

Вопросы 5-7 общая часть:
Математическое описание элементов и систем автоматического управления
Для математического описания работы САУ удобно разбивать её не на функциональные элементы автоматики, а на динамические звенья. Поэтому вводится понятие динамического звена.
Динамическим звеном называется часть системы управления, либо вся система, описываемая дифференциальным (или иным) уравнением определенного вида. Приведённое определение является общим. Под него подходит любой элемент автоматики, совокупность таких элементов и даже вся система автоматического управления в целом.
Связь входа и выхода
Существует некоторое правило, по которому элемент преобразует вход x в выход y. Это правило называется оператором.
Запись y = U[x] означает, что выход y получен в результате применения оператора U ко входу x.
Построить модель – это значит найти оператор, связывающий входы и выходы.
Модель – это объект, который мы используем для изучения другого объекта (оригинала).
Обычно оператор дифференцирования
обозначается буквой p. Интегрирование
это 1/p.
Запись
 внешне выглядит как «умножение» оператора
p на сигнал
внешне выглядит как «умножение» оператора
p на сигнал
 ), но на самом деле обозначает действие
этого оператора, то есть дифференцирование:
), но на самом деле обозначает действие
этого оператора, то есть дифференцирование:

5. Что такое линеаризация характеристики звена системы регулирования? в чем её польза? При выполнении каких условий она допустима?
Замена точного значения приращения
функции её дифференциалом в окрестности
 принято называть линеаризацией
зависимости
принято называть линеаризацией
зависимости
 .
.
Линеаризацию удобнее производить по звеньям.
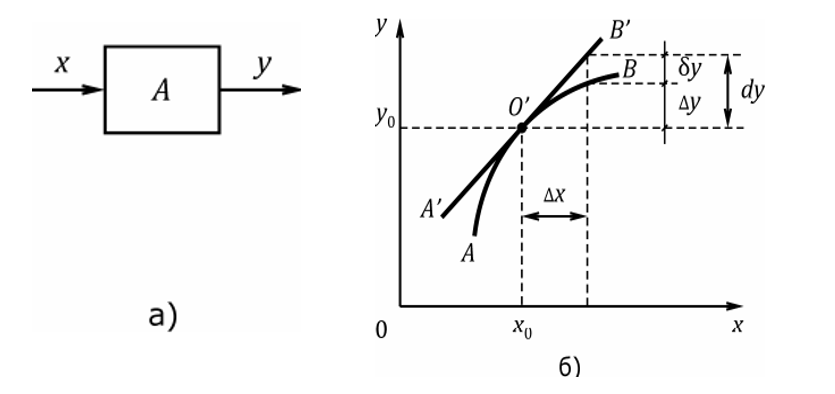
Геометрически линеаризация нелинейной
зависимости между переменными x
и y (см. рис. 2.1 б) означает
замену исходной кривой AB
отрезком её касательной
 в точке
в точке
 ,
соответствующей заданному режиму, и
параллельному переносу начала координат
в эту точку.
,
соответствующей заданному режиму, и
параллельному переносу начала координат
в эту точку.
Её польза – представление сложной функции в виде линейных участков для упрощения выполнения математических операций с ними.
Линеаризация допустима только при существовании производной в данной точке. Если же вдруг там происходит в функции скачок, то тут мы и представляем нашу функцию в виде вертикальной прямой. Так же линеаризация недопустима если у нас из-за этого очень сильно снижается точность и сильно искажаются кривые процессов.
6. Дифференциальное уравнение системы. Поясните суть стандартной формы дифференциального уравнения системы регулирования
Порядок составления дифференциального уравнения динамического звена
Порядок составления дифференциального уравнения звена:
1. Определяют входную (-ые) и выходную (-ые) величины (координаты) звена и устанавливают дополнительные факторы, от которых зависит выходная величина.
2. Используя основные законы той отрасли науки и техники, к которой относится исследуемое звено:
законы Кирхгофа для электрических звеньев;
законы Ньютона для звеньев механической природы;
законы сохранения энергии и вещества для гидравлических и пневматических звеньев, составляют математическое описание звена в форме дифференциального уравнения.
3. Вводят те или иные упрощающие предположения (допущения) с целью упрощения исходного математического описания.
4. При необходимости осуществляют линеаризацию полученного дифференциального уравнения с целью получения линейного дифференциального уравнения звена.
Стандартная форма записи дифференциальных уравнений. Передаточные функции систем регулирования
Процессы в линейных системах автоматического регулирования и их элементах обычно описываются дифференциальными уравнениями. При этом члены, содержащие выходную величину y и её производные, записываются в левой части уравнения, а воздействия x и их производные, и cf (величины, учитывающие внутренние параметры и возмущающее воздействие) – в правой:
 (2.1)
(2.1)
Здесь
 ,
и
,
и
 –
коэффициенты (параметры) уравнения. В
большом числе случаев их можно принять
постоянными. В тех случаях, когда они
изменяются во времени, а скорость этого
изменения соизмерима со скоростью
процессов управления в системе, то эту
систему принято называть нестационарной,
или системой с переменными параметрами.
–
коэффициенты (параметры) уравнения. В
большом числе случаев их можно принять
постоянными. В тех случаях, когда они
изменяются во времени, а скорость этого
изменения соизмерима со скоростью
процессов управления в системе, то эту
систему принято называть нестационарной,
или системой с переменными параметрами.
Уравнение (2.1) системы регулирования удобно представить в символической (операторной) форме, заменив символ дифференцирования оператором p:

тогда
 .
(2.2)
.
(2.2)
Разделив все члены полученного уравнения
на коэффициент
 при выходной переменной y,
получим стандартную форму дифференциального
уравнения системы регулирования:
при выходной переменной y,
получим стандартную форму дифференциального
уравнения системы регулирования:
 (2.3)
(2.3)
Здесь
 ;
;


 .
.
Многочлен, стоящий в скобках при выходной
переменной y,
принято называть собственным
(характеристическим) оператором, а при
входной величине x
– входным оператором, или оператором
воздействия. Коэффициенты
 ,
имеющие размерность времени, называют
постоянными времени.
,
имеющие размерность времени, называют
постоянными времени.
Операция замены
 носит название алгебраизации
дифференциального уравнения (2.1). В
линейных системах с постоянными
параметрами звеньев она формально
соответствует преобразованию Лапласа,
в котором функции
носит название алгебраизации
дифференциального уравнения (2.1). В
линейных системах с постоянными
параметрами звеньев она формально
соответствует преобразованию Лапласа,
в котором функции
 ,
заданной во времени t и
называемой оригиналом, ставится в
соответствие функция
,
заданной во времени t и
называемой оригиналом, ставится в
соответствие функция
 комплексной переменной p,
определенная интегралом
комплексной переменной p,
определенная интегралом

и называемая изображением функции по Лапласу.