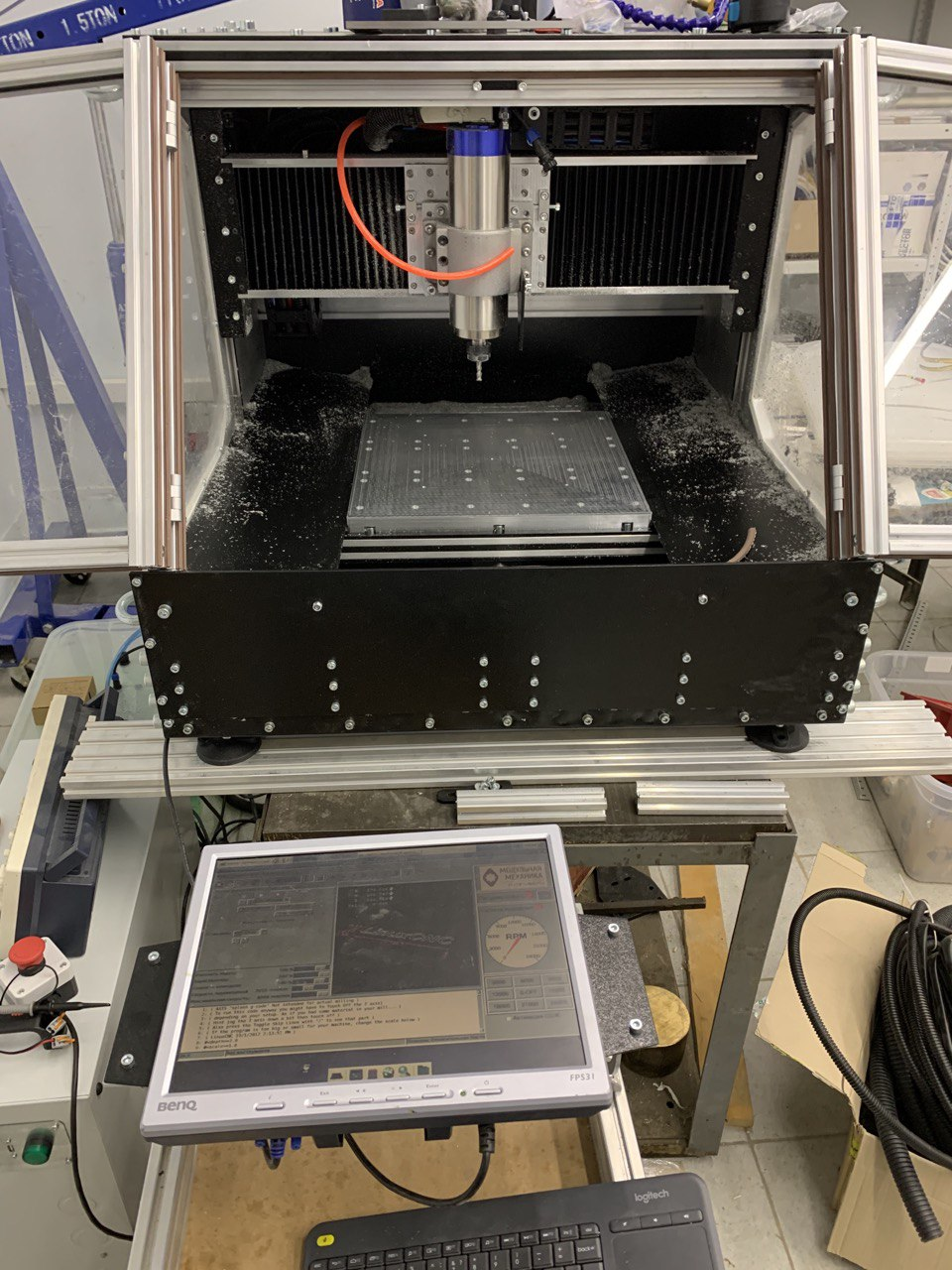
Рисунок 10

Рисунок 11
На рис. 11 представлена система ЧПУ, содержащая СУЭП по трем координатам.
Первым шагом к достижению максимальной производительности любой системы является разработка точной модели системы. Моделирование системы и идентификация параметров позволяют оценить пропускную способность или стабильность системы и установить реалистичные цели для проектируемой (разрабатываемой) системы. Использование модели для оценки новых конструкций контроллеров при моделировании может значительно сэкономить время для достижения желаемой производительности.
Поскольку исследование в данной работе сосредоточено на уменьшении контурной ошибки в плоскости обработки x-y, описано моделирование СУЭП только для осей x и y. Каждая ось состоит из четырех основных компонентов: управляющего элемента (контроллера), усилителя, двигателя и подвижного стола (горизонтального перемещения шпинделя для оси у).
Структурная схема работы приводов представлена на рис. 12. Стол перемещается в направлении оси х, шпиндель перемещается в направлении оси у.
Блок схема, для моделирования динамических характеристик каждого привода, представлена на рис. 13. Для приводов по осям х и у она идентична (различая в массогабаритных характеристиках, которые оказываются непосредственное влияние на динамике системы).

Рисунок 12

Рисунок 13