

25. Статический режим систем автоматического управления. Понятие статического и стационарного режима. Статизм.
Как и всякая динамическая система, САУ может находиться в одном из двух режимов - стационарном (установившемся) и переходном. В свою очередь стационарный режим так же подразделяется на два вида - статический и динамический.
Статический режим (статика) – это режим, при котором система находится в состоянии покоя вследствие того, что все внешние воздействия и параметры самой системы не меняются во времени.
Динамический стационарный режим возникает, когда приложенные к системе внешние воздействия изменяются по какому-либо установившемуся закону, в результате чего система приходит в режим установившегося вынужденного движения.
Регулирование называется статическим, если установившееся после окончания переходного процесса значение регулируемой величины при различных постоянных значениях нагрузки будет принимать также различные постоянные значения, зависящие от нагрузки.
Регулятор, осуществляющий статическое регулирование, называется статическим регулятором.
Для характеристики степени зависимости отклонения регулируемой величины от нагрузки в теории регулирования пользуются понятием неравномерности или статизма регулирования.
Пусть график зависимости установившихся значений регулируемой величины x от нагрузки q, который будем называть характеристикой регулирования, имеет вид, представленный на рис. 7.2.
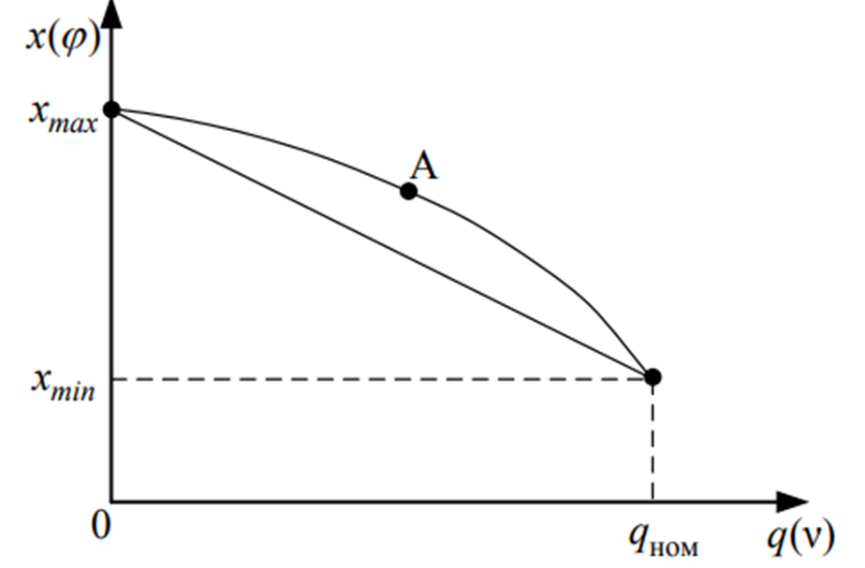
Рис. 7.2. График зависимости установившихся значений регулируемой величины x от нагрузки q (характеристика регулирования)
Для определения неравномерности (статизма) регулирования воспользуемся относительными координатами:

Неравномерностью (статизмом) регулирования δ в данной точке А называют относительную крутизну характеристики регулирования в этой точке:
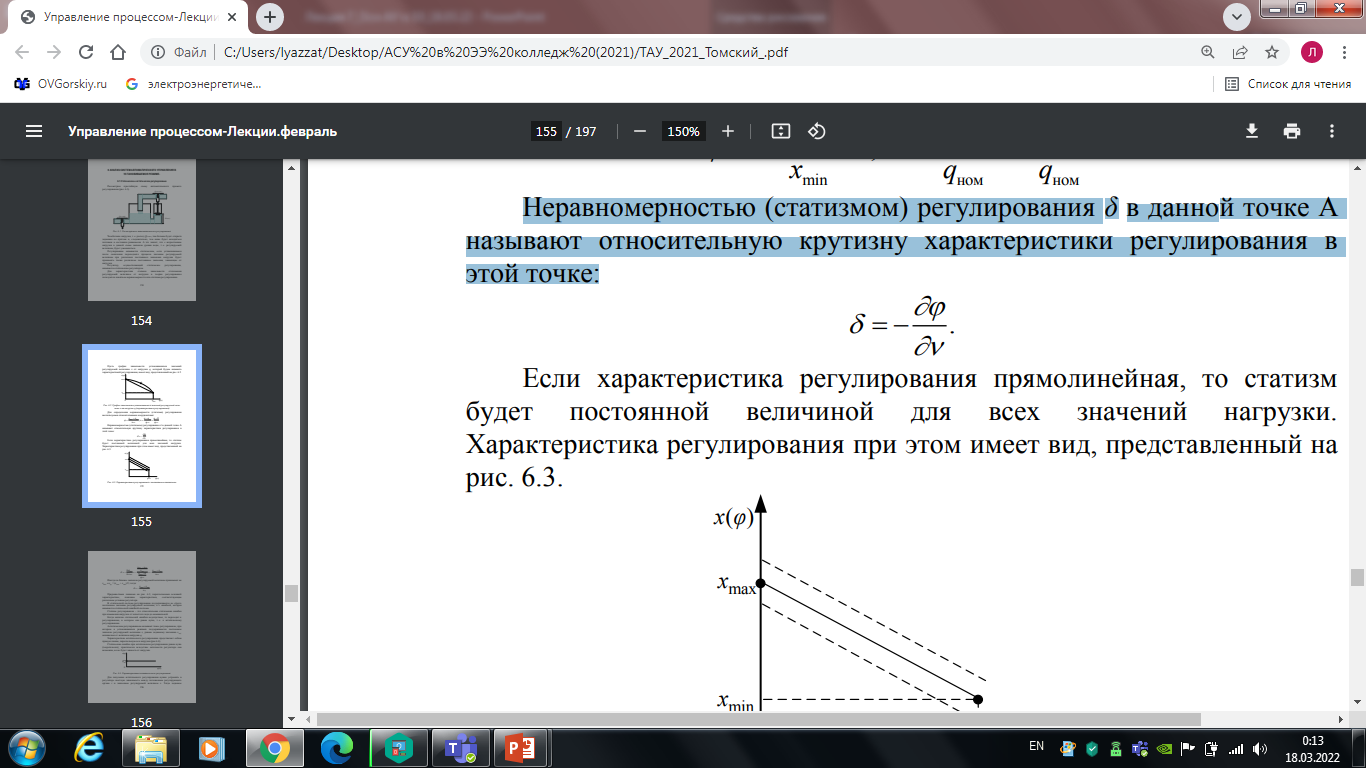
Если характеристика регулирования прямолинейная, то статизм будет постоянной величиной для всех значений нагрузки. Характеристика регулирования при этом имеет вид, представленный на рис. 7.3.

Рис. 7.3. Характеристика регулирования с постоянным статизмом

Иногда за базовое значение регулируемой
величины принимают не
 ,
а
,
а
 ,
тогда:
,
тогда:
Прерывистыми линиями на рис. 7.3, параллельными основной характеристике, показаны характеристики, соответствующие различным уставкам регулятора.
В статической системе регулирования поддерживается не строго постоянное значение регулируемой величины, а с ошибкой, которая называется статической ошибкой системы. Статизм регулирования – это относительная статическая ошибка при изменении нагрузки от холостого хода до номинальной.
Когда наличие статической ошибки недопустимо, то переходят к регулированию, в котором она равна нулю, т. е. к астатическому регулированию.
26. Статический режим систем автоматического управления. Способы устранения статического отклонения.
Статический режим (статика) – это режим, при котором система находится в состоянии покоя вследствие того, что все внешние воздействия и параметры самой системы не меняются во времени.
В статической системе регулирования поддерживается не строго постоянное значение регулируемой величины, а с ошибкой, которая называется статической ошибкой системы. Статизм регулирования – это относительная статическая ошибка при изменении нагрузки от холостого хода до номинальной.
Когда наличие статической ошибки недопустимо, то переходят к регулированию, в котором она равна нулю, т. е. к астатическому регулированию.
Астатическим регулированием называют такое регулирование, при котором в установившихся режимах поддерживается постоянное значение регулируемой величины x, равное заданному значению xзад, независимо от величины нагрузки q.
Характеристика астатического регулирования представляет собою прямую линию, параллельную оси нагрузки (рис 7.5). Статическая ошибка при астатическом регулировании равна нулю (теоретически); практически вследствие неточности регулятора она возможна, но не будет зависеть от нагрузки.
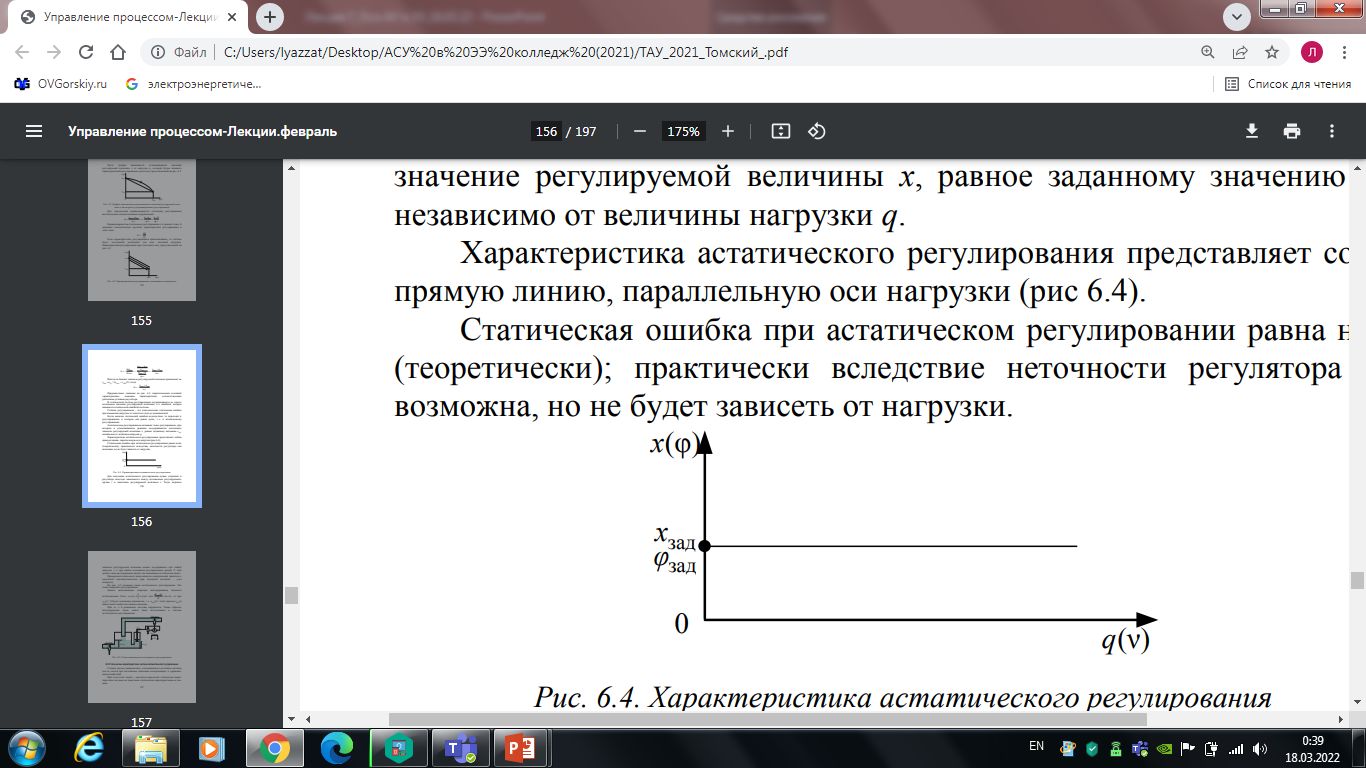
Рис. 7.5. Характеристика астатического регулирования
Интегрирующее звено может быть использовано в системе астатического регулирования.
Второй способ устранения статического отклонения: введение компенсирующего воздействия.
Регулирование по возмущению (компенсацию возмущения) применяют, когда возмущения Z, которые вызывают существенное отклонение регулируемой величины y(t) от заданного значения x0(t), удаётся измерить, после чего по результатам этих измерений так скорректировать алгоритм управления объектом регулирования ОР, чтобы ошибка регулирования стала минимальной. С этой целью, кроме естественно существующего канала передачи возмущения Z и обусловленного самой физикой работы ОР, организуется дополнительный искусственный канал передачи компенсирующего сигнала xk, воздействующий через измерительное устройство (узел компенсации УК) так, чтобы действие xk было равнопротивоположным действию возмущения Z.
Дальше идёт фигня, которую в этом вопросе не просят. Но зная Байназарову, она может легко это спросить как просто так, так и в качестве дополнительных вопросов)))