

3.3.3. Формулировка управления
Динамика станка в этом разделе моделируется следующим уравнением
|
(101) |

где
 обозначает силу трения, а
обозначает силу трения, а
 обозначает аддитивное ограниченное
возмущение, представляющее силы резания,
и
обозначает аддитивное ограниченное
возмущение, представляющее силы резания,
и
|
|

Трение
и резание моделируются таким образом,
что
 ,
,
 и
и
 существуют и ограничены при
существуют и ограничены при
 (более подробную информацию о модели
трения см. в [45]).
(более подробную информацию о модели
трения см. в [45]).
Чтобы
облегчить разработку управления, вторая
отфильтрованная ошибка отслеживания,
обозначаемая
 ,
определяется следующим образом
,
определяется следующим образом
|
(102) |

где
 − положительный постоянный коэффициент
усиления управления, а
определяется в уравнении (85). Отфильтрованная
ошибка отслеживания
− положительный постоянный коэффициент
усиления управления, а
определяется в уравнении (85). Отфильтрованная
ошибка отслеживания
 не поддается измерению, поскольку
выражение в уравнении (102) зависит от
не поддается измерению, поскольку
выражение в уравнении (102) зависит от
 . После предварительного умножения
уравнения (102) на
можно получить следующее выражение
. После предварительного умножения
уравнения (102) на
можно получить следующее выражение
|
(103) |

где использовались уравнения (101) и (85). На основе выражения в уравнении (38) входной крутящий момент управления рассчитывается следующим образом
|
(104) |

где
 обозначает впоследствии разработанное
управляющее условие. Подставляя уравнение
(104) в уравнение (103), можно получить
следующее выражение
обозначает впоследствии разработанное
управляющее условие. Подставляя уравнение
(104) в уравнение (103), можно получить
следующее выражение
|
(105) |

Чтобы
облегчить проектирование
 ,
уравнение (40) дифференцируется следующим
образом
,
уравнение (40) дифференцируется следующим
образом
|
(106) |

Основываясь на уравнении (106) и последующем анализе стабильности, рассчитывается следующим образом
|
(107) |

где производная по времени от уравнения (107) задается как
|
(108) |

После подстановки уравнения (108) в уравнение (106) может быть получена следующая система ошибок с замкнутым контуром
|
(109) |

где
 обозначает следующий неизмеримый
вспомогательный член
обозначает следующий неизмеримый
вспомогательный член
|
(110) |

Для облегчения последующего анализа другой неизмеримое вспомогательное слагаемое определяется как
|
(111) |

Производная по времени от уравнения (11) задается следующим образом:
|
(112) |

После сложения и вычитания уравнения (111) система ошибок с замкнутым контуром в уравнении (109) может быть выражена следующим образом
|
(113) |

где
неизмеримый вспомогательный член 3
 определяется
как
определяется
как
|
(114) |

На основе выражений в уравнениях (112) и (112) могут быть разработаны следующие:
|
(115) |

где
 выбираются как достаточно большие
положительные константы.
выбираются как достаточно большие
положительные константы.
Разработанный
контроллер реализован на фрезерном
станке с использованием написанного
пользователем сервоалгоритма,
предоставляемого Turbo
PMAC2
(контроллер). Поскольку система привода
подачи x-y
на HSM2
представляет собой двумерную контурную
систему, параметризация, основанная на
направлении подачи (см. рис.49), может
быть использована для представления
матрицы преобразования координат
.
Пусть
 − угол наклона между желаемым вектором
скорости
− угол наклона между желаемым вектором
скорости
 и осью x,
тогда
можно представить как
и осью x,
тогда
можно представить как
|
(116) |


Рисунок 49
Для линейного контура матрица R в уравнении (81) является нулевой матрицей. Для кругового контура,
|
(117) |

где − радиус окружности. Для общей двумерной траектории R представляет собой матричную функцию угла наклона .
Для
двумерного случая вектор неизвестных
постоянных параметров системы, θ в
уравнение (85) состоит из
 ,
где
,
где
 − эквивалентный
момент инерции для оси x,
− эквивалентный
момент инерции для оси x,
 − движущаяся масса для оси y,
− коэффициент вязкого трения для оси
x, а
− коэффициент вязкого трения для оси
y. Для начальной оценки наилучшего
предположения,
− движущаяся масса для оси y,
− коэффициент вязкого трения для оси
x, а
− коэффициент вязкого трения для оси
y. Для начальной оценки наилучшего
предположения,
 в уравнении (89), значения, полученные с
помощью идентификации системы в
используются из предыдущей главы 3.
в уравнении (89), значения, полученные с
помощью идентификации системы в
используются из предыдущей главы 3.
Учитывая
 в уравнении (88), пусть
в уравнении (88), пусть
 будет
будет
 для простоты. Затемс помощью предыдущих
уравнений,
может быть выражено следующим образом
для простоты. Затемс помощью предыдущих
уравнений,
может быть выражено следующим образом
|
(118) |
|
|
|
|
|
|
|






Ввод управляющего усилия в уравнении (118) может быть описан как компонент с перекрестной связью (т.е. первый набор условий), пропорциональный компонент (т.е. второй набор условий), производный компонент (т.е. третий набор условий) и адаптивный компонент с прямой связью (т.е. четвертый набор условий). Для двумерного кругового контура, уравнение (116) и уравнение (117) может быть использовано для выражения перекрестно связанной составляющей уравнения (118) a
|
(119) |





Поскольку второе и третье слагаемые в уравнении (118) представляют пропорционально-производный (PD) контроллер, для этого используются контроллеры PD, разработанные в предыдущих разделах. Коэффициенты усиления, которые привели к наилучшей производительности в круговых контурах, определяются следующим образом
|
(120) |

Разработанный УЭ нелинейной перекрестной связи представлен на рис. 50.
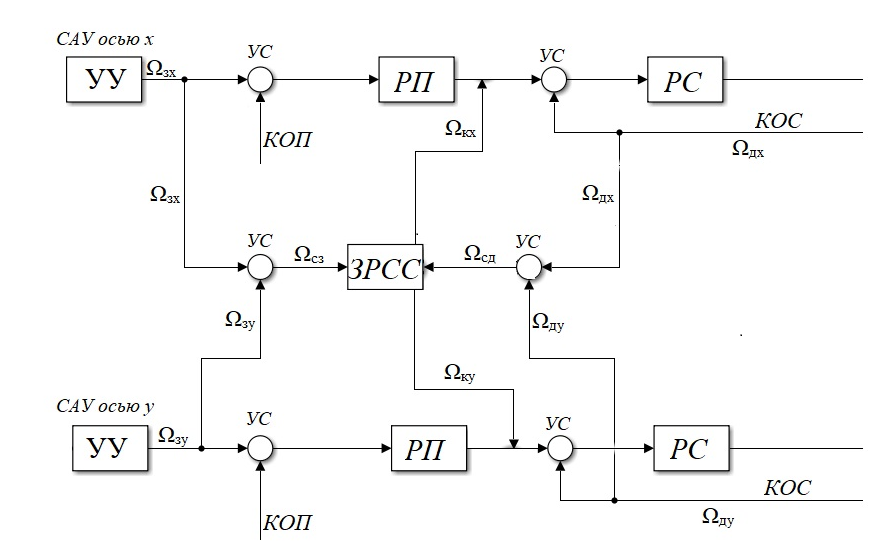
Рисунок 50