

Основные понятия статики
Сила – количественная мера механического взаимодействия тел.
Сила – величина векторная и, как всякий вектор, характеризуется тремя параметрами: модулем (численная величина), точкой приложения и направлением.
Направление
на рисунке определяется стрелкой. Силу
обозначают черточкой над буквой (![]() ),
а модуль силы буквой без черточки (
),
а модуль силы буквой без черточки (![]() ).
В системе единиц СИ сила измеряется в
Ньютонах
(
).
В системе единиц СИ сила измеряется в
Ньютонах
(![]() ).
).
Особое место занимает линия действия силы, так как силу можно переносить вдоль линии, но так чтобы сила не покинула тело (в случае системы тел).
Эквивалентные системы сил – это силы, которые оказывают одинаковые действие на твердое тело.
Свободное твердое тело – это тело, к которому не приложены силы и которому под действием силы можно сообщить любое перемещение в пространстве.
Если система сил эквивалентна нулю, то такая система сил называется уравновешенной.
Если система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил.
Аксиомы статики
1) Аксиома инерции: Под действием взаимно уравновешивающихся сил материальная точка (тело) находится в состоянии покоя или движется прямолинейно и равномерно.
2) Аксиома равновесия двух сил: Две силы, приложенные к абсолютно твердому телу, будут уравновешены тогда и только тогда, когда они равны по модулю, действуют по одной прямой и направлены в противоположные стороны.
3) Аксиома присоединения и исключения уравновешивающихся сил: Действие системы сил на абсолютное твердое тело не изменится, если к ней прибавить или отнять уравновешенную систему сил.
Следствие: Действие силы на абсолютное твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия. Т.е. сила, приложенная к абсолютному твердому телу – скользящий вектор.
4) Аксиома параллелограммы сил: Равнодействующая двух пересекающихся сил приложена в точке их пересечения и изображается диагональю параллелограммы, построенной на этих силах.
5) Аксиома равенства действия и противодействия: Всякому действию соответствует равное и противоположно направленное противодействие.
6) Принцип отвердевания: Равновесие сил, приложенных к деформирующемуся телу, сохраняется при его затвердевании (условия равновесия являются здесь необходимыми, но недостаточными).
Основные типы связей и их условные обозначения
Связями называются другие тела, ограничивающие перемещение данного тела в пространстве.
Реакцией связи называется сила или совокупность сил, с которыми связь действует на тело. Реакция связи всегда направлена в сторону, противоположную той, куда связь не дает переместиться телу.
Приведем примеры основных типов связей, встречающихся при решении задач произвольной плоской системы сил.
1. Гладкая поверхность
Реакция направлена по общей нормали к поверхности (рис. 1). Если одна из поверхностей вырождается в точку, то реакция направлена по нормали к другой поверхности (рис. 2).

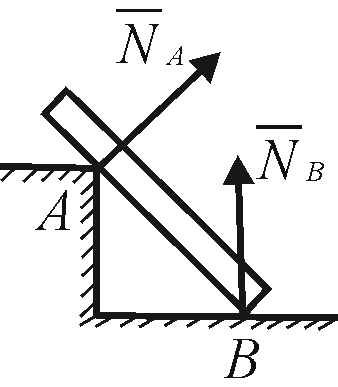
Рис. 1 Рис. 2
2. Цилиндрический шарнир с неподвижным основанием (неподвижный шарнир)
Реакция
![]() лежит в плоскости, перпендикулярной
оси шарнира, проходит через нее, и
направление ее неизвестно (рис. 3,4). Чтобы
не определить это направление в плоскости,
реакцию
раскладывают на две составляющие:
лежит в плоскости, перпендикулярной
оси шарнира, проходит через нее, и
направление ее неизвестно (рис. 3,4). Чтобы
не определить это направление в плоскости,
реакцию
раскладывают на две составляющие:
![]() .
.
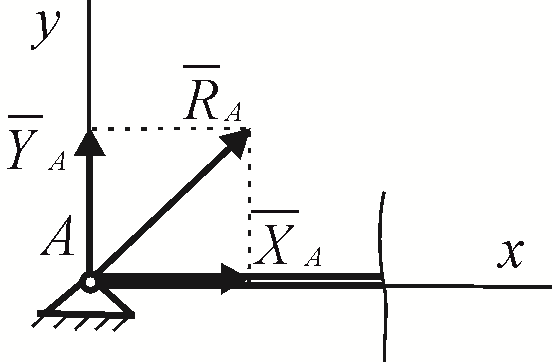
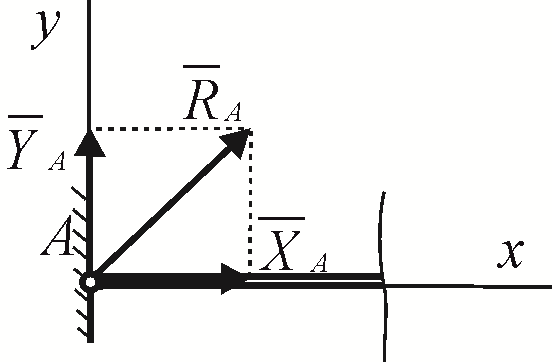
Рис. 3 Рис. 4
3. Цилиндрический шарнир с подвижным основанием (подвижный шарнир)
Реакция проходит через ось шарнира и направлена перпендикулярно поверхности, по которой возможно перемещение шарнира (рис. 5).

Рис. 5
4. Гибкая нерастяжимая нить (веревка, трос, цепь, канат)
Реакция направлена по нити в сторону точки подвеса (от тела, равновесия которого рассматривается) (Рис. 6).
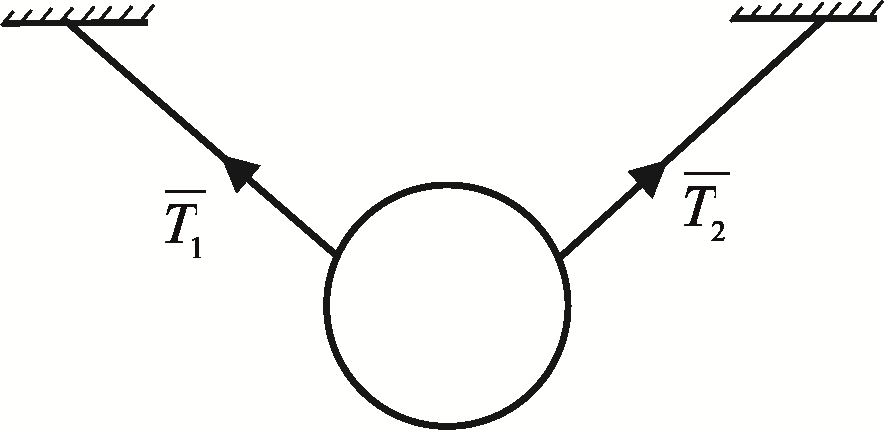
Рис. 6
5. Стержень
Реакция невесомого стержня, направлена вдоль стержня (рис. 7).
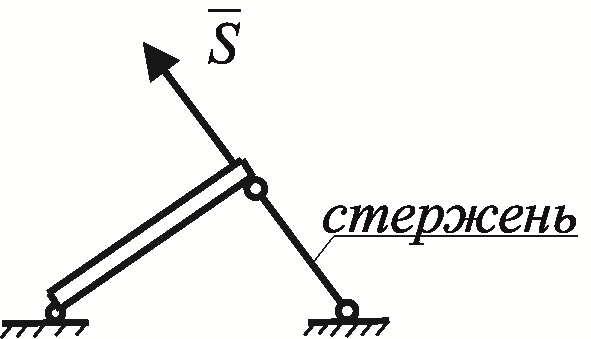
Рис. 7
6. Жесткая заделка (или жесткое защемление)
Возникает произвольно направленная реакция и момент (рис. 8). Реакцию, как и в случае цилиндрического шарнира, раскладывают на две составляющие.
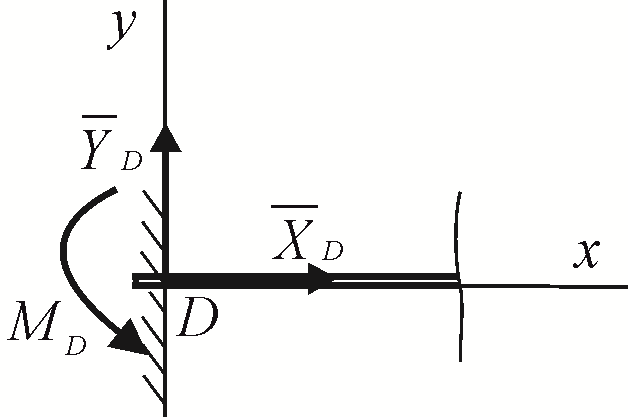
Рис. 8