

Distantsionny_kontrol_psikhofiziologicheskogo_sostoyania_s_pomoschyu_sverkhshirokopolosnoy_RLS
.pdf121
Сытник О.В., Вязьмитинов И.А., Мирошниченко Е.И., Копылов Ю.А., Амосова А.И., Пазынин
В.Л., Сиренко К.Ю.
3.2. Обнаружение и идентификация людей за оптически непрозрачными преграда-
ми с использованием квазинепрерывных, псевдослучайных, широкополосных сигна-
лов
3.2.1. Введение.
Проблема создания технических средств для оперативного поиска и обнаружения людей, по-
страдавших при техногенных и природных катастрофах, остается актуальной, несмотря на многочис-
ленные попытки ее решения.
Класс радиолокационных станций (РЛС), которые используются для решения задач поиска и обнаружения людей под завалами, относится к РЛС ближнего действия. Под термином «РЛС ближ-
него действия» будем понимать РЛС, которая обнаруживает цели на расстояниях от единиц до десят-
ков метров от фазового центра антенны при условии, что цель находится в зоне Фраунгофера.
Одним из наиболее характерных информационных признаков наличия цели в исследуемой об-
ласти пространства является фазовая модуляция эхо-сигнала, обусловленная доплеровским эффектом при перемещении отдельных частей тела (движение конечностей, туловища, грудной клетки при ды-
хании и сердцебиении). Основная задача таких РЛС состоит в выделении информационного сигнала на фоне помех, обусловленных отражениями зондирующего сигнала от местных предметов, преград,
на трассе распространения, и последующего принятия решения о наличии или отсутствии цели в ис-
следуемой области пространства. При этом к помехам, которые оказывают наибольшее влияние на вероятность правильного обнаружения относятся отражения зондирующих колебаний от подвижных объектов вне зоны ответственности локатора (отражения от человека, который управляет РЛС – опе-
ратора, окружающих локатор веток деревьев, посторонних людей, отражения от которых попадают на вход приемника РЛС по боковым лепесткам антенны, работающей техники и т.п.).
3.2.2. Концепции построения радиофизических систем для обнаружения биообъектов.
В настоящее время наметилось три основных концепции в построении радиолокационных си-
стем дистанционного зондирования человека за препятствием. Это системы с применением, так называемых, сверхширокополосных импульсных видеосигналов (СШП-сигналы) [40, 67, 39, 41, 126, 88, 79, 32, 195, 240, 162, 121], пространственно разнесенные двухпозиционные и мультипозиционные
122
активно-пассивные системы [121, 128] и РЛС с квазинепрерывными и непрерывными излучениями
[221, 238, 23, 220].
Первый класс систем строится по принципу импульсных РЛС, задающий генератор которых формирует короткие (как правило, длительностью единицы наносекунд) видеоимпульсы. Эти им-
пульсы затем дифференцируются антенной локатора и излучаются в пространство. Спектр таких сиг-
налов достаточно широк (может достигать единиц гигагерц), что обуславливает высокое разрешение РЛС по дальности. Малое расстояние до цели позволяет применять в РЛС, без потери однозначности,
высокую (до единиц мегагерц) частоту повторения зондирующих импульсов, что дает возможность организовать эффективное накопление сигнала при его обработке. Однако этому классу систем при-
сущи и принципиальные недостатки. В частности, при распространении СШП-сигналов в дисперги-
рующих средах наблюдается разрушение импульса, что в конечном итоге снижает соотношение сиг-
нал/шум и вероятность правильного обнаружения. Кроме того, для СШП-сигналов практически от-
сутствуют эффективные направленные антенны, что приводит к дополнительным потерям и возрас-
танию уровня когерентных помех от местных предметов, находящихся вне зоны ответственности РЛС. Это в значительной мере ограничивает круг решаемых задач и удобство использования таких РЛС. Антенна РЛС обычно должна находится непосредственно у препятствия и желательно, чтобы она была с ним согласована, что очевидно, трудно выполнить в реальных условиях.
Пространственно-разнесенные системы основаны, как правило, на известном принципе базово-
корреляционной системы локации. Они перспективны в плане потенциальной возможности локали-
зации местоположения цели по двум координатам одновременно и по возможности подавления по-
мех от местных предметов. Недостатком таких систем является их техническая сложность, невоз-
можность оперативного использования в реальных условиях и неоднозначность, возникающая при одновременной обработке сигналов принятых несколькими пространственно-разнесенными пункта-
ми.
РЛС с квазинепрерывным и непрерывным зондирующим сигналом, как показали наши иссле-
дования [221, 238, 23, 220], повидимому, являются наиболее перспективными именно для решения задач поиска и обнаружения людей под завалами зданий и сооружений, в снежных лавинах и песча-
ных осыпях. При относительно низкой мощности зондирующего сигнала (десятки или сотни милли-
ватт) за время наблюдения в единицы секунд удается добиться значительного потенциала локатора
123
(порядка 100-140 дБ) относительно простыми техническими средствами. Малогабаритность аппара-
туры, незначительные размеры антенн (в рабочем диапазоне частот 0,9-1,8 ГГц) и низкое энергопо-
требление позволяют использовать такие локаторы непосредственно каждым спасателем индивиду-
ально и в составе комплекса аппаратуры с дистанционным управлением. Возможность использования узконаправленных антенн позволяет осуществлять пространственную селекцию целей, повышая по-
мехоустойчивость РЛС. Применение сложных помехоустойчивых видов модуляции обеспечивает стробирование зоны ответственности РЛС по дальности с шагом от единиц до долей метров в режиме автоматического сканирования, что снижает вероятность пропуска цели. Кроме того, системы с не-
прерывным и квазинепрерывным зондирующим сигналом легко реализуют истинно когерентную об-
работку сигналов. Одним из существенных недостатков подобных РЛС является необходимость ис-
пользования двух близко расположенных друг от друга антенн приемника и передатчика РЛС, что порождает проблемы развязки между ними. Поэтому для систем с непрерывным или квазинепрерыв-
ным сигналом антенная система представляет важный основной элемент, определяющий тактико-
технические характеристики РЛС в целом. Интеллектуальная обработка сигналов, основанная на адаптивных методах стохастического анализа радиолокационной информации, сокращает время при-
нятия решения о наличии или отсутствии цели и повышает вероятность правильного обнаружения в сложной помеховой обстановке.
3.2.3. Методы идентификации биообъектов по сигналу когерентно-доплеровского радио-
локатора. Теория, математические модели и эксперимент.
Структурная схема РЛС и алгоритм ее функционирования.
Основным достоинством сигналов на основе кодов Мерсенна [98, 18, 30] (или псевдослучайных периодических М-последовательностей (ПСП)) является то, что период последовательности, опреде-
ляемый длительностью элементарного импульса и ее длиной, в данном случае, когда скорость цели мала, может быть очень большим, автокорреляционная функция такого сигнала, определяющая раз-
решение по дальности, имеет узкий пик, а уровень боковых лепестков обратно пропорционален длине последовательности. Способ формирования таких сигналов с точки зрения технической реали-
зации прост и состоит в использовании схем на сдвиговых регистрах с соответствующими обратными связями. Причем, число разрядов регистра растет с ростом длины последовательности пропорцио-
нально логарифму от ее длины. Эти особенности ПСП сигналов обуславливают предпочтительное их
124
применение в радиолокационной аппаратуре ближнего действия. Длительность элементарного импульса (символа кода ПСП) определяет разрешение целей по дальности и объём пространства, из которого селектируется полезный сигнал. Когерентное накопление сигналов в течение нескольких периодов ПСП позволяет снизить пиковую мощность передатчика до оптимального уровня с точки зрения максимизации соотношения сигнал/тепловой шум и минимизации перегрузки входных каскадов приемника, а периодичность и когерентная обработка обеспечивают хорошую селекцию за счет эффекта Доплера. При этом потенциал РЛС и к.п.д. системы в целом могут быть значительно выше, чем при импульсной модуляции.
Таким образом, можно сформулировать основные требования к техническим характеристиками, которым должна удовлетворять РЛС обнаружения людей под завалами. Основные показатели РЛС сведены в табл. 3.1.
Техническая реализация РЛС ближнего действия, используемой для обнаружения человека за преградой, с такими показателями достаточно сложна, поскольку на корреляционные свойства квазинепрерывного зондирующего сигнала на основе кодов Мерсенна влияет качество его формирования в трактах передачи и приема, а также среда распространения.
Таблица 3.1.
№ |
Наименование показателя. |
Величина. |
Примечание. |
|
|
|
|
1 |
Диапазон |
1,5…3 ГГц |
|
|
|
|
|
|
Средняя мощность передатчи- |
|
Регулируется в зависимости от |
2 |
|
>50,0 мВт |
|
|
ка |
|
уровня местных помех. |
|
|
|
|
|
|
Порядка минус 170 |
|
3 |
Чувствительность приемника |
|
При полосе приемника до 5Гц. |
|
|
дБВт |
|
|
|
Фазовая манипуляция |
|
4 |
Модуляция |
|
|
|
|
кодом Мерсенна (ПСП) |
|
|
|
|
|
|
Ширина луча антенны по ази- |
|
|
5 |
|
150-250 |
Не менее 150 |
|
муту и углу места |
|
|
|
|
|
|
|
Разрешающая способность по |
|
|
6 |
|
1…2 м. |
|
|
дальности |
|
|
|
|
|
|
|
|
|
125 |
|
|
|
|
|
Дальность действия (до первой |
|
|
7 |
|
5…15 м. |
|
|
преграды) |
|
|
|
|
|
|
|
Протяженность зоны ответ- |
|
Нижнее значение в завалах бетон- |
8 |
ственности за первой прегра- |
1,5…7м. |
ных плит, верхнее значение в осы- |
|
дой |
|
пях сухих песков. |
|
|
|
|
|
Полоса фильтра доплеровской |
|
|
9 |
|
0,1…5 Гц. |
|
|
селекции |
|
|
|
|
|
|
|
Уровень боковых лепестков |
|
Число элементов ПСП N= 215 - 1 |
10 |
|
Не более минус 96 дБ. |
|
|
функции неопределенности |
|
либо N=217- 1 |
|
|
|
|
12 |
Объем |
8-10 дм3 |
|
|
|
|
|
13 |
Масса с источниками питания |
3…5 кг. |
|
|
|
|
|
Кроме того, ограниченное время накопления отраженных сигналов, обусловленное временем корреляции информационного процесса, увеличивает вероятность ложной тревоги и уменьшает со-
отношение сигнал/помеха за счет повышения уровня боковых лепестков автокорреляционной функ-
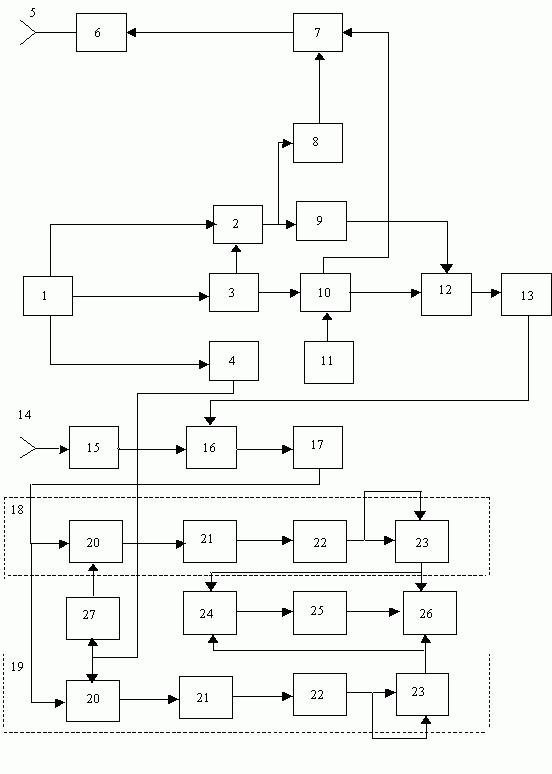
ции зондирующего сигнала. Структурная схема одного из вариантов портативного радиолокатора
[238, 23] , удовлетворяющего требованиям, приведенным в таблице, показана на рис. 3.10.
126
Рис.3.10. Структурная схема РЛС для обнаружения людей за преградами Как показано в работе [238],особенностью структуры РЛС с ПСП сигналами является необ-
ходимость формирования когерентных модулирующих функций как для приемного так и для пе-
редающего трактов локатора. Поэтому основой схемы является общий высокостабильный задаю-
щий генератор 1 с относительной нестабильностью частоты сигнала |
f |
10 5...10 6 на несущей |
|
f0 |
|
127
частоте примерно 2 ГГц. Выходной сигнал этого генератора одновременно подается на амплитуд-
ный модулятор 2 и два делителя 3 и 4 частоты с коэффициентами деления n 20 и m 10, соот-
ветственно. На другой вход амплитудного модулятора 2 поступают колебания с частотой 100 МГц с выхода делителя 3. Узкополосные фильтры 8,9, подключенные к выходу модулятора 2 выделяют колебания верхней (фильтр 8) и нижней (фильтр 9) боковых частот амплитудно-модулированного колебания. Разнос частот когерентных колебаний на выходах фильтров 8 и 9 при этом составляет
200 МГц. Колебания верхней боковой частоты используются в передатчике локатора для получе-
ния зондирующего сигнала, а колебания нижней боковой частоты для получения колебаний гете-
родина приемника. Зондирующий сигнал формируется на балансном модуляторе 7, усиливается усилителем мощности 6 до величины примерно минус 10дБВт и излучается передающей антенной
5 в пространство. На другой вход балансного модулятора 7 поступает модулирующая функция ПСП сигнала, формируемая генератором ПСП 10. Тактовая частота генератора ПСП образована из частоты задающего генератора 1 благодаря делителю частоты 3. В модуле генератора ПСП 10
цифровым методом формируется задержанный ПСП - модулирующий сигнал, используемый для получения поднесущего колебания с частотой около 1.3 кГц. Период поднесущего колебания при этом составляет ровно два периода ПСП сигнала. После их перемножения получается задержан-
ный на время з сигнал для формирования сигнала гетеродина. Схема 11 управляет величиной за-
держки ПСП гетеродина. Величина задержки определяет расстояние до цели. Сигнал гетеродина приемника образуется на выходе балансного модулятора 12, на входы которого поступают коге-
рентные с сигналом передатчика колебания, (с фильтра 9) и задержанная, промодулированная сигналом поднесущей, ПСП с выхода модуля 10. После усиления и фильтрации в модуле 13 сиг-
нал гетеродина поступает на балансный смеситель 16 (коррелятор). На другой вход смесителя 16
поступают принятые приемной антенной 14 колебания, отраженные от цели и усиленные мало-
шумящим усилителем 15 с коэффициентом шума до 2 дБ и коэффициентом усиления не более
10…15 дБ. На выходе смесителя 16 находится полосовой фильтр 17, с выхода которого информа-
ционный сигнал в полосе промежуточной частоты около 200 МГц поступает на два идентичных квадратурных канала 18, 19. На балансных смесителях 20 каждого канала производится перенос информационного сигнала на частоту поднесущего колебания 1.3 кГц с одновременным выделе-
нием соответствующей квадратурной компоненты сигнала за счет фазового сдвига сигнала гете-
128
родина на 900 в фазовращателе 27. Эти сигналы фильтруются с помощью полосовых фильтров 21,
усиливаются в узкополосных низкочастотных усилителях 22, после чего возводятся в квадраты в блоках 23 и суммируются в сумматоре 24. Решение о наличии или отсутствии цели принимается
(после выделения информационного сигнала в полосовых фильтрах 25) в решающем устройстве
26.
Эта схема показала удовлетворительную работоспособность и достаточно высокую чув-
ствительность к слабым сигналам от человека за преградой при высоком подавлении мешающих отражений от неподвижных местных предметов. Однако, при сравнительно простой ее структур-
ной схеме, техническая реализация отдельных блоков вызывает определенные трудности.
Требования к аппаратуре ужесточаются при стремлении получить идеальные сигналы при мо-
дуляции, излучении, распространении на сложной трассе, отражении, приеме и обработке сигналов.
На эффективность работы коррелятора оказывают влияние не только его собственные характеристи-
ки, которые без особого труда можно получить технически, а главное, степень идеальности подавае-
мых на него полезных сигналов. На уровень помех, при прочих равных условиях, влияет место и спо-
соб их возникновения при данной структурной схеме локатора. Основным недостатком структурной схемы РЛС рис.3.10 является паразитное просачивание сигнала передатчика на вход и коррелятор приемника. Поскольку подавить паразитную несущую в спектре ПСП сигнала на выходе модулятора больше, чем на 40…50 дБ, как правило, не удается, а узкополосная режекция приводит к неизбежным потерям в спектре ПСП, приходится применять различные методы подавления принятых на несущей сигналов и помех.
Методы идентификации биообъектов. Проблема идентификации живого объекта по совокуп-
ности косвенных признаков, связанных с параметрами наблюдаемого сигнала требует для своего ре-
шения набора адекватных моделей. Причем каждый элемент модели в процессе накопления инфор-
мации об исследуемом биообъекте должен допускать возможность оперативной (а в идеале и автома-
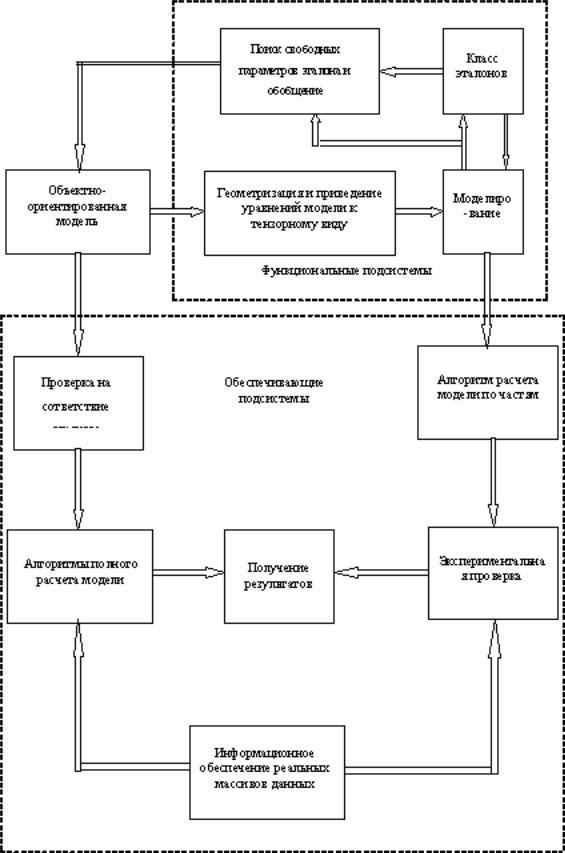
тической) модификации. В общем виде порядок представления сложной модели радиолокационного проявления биообъекта сводится к процедуре, показанной на рис.3.11. [102, 222]. Здесь выделено два класса подсистем: класс функциональных подсистем и класс обеспечивающих подсистем.
129
Под функциональными подсистемами будем понимать класс моделей, в основу которых поло-
жены соотношения, учитывающие физические процессы в исследуемом объекте, а также модели вза-
имодействия зондирующих сигналов с объектом. Обеспечивающие подсистемы – это класс моделей взаимодействия информационных потоков, возникающих при обмене данными в структуре функцио-
нальных подсистем, а также набор вспомогательных данных, как правило, числовых коэффициентов,
которые не являются принципиально необходимыми для построения функциональных подсистем, но,
в то же время, важны при расчете числовых характеристик.
При идентификации объекта с помощью объектно-ориентированной модели, представленной функциональной и обеспечивающей подсистемами, необходимо заранее установить соответствие между основными параметрами объекта и параметрами эталонов выбранного класса. Здесь возможны три ситуации:
1.взаимно однозначное соответствие, т.е. модель точно представляет структуру и процессы,
протекающие в объекте, и, следовательно, является полностью адекватной;
2.не все параметры исследуемого объекта представлены моделью, что означает неполную адекватность модели;
3.модель не полностью адекватна (или даже неадекватна), но допускается совершенствова-
ние модели по мере получения наблюдаемых данных – адаптивная модель.
Последняя ситуация реализуется на практике в тех случаях, когда эталоны из различных клас-
сов формируются на аналогичных уравнениях.
Основная трудность применения на практике объектно–ориентированных обобщенных моделей биообъектов заключается в установлении соответствия между уравнениями, описывающими процес-
сы внутри объекта, и внешними проявлениями объекта при его взаимодействии с зондирующими сигналами. Тем не менее, необходимость в разработке единого подхода к представлению и сравне-
нию моделей различных биообъектов и систем постоянно возрастает. Современные технические си-
стемы исследования биообъектов позволяют синхронно получать информацию, снимаемую с выхо-
дов различных датчиков. В частности, это может быть комплекс из нескольких РЛС например, таких как показано на рис.3.11, но работающих на различных частотах или комплекс ультразвуковых и ра-
диолокационных датчиков. При этом количество методов и алгоритмов обработки этой информации разрастается. Простая сумма локально оптимальных решений не дает в целом объективной картины,
130
если информация от каждого датчика анализируется независимо от информации полученной из дру-
гих источников.
Рис.3.11. Порядок взаимодействия элементов подсистем в сложной модели.