

31. Синтез методом логарифмических частотных характеристик. Лачх и лфчх тдз и систем (метод Солодовникова).
Синтезом системы автоматического регулирования называется выбор структурной схемы и значений параметров её отдельных звеньев, обеспечивающих заданную точность в установившемся режиме и характер переходного процесса, удовлетворяющий заданным показателям качества.
Практически синтез систем автоматического регулирования сводится к выбору общего коэффициента усиления системы для обеспечения заданной точности в установившемся режиме и к синтезу корректирующих устройств для обеспечения заданных показателей качества переходного процесса.
Существует несколько методов синтеза линейных систем автоматического регулирования. Если при синтезе требуется обеспечить ограниченное число показателей качества, то для выбора параметров можно воспользоваться методом распределения корней или методом распределения нулей и полюсов передаточной функции, методом интегральных оценок.
Этапы синтеза:
составление функциональной схемы САУ из функционально необходимых элементов;
составление структурной схемы проектируемой САУ;
математическое описание функциональных элементов схемы – представление их соответствующими динамическими звеньями;
представление САУ как совокупности обобщённого объекта и регулятора;
выбор закона регулирования;
расчёт параметров настройки типовых регуляторов;
математическое описание замкнутой САУ;
расчёт переходных процессов замкнутой САУ;
сравнение численных значений показателей качества спроектированной САУ требуемыми по техническому заданию показателями качества; вывод о соответствии спроектированной САУ техническому заданию.
Синтез методом логарифмических частотных характеристик. Лачх и лфчх тдз и систем.
Выбор корректирующих устройств согласно этому методу осуществляется в следующем порядке. Строят логарифмические амплитудную (ЛАЧХ) и фазовую частотные (ЛФЧЧ) характеристики разомкнутой нескорректированной системы.
На том же графике строят желаемую логарифмическую амплитудную частотную характеристику, соответствующую системе, отвечающей заданным техническим требованиям, которые могут быть различными, но в общем могут содержать следующие показатели:
порядок астатизма системы (количество интегрирующих звеньев, входящих в систему);
максимальную величину перерегулирования, 𝛿% вызываемого ступенчатым воздействием;
максимальное время переходного процесса t0, вызываемого ступенчатым воздействием;
максимальное ускорение 𝑎𝑚𝑎𝑥, с которым изменяется регулируемая величина при ступенчатом воздействии, и ряд других показателей.
Чтобы иметь возможность построить желаемую амплитудную частотную характеристику вместо реальной вещественной частотной характеристики, В. В. Солодовников предложил пользоваться приближенной типовой вещественной частотной характеристикой, которая изменением своих параметров может быть сделана достаточно близкой к реальной характеристике.
И вот дальше идёт пояснение и номограмма, про которую она говорила, что всё надо знать, но там ебануться сколько текста.
Типовая вещественная частотная характеристика приведена на рис. 12.1. Она определяется следующими параметрами:





Соответствующие обозначения ω ясны из рис. 12.1.
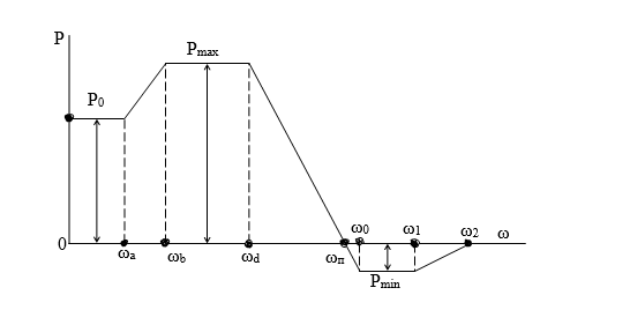
Рис. 12.1. Типовая вещественная частотная характеристика
Динамические свойства системы рассматриваются при подаче на вход единичного ступенчатого воздействия.
При построении желаемой амплитудной частотной характеристики ее можно разбить на три характерных участка.
Участок низких частот, лежащий в пределах частот от нуля до первой сопрягающей частоты. Для статических систем наклон низкочастотной части логарифмической амплитудной частотной характеристики должен составлять 0 дб/сек, для астатических — 20ν дб/дек (ν — число интегрирующих звеньев в системе, или порядок астатизма системы).
В обоих случаях ордината низкочастотной асимптоты при частоте ω=1 должна составлять 20 lg К (К — общий коэффициент усиления разомкнутой системы).
За низкочастотную часть желаемой характеристики можно принять низкочастотную часть характеристики нескорректированной системы. Этот участок характеристики определяет точность воспроизведения системой медленно меняющихся воздействий.
Участок, расположенный в области средних частот и определяющий запас устойчивости системы, и ее качество при ступенчатом воздействии. В зоне средних частот должно происходить пересечение амплитудной характеристики с осью абсцисс при частоте, которая называется частотой среза ωс.
Для обеспечения достаточного запаса устойчивости желаемая частотная характеристика при частоте среза ωс должна иметь наклон — 20 дб/дек.
Участок высоких частот, мало влияющий на качество переходного процесса, может не корректироваться.
Сопряжение среднечастотного участка желаемой характеристики с соседними может осуществляться непосредственно или, если это возможно, с помощью прямых, имеющих наклон 40 или 60 дб/дек.
Частота среза ωс в среднечастотном диапазоне определяется, исходя из заданных δ% и t0, по номограмме, приведённой на рис. 12.2.
По заданному δ% определяется
максимальная ордината Pmах
вещественной частотной характеристики,
соответствующей желаемой амплитудной
частотной характеристике. При значении
Рmах
находим ординату кривой t0
= f(Pmax).
Ордината равна
 и в то же время определяет заданное
значение 𝑡0.
и в то же время определяет заданное
значение 𝑡0.

Рис. 12.2. Номограмма для определения частоты среза
Таким образом

откуда

Скорректированная система, чтобы обеспечить удовлетворительную работу, должна иметь определенный запас устойчивости по амплитуде и по фазе.
Так как скорректированная система является минимально-фазовой, то качество однозначно определяется амплитудной частотной характеристикой.