7. Структурные схемы. Основные элементы структурных схем. Правила преобразования структурных схем.
Основные правила составления и преобразования структурных схем
Структурная схема — это совокупность элементарных звеньев объекта и связей между ними.
Передаточная функция каждого звена направленного действия представляет собой записанное в операторной форме и разрешённое относительно изображения выходной величины дифференциальное уравнение данного звена.
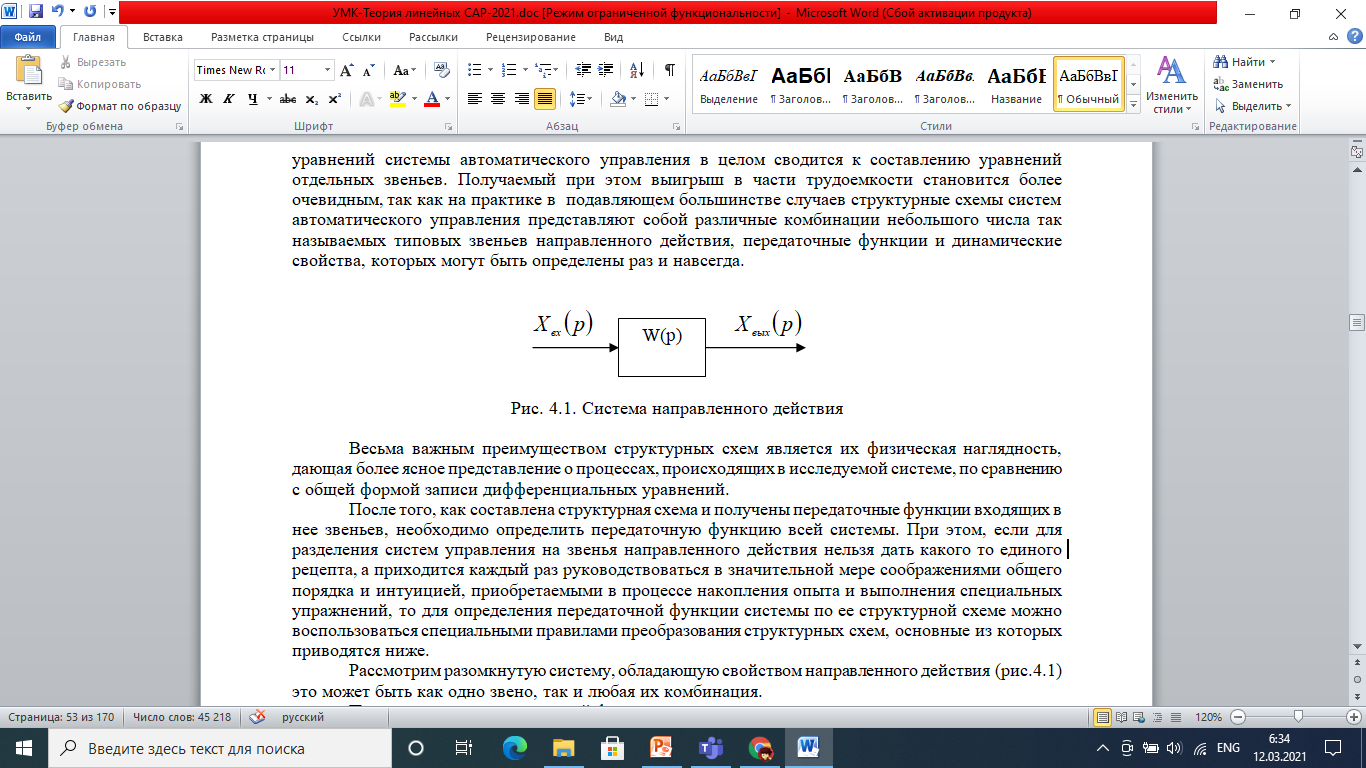
Рис. 7.1. Система направленного действия
Весьма важным преимуществом структурных схем является их физическая наглядность, дающая более ясное представление о процессах, происходящих в исследуемой системе, по сравнению с общей формой записи дифференциальных уравнений.
После того, как составлена структурная схема и получены передаточные функции входящих в неё звеньев, необходимо определить передаточную функцию всей системы.
1. Последовательное включение

Рис.7.2. Последовательное включение звеньев направленного действия.
Передаточная функция последовательно включённых звеньев равняется произведению передаточных функций отдельных звеньев.
2. Параллельное согласное включение. Параллельным согласным включением звеньев направленного действия считается такое, при котором входная величина системы подаётся параллельно на входе всех звеньев, а их выходные величины алгебраически суммируются на выходе системы.
На рис.7.3. изображён частный случай параллельного согласного включения трех звеньев направленного действия.
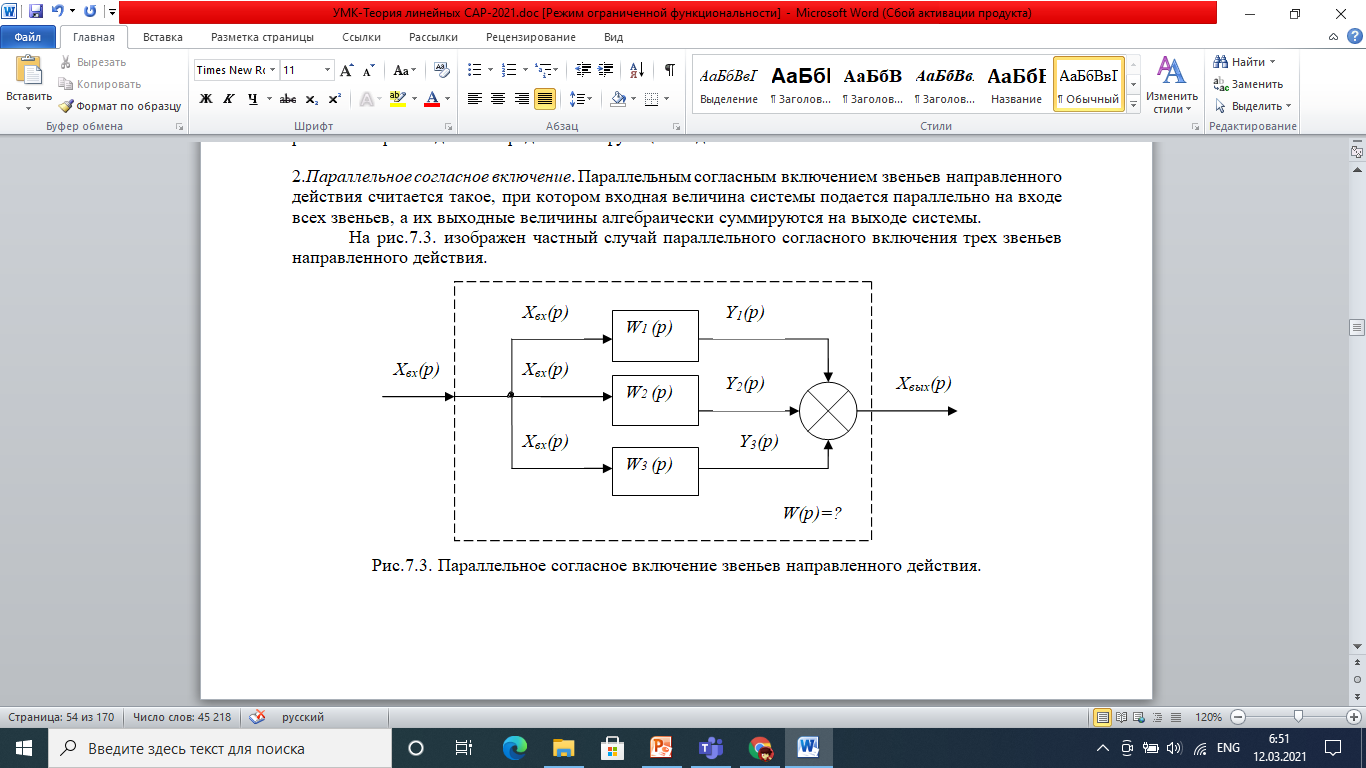
Рис.7.3. Параллельное согласное включение звеньев направленного действия

Таким образом, передаточная функция параллельных согласно включенных звеньев направленного действия равняется алгебраической сумме передаточных функций отдельных звеньев.
3. Параллельное встречное включение (обратная связь). Рассмотрим сначала основной случай – отрицательную обратную связь.
На рис. 7.4. изображена структурная схема замкнутый системы автоматического управления в наиболее общем виде, где G (p) и Z(p) - передаточные функции соответственно прямой цепи системы и цепи обратной связи.
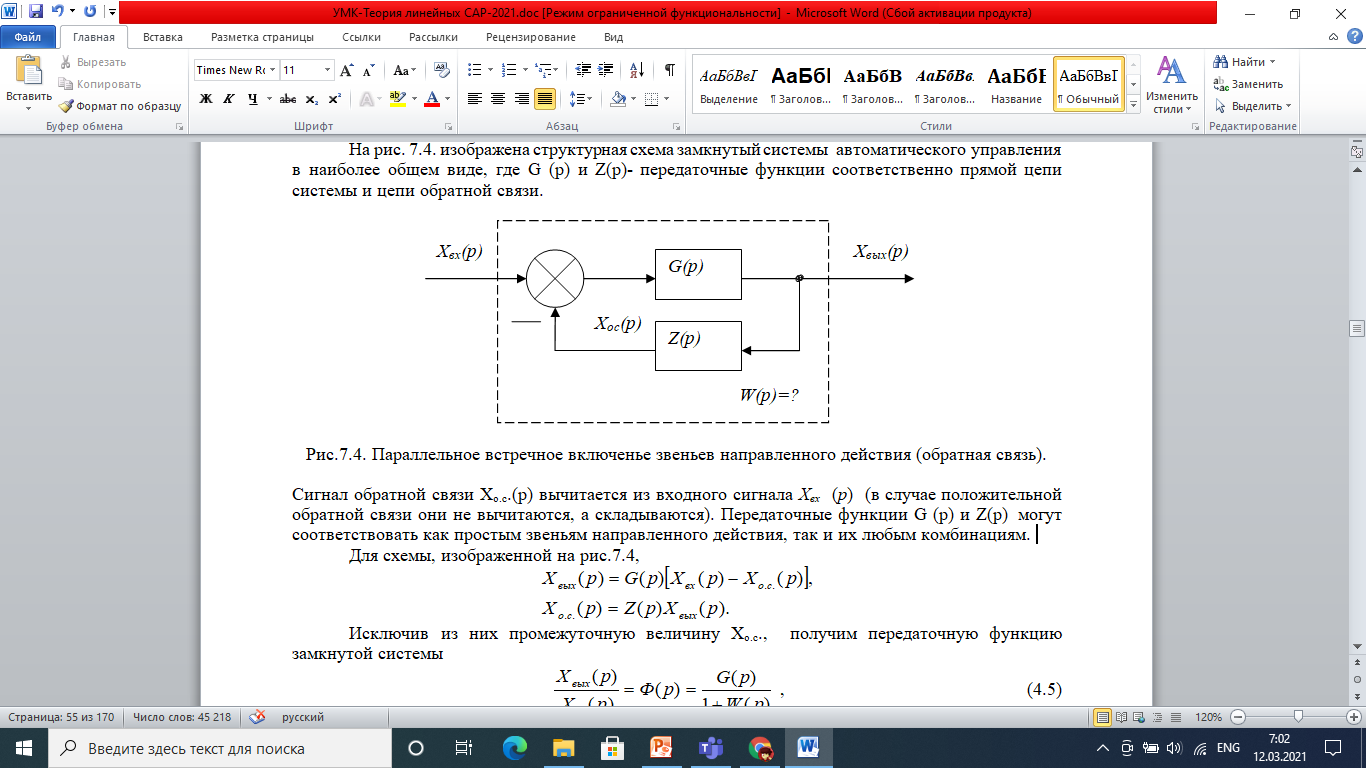
Рис.7.4. Параллельное встречное включенье звеньев направленного действия (обратная связь).
Сигнал обратной связи Хо.с.(р) вычитается из входного сигнала Хвх (р) (в случае положительной обратной связи они не вычитаются, а складываются). Передаточные функции G(р) и 2(р) могут соответствовать как простым звеньям направленного действия, так и их любым комбинациям.
Для схемы, изображённой на рис.7.4,

Исключив из них промежуточную величину Хо.с. получим передаточную функцию замкнутой системы

Где
![]()
есть передаточная функция разомкнутой системы. Смысл последнего названия становится понятным, если мысленно разомкнуть контур управления в любом месте и, «выпрямив» его, рассматривать прохождение сигнала, поданного в месте размыкания, по цепочке последовательно включенных звеньев направленного действия.
При положительной обратной связи вместо плюса в знаменателе надо поставить минус.
Итак, передаточная функция замкнутой системы автоматического управления равняется отношению передаточной функции прямой цепи к увеличенной на единицу передаточной функции разомкнутой системы.
В действительности, кроме управляющего входного воздействия, всякая реальная система подвержена различным возмущающим воздействиям (колебания нагрузки, нестабильность характеристик элементов, помехи и т.д.), которые могут поступать в систему в любом месте. Для учёта их влияния нужно уметь при помощи структурной схемы устанавливать зависимости между этими возмущениями и изменениями управляемой (выходной) величины системы.
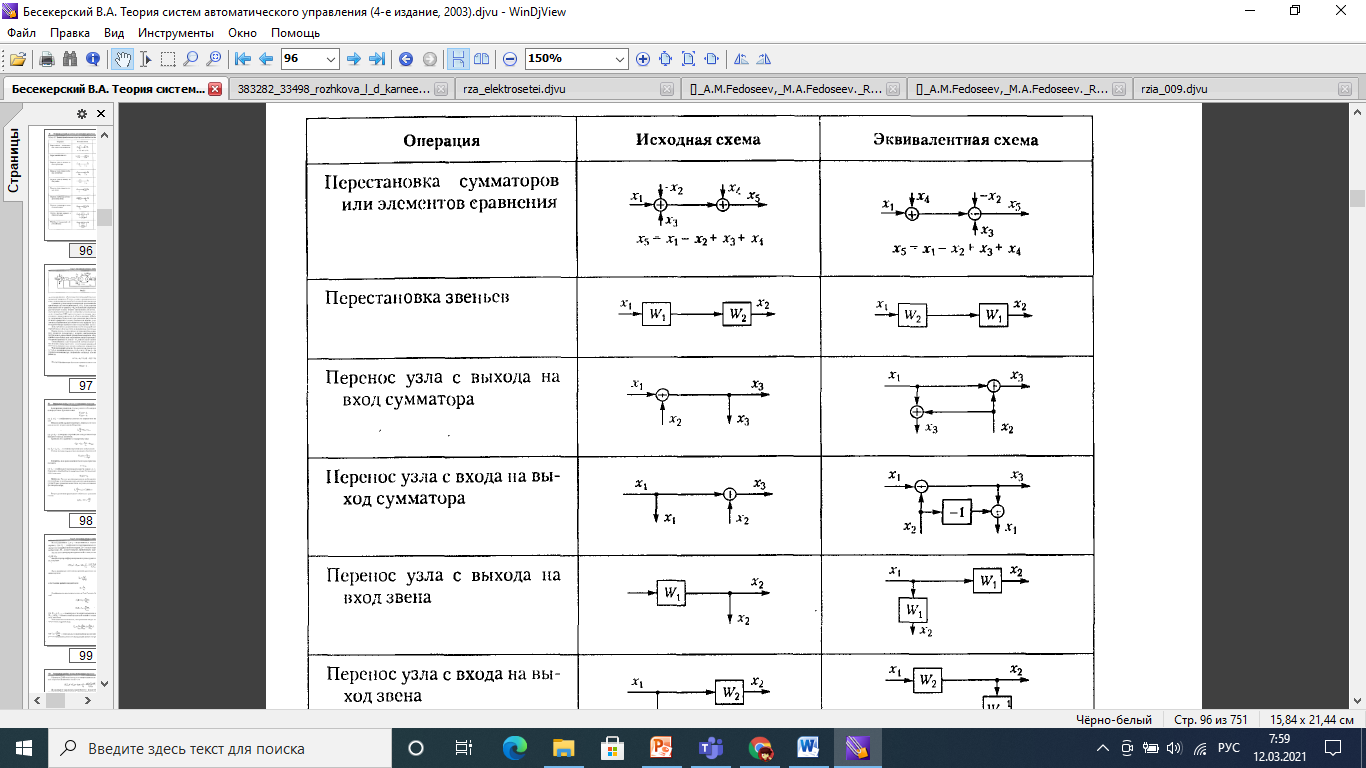
Если исходная структурная схема многоконтурная и содержит перекрёстные связи, то для её свёртывания к одноконтурной приходится применять, кроме трех главных правил, вспомогательные правила структурных преобразований, представленных в таблице 7.2.
Таблица.7.2. Правила преобразования структурных и линейных систем