

Учебное пособие 1942
.pdfУравнения движения рассматриваемого ТМ имеют вид (1.15), при этом с учетом (4.15), (4.20) и (4.26) получим
А 1 x 1= n1 h |
1 [U1 km 1 /R1 - (km 1 ke 1 n1 /R1 h |
1 ) х 1 ], |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
2 |
x 2 = n2 h2 [U2 km 2 /R2 |
- (km 2 ke 2 n2 |
/R2 h2 ) х 2 ], |
|
|
|||||||||||||||||
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
~ |
|
2 |
=n3 h3 [U3 km 3 /R3 -(km 3 ke 3 n3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
А 3 |
x |
3 +C3 h3 |
/ R3 h3 ) х 3 ], |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
~ |
2 |
|
|
|
2 |
|
~ |
|
2 |
|
|
|
2 |
~ |
|
|
2 |
|
|
|
2 |
|
|
|
|
|
где |
+ J |
, |
|
+ J |
|
|
+ J |
. |
||||||||||||||||
|
|
|
А 1=A1 h1 |
1 n1 |
А 2 =A2 h2 |
2 n2 |
, А 3 |
=A3 h3 |
3 n3 |
||||||||||||||||||
|
|
Введем следующие обозначения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
~ |
|
|
|
|
2 |
/R1 ) |
|
, |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
В 1( х 1) = (km 1 ke 1 n1 |
х 1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
2 |
/R2 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В 2 ( |
х 2 ) = (km 2 ke 2 n2 |
х 2 , |
|
|
||||||||||||
|
|
|
|
~ |
|
|
|
|
|
|
2 |
/R3 ) |
|
|
|
|
2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
В 3 ( |
х 3 )=(km 3 ke 3 n3 |
х 3 +C3 h3 |
|
|
|
|
|
|
|
|
|||||||||||||
(4.63)
(4.64)
С учетом принятых обозначений управляемый процесс описывается следующей системой уравнений:
~ |
|
~ |
|
|
|
|
|
|
А 1 x 1 |
+ В |
1( х 1) = (n1 h1 km 1 /R1)U1 , |
|
|
||||
|
|
|
~ |
|
~ |
|
/R2 )U2 , |
(4.65) |
~ |
|
|
А 2 |
x 2 |
+ В |
2 ( х 2 ) = (n2 h2 km 2 |
||
|
~ |
|
|
|
|
|
|
|
А 3 |
x 3 |
+ В |
3 ( х 3 ) = (n3 h3 km 3 /R3 )U3 . |
|
|
|||
131
Задачу синтеза алгоритма позиционного управления сформулируем следующим образом. Синтезируемый алгоритм управления ТМ должен обеспечивать перевод механизма из на-
чального состояния
x1(0), х 1(0), |
x2(0), х 2(0), |
x3(0), х 3(0) |
(4.66) |
|
|
|
|
в назначенное состояние, которое соответствует неподвижной точке (xзад1, xзад2, xзад3)т. Необходимо при этом, чтобы переходные процессы
xj (t ) xзад j (t), j = 1, 2, 3 являлись решениями уравнений |
|
||||
х j э (t)+ |
j 1 |
х j (t)+ |
j 0 хj (t ) = |
j 0 хзад j , |
(4.67) |
|
|
|
|
|
|
Решение поставленной задачи достигается с помощью алгоритмов управления по ускоре-
нию
U j = j (aj - х j ). |
(4.68) |
Требуемые ускорения вычисляются из (4.67) по формуле
aj = х j э = |
j 0 |
(хзад j - xj) - j 1 |
х j. |
(4.69) |
|
|
|
|
|
Уравнения (4.68) можно записать в интегральной форме |
|
|
|
|
t |
|
j ( aj dt - х j ). |
(4.70) |
|
Uj (t ) = |
||||
0 |
|
|
|
|
|
|
|
|
|
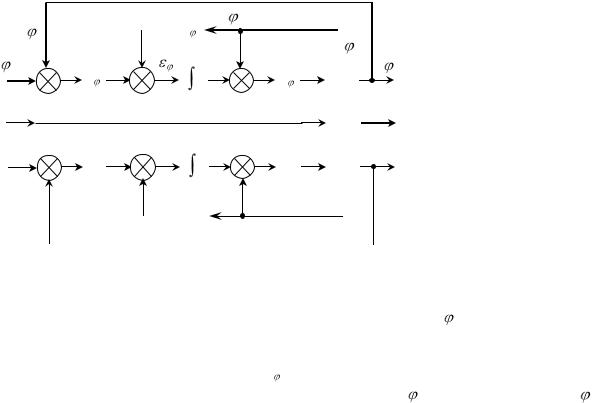
Структурная схема одного из каналов системы управления ТМ, соответствующая (4.69) и
132
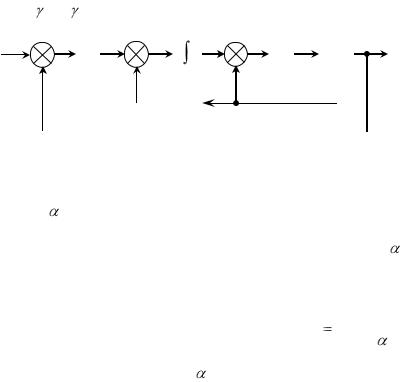
(4.70), приведена на рис.4.7. Два других канала СУ ТМ имеют идентичную структуру. Коэффи-
циенты j 0 и |
j 1 определяются из уравнения (4.28) при j=1, 2, 3. |
||||||||||||||||||||||
xзадj |
|
|
|
|
aj |
|
|
|
|
|
|
Uj |
|
|
|
|
xj |
||||||
|
|
|
|
γjo |
|
|
|
|
|
|
|
|
|
|
αj |
|
|
|
ИМ |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xj |
|
|
|
|
|
|
|
|
x j |
|
x j |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
γj1 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Рис. 4.7. Структурная схема канала СУ ТМ, |
|
|
|
|
|
|
|
работающего в декартовой системе |
|||||||||||||||
координат Система независимых уравнений (4.65) с учетом (4.68), (4.69) при неограниченном воз-
растании j преобразуется в три уравнения, совпадающие с соответствующими уравнениями (4.67). Требуемая степень приближения управляемых процессов к эталонным может быть достигнута при конечных значениях коэффициентов усиления j .
Постоянные времени контуров ускорения вычисляются в соответствии с (4.60) по форму-
лам:
|
|
|
|
~ |
|
|
|
Та j |
|
|
Rj |
Аj |
, j = 1, 2,..., n. |
(4.71) |
|
n j km j |
( |
j j hj + ke j n j ) |
|||||
|
|
|
|||||
Коэффициенты усиления j определяются из уравнения
133
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Та j |
|
|
Rj Аj |
|
|
(0,1 |
|
|
0,2)Т j . |
|
(4.72) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
n j km j ( j hj + ke j n j ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из (4.72) следует расчетная формула для определения коэффициентов усиления контуров |
||||||||||||||||||||||||||||||||||||
ускорения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
ke j n j |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5 |
|
10) |
|
Rj Аj |
|
|
. |
|
|
|
|
(4.73) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
Т j n j km j hj |
|
hj |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
4.6. Позиционное управление манипулятором |
|
|
|
|
|
|
|
|
|
|
|
в цилиндрической системе |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
координат |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Уравнения |
динамики рассматриваемого |
ТМ |
|
получены в |
разделе 1.3 в |
виде |
(1.29). |
|||||||||||||||||||||||||||||
С учетом (4.18), (4.24) запишем их следующим образом: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
~ |
|
B (r, r, |
) = n1 [U1 km 1 /R1 |
- (km 1 ke 1 n1 /R1 ) ], |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
A (r) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
C l h |
2 |
|
|
|
|
|
|
/R2 |
|
|
|
|
|
|
|
|
|
|
|
|
(4.74) |
|||||||||
|
|
|
|
|
A l l |
|
2 =n2 h2 [U2 km 2 |
- (km 2 ke 2 n2 /R2 h2 ) l ], |
||||||||||||||||||||||||||||
|
|
|
|
|
~ |
|
)h |
2 |
=n3 h3 |
[U3 km 3 /R3 |
-(km 3 ke 3 n3 /R |
|
|
]. |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
Ar r Br (r, |
|
|
3 |
3 h3 ) r |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
~ |
|
|
|
|
|
|
|
|
2 |
|
~ |
|
|
|
2 |
|
|
|
2 |
~ |
|
|
|
2 |
|
|
|
|
2 |
|
||
|
|
|
|
A (r) |
J 1n |
, |
|
A |
h |
J |
|
A h |
|
J |
|
|||||||||||||||||||||
|
|
|
|
|
где A (r) |
1 |
A |
l |
2 |
2n2 |
, A |
3 |
|
3n3 . |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
r |
|
r |
|
|
|
|
|
|
|||||
134
~ |
Приведем систему (4.74) к виду |
|
|
||||||||||
|
|
B (r, r, |
) +(km 1 ke 1 n1 |
2 |
/R1 ) |
= (n1 km 1 /R1)U |
1 , |
||||||
A (r) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
~ |
|
|
2 |
|
|
|
2 |
|
|
= (n2 h2 km 2 /R2 )U2 , |
|
||
A l l C l h 2 |
+ (km 2 ke 2 n2 |
/R2 ) l |
|
||||||||||
~ |
|
|
(r, |
|
)h |
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Ar r Br |
|
3 +(km 3 ke 3 n3 |
/R3 ) r = (n3 h 3 km 3 /R3 )U3 . |
||||||||||
Введем следующие обозначения:
~
B (r, r, )
~
B~l (l) C l h
Br (r, r, )
B (r, r, ) (k |
|
k n 2 |
/R ) , |
|||||||
|
|
|
|
m1 |
e1 |
1 |
1 |
|
||
22 (km2ke2n 22 /R2 ) l , |
|
|
|
|
|
|||||
B (r, )h 2 |
(k |
m3 |
k |
e3 |
n 2 |
/R |
3 |
)r . |
||
r |
3 |
|
|
3 |
|
|
||||
(4.75)
(4.76)
С учетом принятых обозначений (4.76) уравнения (4.75) запишутся в виде:
A (r) |
|
B (r, r, |
) = n1 U1 km 1 /R1, |
||||
~ |
|
~ |
|
|
|
|
|
~ |
|
~ |
|
|
|
|
(4.77) |
A l l |
+ Bl |
(l) = n2 h2 U2 km 2 /R2 , |
|||||
~ |
|
~ |
|
|
) = n3 h3 U3 km 3 |
/R3 . |
|
Ar r |
+ Br |
(r, r, |
|
||||
Система уравнений (4.77) учитывает как динамику ТМ, работающего в цилиндрической системе координат, так и уравнения движения исполнительных двигателей постоянного тока.
135
Задача синтеза алгоритма позиционного управления рассматриваемым ТМ формулируется следующим образом.
В начальный момент времени t = 0 состояние управляемого ИМ характеризуется некоторыми значениями координат и скоростей их изменения
(0), (0), l(0), l (0), r(0), r (0). |
(4.78) |
Требуется синтезировать такие алгоритмы вычисления управляющих напряжений Uj, при которых ИМ переходит из начального состояния (4.78) в окрестность заданной точки с коорди-
натами |
зад, lзад, rзад и продолжает оставаться в этой окрестности бесконечно долго. Необходимо |
|||||||
при этом, чтобы процессы (t) |
зад, |
l (t) |
l зад, r(t ) |
rзад являлись решениями дифференци- |
||||
альных уравнений: |
|
|
|
|
|
|
|
|
|
|
|
э (t)+ |
1 (t)+ |
0 (t ) = |
0 |
зад, |
|
|
|
|
l э (t)+ |
l 1 l (t)+ l 0 l (t) = l 0 lзад, |
(4.79) |
|||
|
|
|
r |
э (t)+ |
r 1 r (t )+ |
r 0 r (t) = |
r 0 rзад, |
|
|
|
|
|
|
|
|
|
|
|
где э (t ), |
l |
э (t), r э (t)- эталонные ускорения по координатам; |
|||||
|
|
|
|
|
|
|
|
|
1, |
0, l1, l0, r1, r0 - параметры алгоритма управления. |
|
|
|||||
Выполнение равенств (4.79) достигается в том случае, когда в процессе движения ускорения управляемых координат равны
136
( , ) = |
э = 0 ( зад - |
||
al (l, l ) = l э = |
l 0 (lзад - l)- |
||
ar (r, r ) = |
r |
э = |
r 0 (rзад - r) - |
|
|
|
|
) - |
1 , |
l 1 l , |
(4.80) |
|
|
r 1 r . |
|
Фактические ускорения , l , r отличаются от соответствующих
эталонных э , l э , r э . Чтобы синтезировать алгоритмы управления по
ускорению, управляющие напряжения следует получать с помощью следящих контуров, интегрируя выражения
|
= |
( |
- ), |
|
= |
|
|
|
= |
|
U 1 |
U 2 |
l (al - l ), |
|
U 3 |
r (a r - r ), (4.81) |
|||||
, l , |
r = const > 0. |
|
|
|
|
|
|
|
||
В результате интегрирования получаем уравнения |
||||||||||
|
|
|
t |
|
|
|
|
t |
al dt - l (t)], |
|
U1(t) = |
[ |
dt - (t)], |
U2(t) = |
l [ |
||||||
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
t |
|
|
|
(4.82) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U3(t) = |
r [0 |
ar dt - |
|
(t)]. |
|
|
|
|
|
|
r |
|
|
|||||
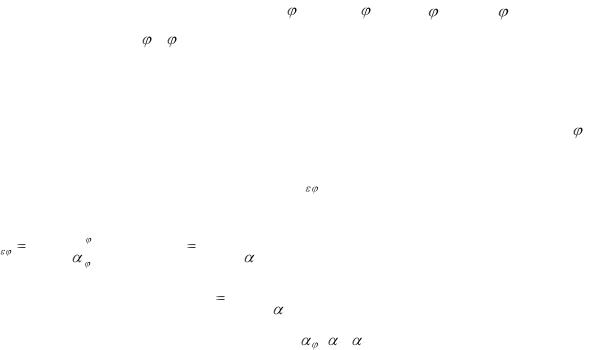
На основе уравнений (4.80) и (4.82) получена структурная схема, представленная на рис. 4.8.
137
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ 1 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
зад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
γ o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
lзад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U2 |
5. |
|
|
l |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
||
rзад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ar |
|
|
|
|
|
|
|
|
|
|
|
U3 |
|
|
r |
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
γro |
|
|
|
|
|
|
|
|
αr |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γr1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
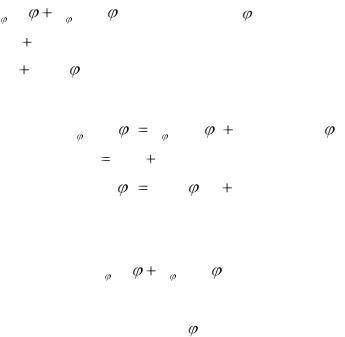
Рис. 4.8. Структурная схема СУ ТМ, работающим |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в цилиндрической системе координат |
||||||||||||||||
На схеме детально представлены два канала по координатам и r. Система содержит три внутренних контура отработки ускорений. В структуру этих контуров входит исполнительный механизм ИМ, каждая степень подвижности которого является составной частью соответствующего контура. Требуемые ускорения  , al и ar формируются внешними контурами по ин-
, al и ar формируются внешними контурами по ин-
формации о состоянии управляемого процесса (координаты , l, r и их производные , l , r ).
138
Если линейные координаты l и r и их производные l и r недоступны физическому измерению, они могут быть вычислены по соотношениям:
l = 2 h2 , r = 3 h3 |
, l = 2 h2 , |
r |
= 3 h3 , |
(4.83) |
|
|
|
|
|
где 2, 3 — углы поворота валов редукторов в степенях подвижности; h2 , h3 — длины плеч в механизмах преобразования вращательного движения в поступа-
тельное.
При этом для аппаратурной реализации системы управления требуются обычные датчики углов и угловых скоростей.
При бесконечно больших коэффициентах усиления в контурах ускорения координат |
, l, r |
система взаимосвязанных уравнений (4.77) преобразуется в три независимых уравнения, |
кото- |
рые совпадают с соответствующими уравнениями эталонной системы (4.79).
В соответствии с (4.60) постоянные времени T |
, Ta l , Ta r контуров ускорения определяют- |
|||||||||
ся по формулам |
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
~ |
|
|
|
Т |
R |
1 А (r) |
, |
Та l |
|
|
R 2 А l |
|
, |
|
n 1km1 |
( + ke1n 1) |
n 2km 2 |
( l h 2+ ke2n |
2) |
|
|||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
~ |
(4.84) |
||
|
|
|
|
Т |
|
|
R 3 А r |
|
|
. |
|
|
|
|
а r |
|
|
|
|||
|
|
|
|
|
|
n 3 km3 ( r h 3+ ke3n 3) |
||||
Числовые значения коэффициентов усиления |
, l , r определим из уравнений |
|||||||||
139
max T = (0,1 0,2)T , |
= , l, r. |
(4.85) |
, l , r |
|
|
Из выражений (4.84) и (4.85) получим формулы для расчета коэффициентов усиления контуров ускорения:
|
|
|
|
|
~ |
|
|
|
|
(5 |
10) |
|
R |
1 А (rmax ) |
|||
|
|
|
n 1km1Т |
|||||
|
|
|
|
|
||||
|
|
|
|
|
~ |
|
|
|
|
(5 |
10) |
|
|
R 2 А l |
|
||
l |
n 2km2 h 2Т l |
|||||||
|
|
|||||||
|
|
|
||||||
|
|
|
|
|
~ |
|
|
|
|
(5 |
10) |
|
|
R 3 А r |
|
||
r |
|
n 3 km3h 3Т r |
||||||
|
|
|
||||||
|
|
|
|
|||||
ke1n 1 ,
ke 2n 2 |
, |
(4.86) |
||
h |
2 |
|||
|
|
|||
ke3n 3 , h 3
4.7. Позиционное управление манипулятором |
в сферической системе |
координат |
|
Уравнения динамики расматриваемого ТМ получим на основе выражения (1.49) с учетом
(4.18), (4.24) в следующем виде:
140