

Учебное пособие 800490
.pdf5.2.3. Устройство и назначение элементов гидроприводов
5.2.3.1. Насосы. Насосы служат для преобразования механической энергии, получаемой от электрического или двигателя внутреннего сгорания, в потенциальную энергию сжатой жидкости. В гидроприводе грузоподъемных машин в основном применяют шестеренчатые, лопастные, аксиально-поршневые, аксиально-плунжерные насосы. При сравнительно небольших габаритах эта группа насосов позволяет создавать в гидросистемах машин давление рабочей жидкости 5 … 32 МПа.
|
Шестеренчатые насосы |
по конструкции |
|
|
наиболее простые и малогабаритные. |
||
|
На рис. 5.5 показан поперечный разрез од- |
||
|
носекционного шестеренчатого насоса. |
||
|
В корпусе 1 размещены шестерни 2 и 3, |
||
|
находящиеся в зацеплении. Одна из шестерен |
||
|
является приводной, другая - ведомой. При вра- |
||
|
щении шестерен рабочая жидкость заполняет |
||
|
всасывающую полость корпуса. Из всасывающей |
||
|
полости жидкость, заключенная во впадинах ме- |
||
|
жду зубьями шестерен, переносится в камеру на- |
||
|
гнетания и выдавливается из этих впадин зубья- |
||
|
ми сопряженной шестерни в напорную магист- |
||
|
раль. Между внутренней поверхностью корпуса |
||
|
и вершинами головок зуба шестерен между тор- |
||
|
цами шестерен и корпусом должны быть мин и- |
||
|
мальные зазоры. Число зубьев шестерни состав- |
||
Рис. 5.5. Схема односекционного |
ляет от 6 до 12. Односекционные насосы разви- |
||
вают рабочее давление до 14 МПа (140 кгс/см2), |
|||
шестеренчатого насоса |
|||
многосекционные - более 14 МПа. Производи- |
|||
|
|||
тельность (подача) шестеренных насосов рассчитывают по формуле |
|
||
|
Q = 2 π Z m2 B n η0, см3/мин, |
(5.5) |
|
где Z – число зубьев ведущей шестерни;
m– модуль зацепления шестерён, см3;
n– частота вращения ведущей шестерни, мин-1; B – ширина шестерни , см;
η0 – объёмный КПД насоса.
Шестеренные насосы просты по конструкции, малогабаритны и имеют невысокую стоимость. Основные недостатки – малый КПД (0,7 … 0,85) и небольшой срок службы при работе с высоким давлением. Их рекомендуется применять в тех гидропередачах кранов, где величина КПД не имеет существенного значения: приводы выносных опор, гидросистемы управления и т. п.
Аксиально–поршневые насосы получили наибольшее распространение в гидрообъемных приводах самоходных кранов. Они компактны, имеют высокий КПД при высоких давлениях, малоинерционны, имеют высокую удельную энергоемкость (в некоторых конструкциях до12 кВт/кг). Кинематика аксиально-поршневых гидромашин имеет два варианта. Принцип действия аксиально-поршневого насоса в варианте с блоком цилиндров, расположенных под углом к приводному валу, поясняется схемой на рис. 5.6.
101
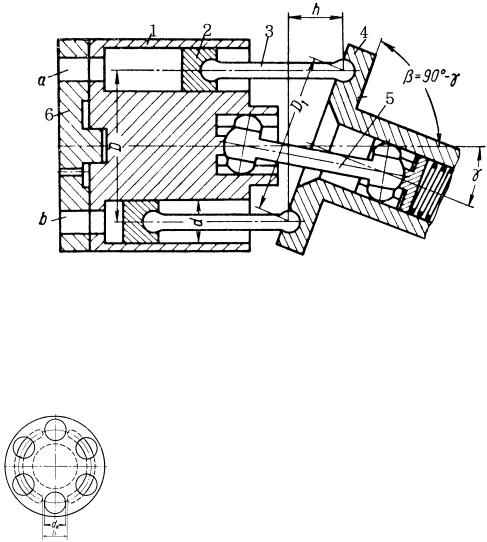
Рис. 5.6. Принципиальная схема аксиально-поршневого насоса
Насос состоит из блока цилиндров 1 с поршнями 2, которые соединены шатунами 3 с приводным блоком 4, ось вращения которого расположена под некоторым угломγ к оси вращения блока цилиндров. Передача вращения от приводного блока к блоку цилиндров осуществляется с помощью универсального карданного шарнира 5. Благодаря наклону оси блока цилиндров к оси приводного вала поршни при вращении блока совершают возвратнопоступательное движение.
За один оборот приводного вала каждый поршень совершает двойной ход (всасывание и нагнетание). Всасывание и нагнетание жидкости происходит через серповидные пазы в опорной шайбе (распределителе) (рис. 5.7). В мертвых положениях поршней впускные (выпускные) отверстия в блоке цилиндров перекрываются перемычками, разделяющими серповидные пазы. Ширина перемычки b должна быть больше отверстий dk в блоке цилиндров.
Величина хода поршня и, следовательно, объемная подача насоса зависят от угла наклона блока цилиндров γ (γ = 20°…30°). В регулируемых насосах уголγ изменяется с
помощью специальной системы управления, поддерживающей постоянную мощность, отдаваемую насосом. Теоретическую среднюю производительность насоса с небольшой погрешностью можно подсчитать по формуле
Qт = 0,785 d2 z D n tgγ, |
(5.6) |
где d - диаметр цилиндров;
z - количество цилиндров (обычно 7 ÷ 9);
D - диаметр блока цилиндров по осям поршней; n - частота вращения блока цилиндров.
На рис. 5.8 показан конструктивный чертеж нерегулируемого аксиально-поршневого насоса. Обозначения на чертеже соответствуют ранее изложенному описанию.
102
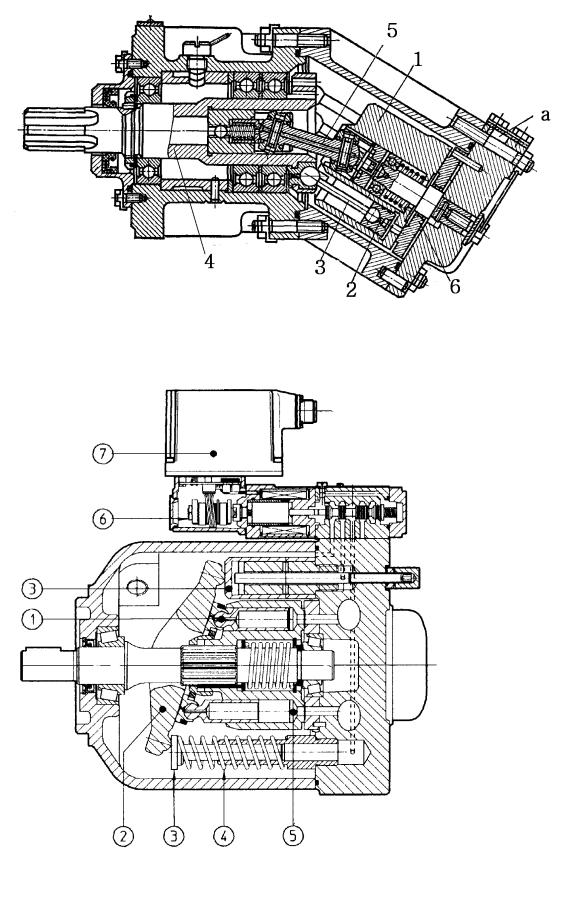
Рис. 5.8. Чертеж аксиально-поршневого нерегулируемого гидронасоса
Вариант аксиально-поршневого регулируемого насоса с наклонным диском изображен на рис. 5.9.
Рис. 5.9. Чертеж регулируемого гидронасоса
с наклонным диском
103
Втаких гидромашинах блок цилиндров вращается непосредственно приводным валом. Поршни 1 опираются на наклонный диск 2 и благодаря этому совершают возвратнопоступательное движение, всасывая и вытесняя рабочую жидкость. Рабочий объем насоса зависит от длины хода поршня. Длина хода определяется положением наклонного диска, который может наклоняться под действием двух дифференциальных сервоплунжеров 3 и пружины 4. В показанном на рис. 5.9 насосе управление подачей насоса осуществляется с помощью пропорционального распределителя 6 с встроенным блоком управлении 7. Управление рабочим объемом насоса с помощью пропорциональной системы с двойным замкнутым контуром и с датчиками обратной связи по положению опорного диска и по положению управляющего распределителя обеспечивает наилучшие рабочие характеристики и динамические свойства привода. Величина рабочего объема насоса линейно зависит от управляющего электрического сигнала.
Гидромашины с наклонным диском меньше по габаритным размерам, менее шумны и более удобны при встраивании в агрегаты, чем машины с наклонным блоком цилиндров. Они имеют меньший КПД, так как наклонный диск создает боковую составляющую, действующую на поршень, которая создает силы трения в пятнах контакта поршней и цилиндров. Рост контактных нагрузок ограничивает угол наклона диска до 15…18°.
Вгидромашинах с наклонным блоком цилиндров подшипниковые узлы значительно нагружены осевыми и радиальными силами, что приводит к увеличению размеров подшипниковых узлов и габаритов таких насосов в целом.
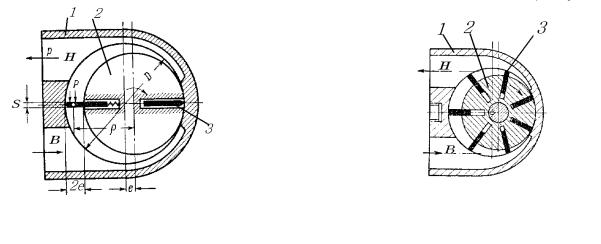
Лопастные (пластинчатые) гидронасосы представляют собой камеру (статор) 1, разде-
ленную ротором 2 с радиально подвижными пластинами 3 на секторы (рис. 5.10). Ось ротора смещена относительно оси статора на величину е так, что ротор имеет плотный контакт со статором, а подвижные пластины при любом положении ротора отделяют всасывающую полость от нагнетательной. Для уменьшения утечек в местах контакта пластин со статором пластины поджимаются к статору пружинами или специально подводимым в пазы под пластины рабочим давлением жидкости.
Рис. 5.11. Схематический чертеж
Рис. 5.10. Схематический чертеж многолопастного насоса двухлопастного насоса
При повороте ротора в направлении, указанном стрелкой, объем всасывающей камеры увеличивается, а нагнетательной уменьшается, в соответствии с чем в камере в происходит всасывание, а в камере н - нагнетание. Для уменьшения пульсации подачи жидкости в насосах ставят от 6 до 17 пластин (рис. 5.11). В насосах, имеющих 17 пластин, пульсация составляет 1,7 %. При увеличении числа пластин уменьшается также действующая на них нагрузка и увеличивается долговечность. Пластинчатые насосы применяют для создания сравнительно невысоких давлений 10…14 МПа, так как они создают большие нагрузки на ось ротора. Производительность таких насосов подсчитывают по формуле
104
Q = 2 b e n (π D – z s), |
(5.7) |
где b - ширина лопастей;
e - cмещение оси ротора относительно оси статора; D - диаметр камеры статора;
s - толщина лопастей; z - количество лопастей;
n - частота вращения ротора.
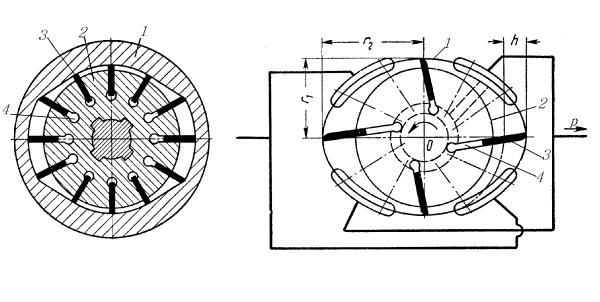
Для уменьшения радиальных нагрузок применяют нерегулируемые пластинчатые насосы двойного действия (рис.5.12). Статорная камера такого насоса имеет фасонный профиль, сопряженный радиусными кривыми. Из схемы видно, что каждая пластина за один оборот ротора нагнетает жидкость два раза. Поскольку рабочее давление жидкости действует на диаметрально противоположные стороны ротора, подшипники ротора разгружены от сил давления жидкости. При качественном исполнении лопастные насосы относительно бесшумны в работе и могут обеспечивать практически равномерную (без пульсаций) подачу рабочей жидкости.
Рис. 5.12. Схематический чертеж двухкамерного многопластинчатого насоса
Производительность двухкамерных лопастных насосов c учетом вытеснения объема жидкости лопастями можно подсчитать по формуле
Q = 2 b n [π (r12 – r22) - (r1 – r2) z s, |
(5.8) |
r1 и r2 - большая и малая полуоси статора (рис. 5.12). КПД лопастных насосов составляет η = 0,75…0,8.
5.2.3.2. Гидродвигатели. Гидродвигатели преобразуют энергию потока жидкости в механическую работу механизма. В качестве гидродвигателей в приводах механизмов используются гидромоторы и гидроцилиндры. Выходными параметрами гидромотора являются крутящий момент и частота вращения. Гидроцилиндры характеризуются толкающим усилием, величиной и скоростью перемещения подвижного звена.
Все рассмотренные ваше бесклапанные гидронасосы могут быть использованы как гидромоторы. При работе насоса в качестве гидромотора давление жидкости действует на поршни (лопасти, зубья шестерни), создавая вращательное движение этих элементов относительно оси ротора. На валу мотора возникает крутящий момент, пропорциональный величине давления, площади поршня (лопасти, боковой поверхности зуба) и радиусу вращающегося
105
элемента. В механизмах грузоподъемных машин с гидравлическим приводом вращательное движение обеспечивается радиально-поршневыми или аксиально-поршневыми гидродвигателями. Шестеренные гидромоторы в основном используют в малоответственных механизмах или как вспомогательные.
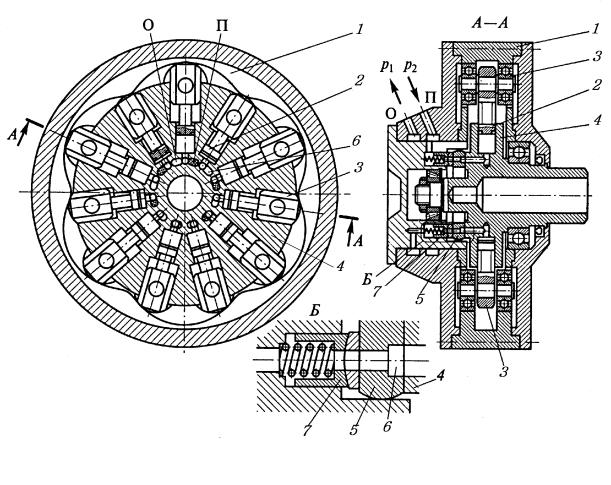
Радиально-поршневые гидромоторы применяют в передачах, где необходимо обеспечить медленное, равномерное и регулируемое по частоте вращение рабочего органа механизма. На рис. 5.13 приведен чертеж высокомоментного гидромотора шестикратного действия с одиннадцатью поршнями. Внутренняя поверхность статора 1 имеет шесть впадин. Радиусы впадин выбраны такой величины, чтобы их глубина составляла величину е, которая соответствует ходу поршня 2 с толкателам 3. Поршни с толкателями перемещаются соответственно в цилиндрах и направляющих пазах ротора 4. Подача жидкости в поршневые полости и ее сброс осуществляется через плоскую торцевую систему распределения, состоящую из торцевого распределителя 5 с дуговыми канавками 6, поджимных стаканов 7, через которые осуществляется подвод и отвод рабочей жидкости по каналам П и О соответственно.
Рис. 5.13. Чертеж высокомоментного радиально-поршневого гидромотора
Момент, создаваемый таким гидромотором, приближенно можно вычислить по формуле
М= (р1 – р2)еzkSп / π, |
(5.9) |
где р1 – давление подвода жидкости; р2 – давление отвода (слива) жидкости; е – ход поршня; z – число поршней;
k – кратность действия поршня за 1 оборот ротора; Sп – площадь поршня. Частоту вращения вала гидромотора определяют по формуле
п = Qη0/Vо , |
(5.10) |
106
где Q – расход жидкости;
η0 – объемный КПД гидромотора; Vо – рабочий объем гидромотора.
Аксиально-поршневые гидромашины среди поршневых гидромашин отличаются наибольшей компактностью при передаче равной мощности. Они отличаются также малыми инерционными моментами и способны быстро изменять частоту вращения вала.
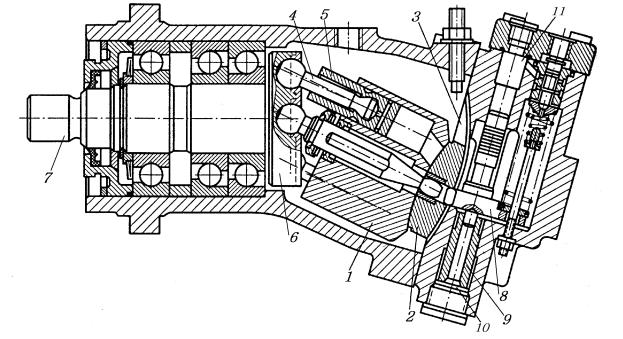
На рис. 5.14 показан чертеж аксиально-поршневого регулируемого гидромотора.
Рис. 5.14. Чертеж регулируемого аксиально-поршневого гидромотора
Эта машина отличается от ранее описанной (рис. 5.8) тем, что блок цилиндров 1 опирается на сферический распределитель 2, который может перемещаться по цилиндрическому пазу 3 в крышке корпуса гидромотора. Через распределитель рабочая жидкость подается поочередно в поршневые полости блока цилиндров 1. Штоки 4 поршней 5, взаимодействуя с наклонной поверхностью 6 выходного вала 7, создают крутящий момент, который также заставляет поворачиваться блок цилиндров, обеспечивая подачу жидкости в очередную поршневую полость. При перемещении распределителя 2 по цилиндрическому пазу уменьшается угол наклона оси блока цилиндров к оси выходного вала, уменьшается рабочий объем насоса и возрастает частота вращения вала 7 при неизменном расходе жидкости на входе насоса. Минимальный угол отклонения блока цилиндров 7°, максимальный - 25°. Перестановка распределителя 2 осуществляется толкателем 8 под действием поршня 9 гидроцилиндра 10, присоединенного к линии управления. При уменьшении момента сопротивления на валу гидродвигателя снижается давление в полости 11, присоединенной к линии высокого давления гидропередачи, что автоматически приводит к перемещению распределителя 2 и возрастанию скорости вращения вала мотора. Таким образом, регулируемый гидромотор позволяет наилучшим образом использовать мощность двигателя при изменяющемся моментенагрузки.
Гидродвигателями для линейного перемещения элементов машин служат гидроцилинд-
ры. В приводах строительных машин применяют гидроцилиндры одностороннего и двухсто-
107
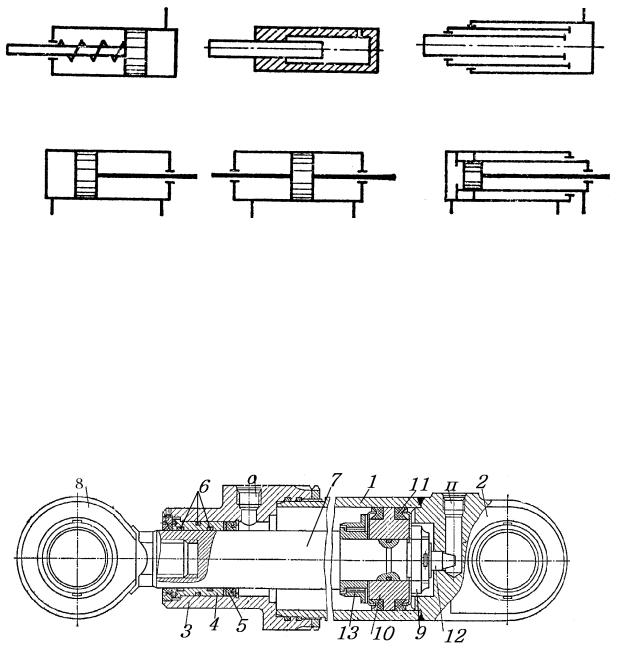
роннего действия. Последние бывают одноштоковыми и двухштоковыми. На рис. 5.15 приведены схематические чертежи таких гидроцилиндров.
а |
б |
в |
г |
д |
е |
Рис. 5.15. Схемы гидроцилиндров одностороннего (а, б, в) и двустороннего (г, д, е) действия
В гидроцилиндрах одностороннего действия поршень со штоком движется под давлением рабочей жидкости только в одном направлении. Обратное движение осуществляется под действием внешних сил (пружин, нагрузи на приводимом рабочем органе). В гидроцилиндрах двустороннего действия поршень со штоком перемещается в обоих направлениях под действием рабочей жидкости.
Конструктивное исполнение гидроцилиндра, применяемого для изменения угла наклона стрелы грузоподъемного крана, показано на рис. 5.16.
Рис. 5.16. Чертеж гидроцилиндра наклона стрелы автомобильного крана
Этот гидроцилиндр двустороннего действия. Он состоит из цилиндрической гильзы 1 и приваренной к ней проушины 2 с каналом П для подвода в поршневую полость рабочей жидкости. На другой конец гильзы навинчена крышка 3 с каналом О. В крышке установлена направляющая втулка 4 с манжетой 5 и уплотнительными кольцами 6. Внутри гильзы перемещается шток 7. К внешнему концу штока привинчена проушина 8, а на внутреннем его конце закреплен гайкой 9 поршень 10 с уплотнительными манжетами 11. Для уменьшения скорости движения поршня со штоком в конце хода и предотвращения ударов поршня на штоке установлены демпферы дроссельного типа 12 и 13.
108

Усилия и скорости, развиваемые на штоке гидроцилиндра двустороннего действия при постоянном давлении р и расходе Q в гидросистеме, будут различаться при выдвижении и втягивании штока.
При выдвижении штоком создается толкающее усилие
Fш = 0,785 Dп2 p ηм , |
(5.11) |
скорость штока будет |
|
Vш = Q ηо / 0,785 Dп2. |
(5.12) |
При втягивании штока создается тянущее усилие |
|
Fт = 0,785( Dп2- dш2 ) p ηм |
(5.13) |
со скоростью перемещения штока |
|
Vт =Q ηо / 0,785 (Dп2 – dш2). |
(5.14) |
В этих формулах: Dп – диаметр поршня; dш - диаметр штока; ηм и ηо - соответсвенно механический и объемный КПД гидропривода.
Конструкции других гидроцилиндров, применяемых в грузоподъемных кранах, показаны на рис. 5.17 и 5.18. Гидроцилиндр по рис. 5.17 используют для выдвижения секций телескопической стрелы крана.
Ход поршня 2 в цилиндре 1 может достигать 6 м и более. Шток 3 выполнен из трубы, внутри которой проходит трубопровод 4 для подачи гидрожидкости из канала 5 в поршневую полость. В штоковую полость гидрожидкость подается через канал 6. Проушиной 7 шток крепится к неподвижной секции 1 стрелы с помощью сферического подшипника скольжения 8. В этой конструкции шток 3 остается неподвижным, а перемещается корпус гидроцилиндра 1, к которому с помощью цапф 9 крепятся элементы выдвижных секций стрелы.
Рис. 5.17. Гидроцилиндр для выдвижения секций телескопической стрелы крана
109
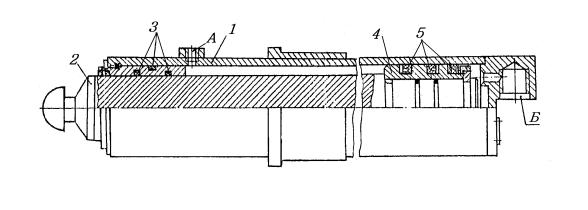
Гидроцилиндр на рис. 5.18 используется для установки крана на выносные опоры.
Рис. 5.18. Гидроцилиндр вывешивания крана на выносных опорах
В корпусе гидроцилиндра 1 перемещается шток 2, который одновременно выполняет функцию опоры крана, воспринимающей осевые и боковые нагрузки. Площадь поперечного сечения штока должна быть достаточной для их восприятия, а наружный конец штока должен иметь сферическое окончание для центрирования нагрузки на шток в случае уклона опорной поверхности. Крышка гидроцилиндра с уплотнениями 3 и поршень 4 с уплотнениями 5 должны иметь достаточную длину для того, чтобы обеспечивать невысокие удельные давления на шток и корпус гидроцилиндра при боковых опорных нагрузках.
5.2.3.3. Аппараты управления гидроприводом. Аппараты управления гидроприводом предназначены для регулированиянаправления, давленияи расхода потока рабочей жидкости.
Гидрораспределители служат для регулирования направления потока жидкости. В грузоподъемных кранах наибольшее распространение получили гидрораспределители золотникового типа.
Основными параметрами гидрораспределителей, как и другой направляющей гидроаппаратуры, являются номинальный расход Qном и номинальное давление Рном. Под номинальным давлением понимают такое наибольшее давление, при котором гидравлическое оборудование сохраняет свои технические характеристики в течение времени, на которое оно рассчитано. В гидрообъемных передачах самоходных кранов обычно Рном составляет 10 …25 МПа.
Управляющим элементом золотниковых распределителей является перемещающийся в осевом направлении в расточке корпуса цилиндрический плунжер (золотник), имеющий несколько кольцевых проточек и осевых дросселирующих каналов. Золотники таких гидрораспределителей уравновешены от действия статического давления жидкости в радиальном и осевом направлениях. Сами распределители технологичны в производстве, компактны и допускают пропорциональное регулирование расхода рабочей жидкости.
Перемещение золотников может производиться вручную с помощью рычагов и тяг или гидравлическими, пневматическими и электромагнитными устройствами, позволяющими автоматизировать систему управления краном. В зависимости от числа присоединений внешних гидролиний гидрораспределители бывают двух-, трех- и четырехлинейными. По числу фиксированных или характерных позиций золотника относительно корпуса распределители разделяют на двух-, трех-, четырехпозиционные.
На гидравлических схемах распределитель обозначают разделенным на несколько частей прямоугольником. Число частей прямоугольника соответствует числу позиций золотника. Для каждой позиции золотника в соответствующей части прямоугольника стрелками изображают направление потоков жидкости. Закрытый ход изображают тупиковой линией с поперечным отрезком. Линии подвода и отвода жидкости к золотнику всегда подводят к той части прямоугольника, которая соответствует нейтральной позиции золотника. Направление движения рабочего органа механизма в какой-либо позиции золотника (рис. 5.19) определя-
110