

Уравнение равновесия плоской сходящейся систем сил
Сумма
проекций всех сил на ось
и
![]() равны нулю, т.е.
равны нулю, т.е.
![]() ,
,![]() .
.
Задача
3. Однородный
шар весом
(рис. 25) удерживается на гладкой наклонной
плоскости тросом. Определить натяжение
троса
![]() и давление шара на плоскость
и давление шара на плоскость
![]() .
.
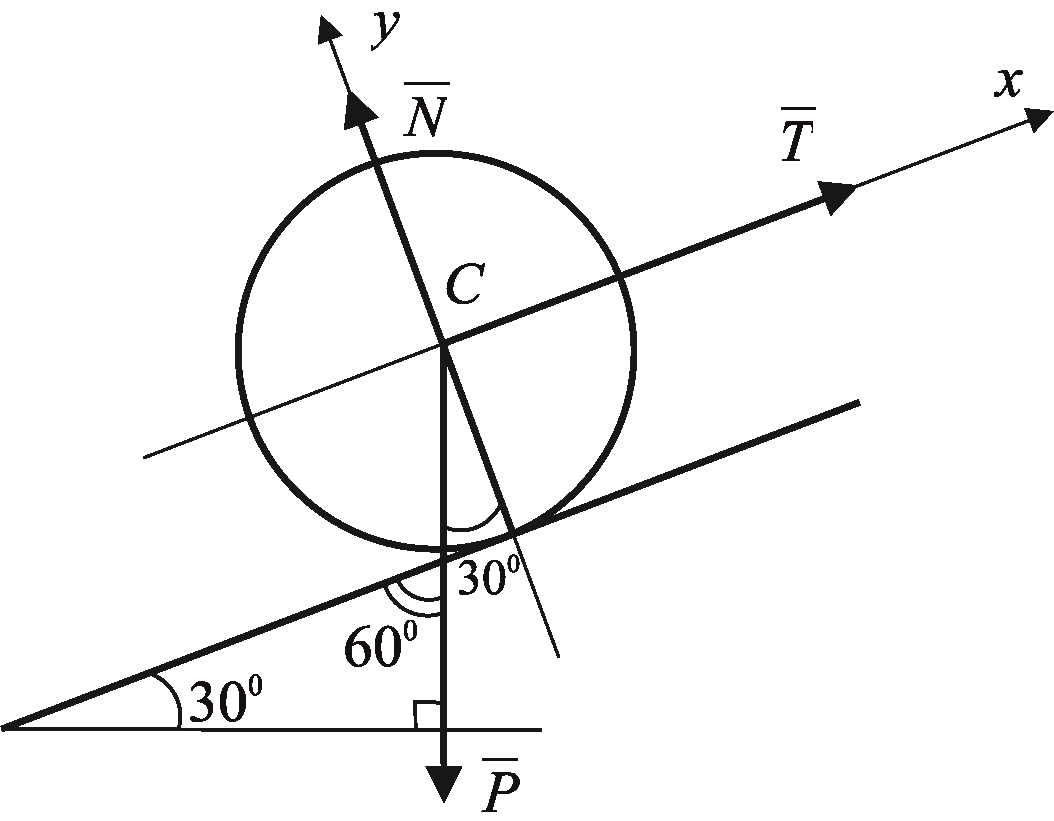
Решение.
Так как ось
можно выбрать как угодно, то ось
направим по
![]() ,
а ось
по
,
а ось
по
![]() .
.
![]() ;
;
![]() ;
;
![]() ;
;
;
![]() ;
;
![]() .
.
Рис. 25
Алгебраические моменты силы относительно точки
Алгебраический
момент силы
![]() относительно центра О равен взятому с
соответствующим знаком произведению
модуля силы на ее плечо (плечо силы это
кратчайшее расстояние от линии действия
силы до данного центра), т. е.
относительно центра О равен взятому с
соответствующим знаком произведению
модуля силы на ее плечо (плечо силы это
кратчайшее расстояние от линии действия
силы до данного центра), т. е.
![]()
При этом в правой системе координат, принятой в механике, момент считается положительным, когда сила стремится повернуть тело вокруг центра О против хода часовой стрелки, и отрицательным — когда по ходу часовой стрелки.
Теорема Вариньона о моменте равнодействующей
Если данная система сил имеет равнодействующую, то момент равнодействующей относительно любого центра О равен сумме моментов сил системы относительно того же центра.
Т.е.
если система сил
![]() ,
,
![]() ,
…
,
…
![]() приводится к равнодействующей
приводится к равнодействующей
![]() ,
то
,
то
![]() .
.
Алгебраические моменты пары сил
Алгебраический момент пары равен взятому с соответствующим знаком произведению модуля одной из сил пары на плечо пары (плечо пары это расстояние между линиями действия сил пары):
![]() .
.
Правило знаков здесь такое же, как для момента силы.
Уравнения равновесия плоской системы сил
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из двух координатных осей и сумма их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю.
,
,
![]() .
.
Точка любая, как правило, это точка пересечения двух неизвестных реакций.
Задача
4. Жесткая
рама
![]() (рис. 26) имеет в точке
неподвижную шарнирную опору, а в точке
- подвижную шарнирную опору на катках.
Все действующие нагрузки и размеры
показаны на рисунке.
(рис. 26) имеет в точке
неподвижную шарнирную опору, а в точке
- подвижную шарнирную опору на катках.
Все действующие нагрузки и размеры
показаны на рисунке.
Дано:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Определить реакции связей в точках , , вызываемые действующими нагрузками.
Решение.
Рассмотрим
равновесие рамы. Проведём координатные
оси
![]() и изобразим действующие на раму силовые
факторы: силу
и изобразим действующие на раму силовые
факторы: силу
![]() ,
пару сил с моментом
,
пару сил с моментом
![]() ,
натяжение троса
(
,
натяжение троса
(![]() )
и реакции связей
)
и реакции связей
![]() ,
,
![]() ,
,
![]() (реакцию неподвижной шарнирной опоры
изображаем двумя её составляющими,
реакция шарнирной опоры на катках
направлена перпендикулярно опорной
плоскости).
(реакцию неподвижной шарнирной опоры
изображаем двумя её составляющими,
реакция шарнирной опоры на катках
направлена перпендикулярно опорной
плоскости).
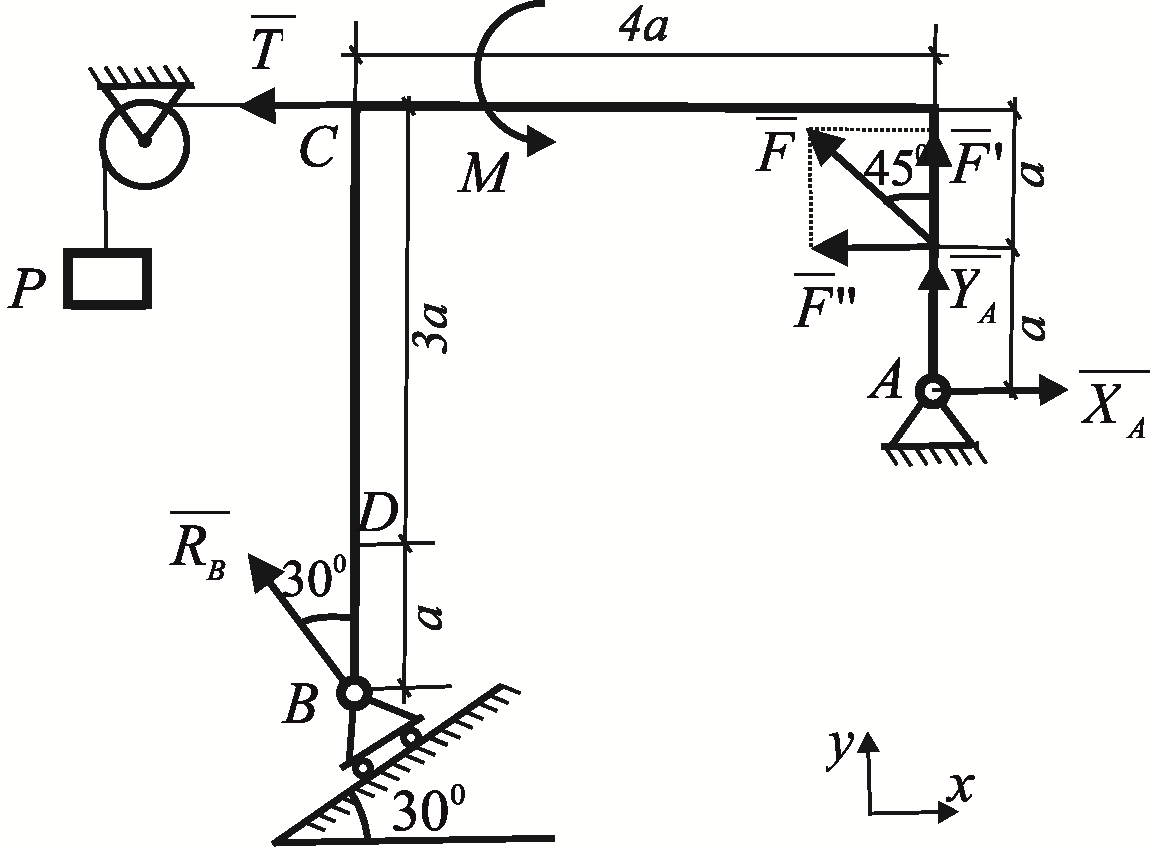
Рис. 26
Для
равновесия данной плоской системы сил
необходимо и достаточно выполнения
трёх уравнений: суммы проекций всех
сил на координатные оси
и
,
а также сумма их моментов относительно
любого центра равны нулю. В третьем
уравнении при вычислении момента силы
относительно точки
воспользуемся теоремой Вариньона, т.е.
разложим силу
на составляющие
![]() и
и
![]() (
(![]() ,
,
![]() )
и учтём, что
)
и учтём, что
![]() .
.
Получим:
![]() :
:
![]() ;
;
![]() :
:
![]() ;
;
![]() :
:
![]() ;
;
Подставив
в составленные уравнения числовые
значения заданных величин, и решив эти
уравнения, определим искомые реакции:
![]() ,
,
![]() ,
,
![]() .
.
Для проверки правильности ответа составляем уравнение моментов сил относительно той точки, для которой в полученном уравнении присутствовали бы ранее искомые реакции.
![]() :
:
![]() ;
;
![]() .
.
Полученный результат показывает правильность ответа.