

Учебное пособие 1942
.pdf6. МИКРОПРОЦЕССОРНАЯ РЕАЛИЗАЦИЯ АЛГОРИТМОВ УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ
6.1. Варианты построения систем управления |
манипуляторами |
На практике могут быть использованы три способа аппаратной реализации алгоритмов управления промышленными роботами: аналоговый, микропроцессорный и гибридный. На исполнительном уровне широко применяются гибридный и аналоговый способы; при этом контуры тока и скорости обычно реализуются на аналоговой технике, а контур положения - как на аналоговой, так и на микропроцессорной основе. По двухконтурной схеме (включающей контуры скорости и тока) выполнено большинство существующих регулируемых электроприводов для промышленных роботов и технологического оборудования /10, 26/, которые могут быть использованы при создании новых систем управления манипуляторами. Вопросы проектирования таких приводов при выполнении регулятора скорости в аналоговом и цифровом виде рассмотрены в работах /7, 11/. На исполнительном уровне применяется также и непосредственное цифровое управление /16, 32/.
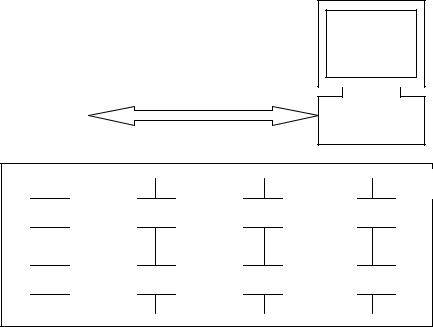
В том случае, если используются серийные электроприводы с аналоговым сигналом задания скорости, система управления может быть построена в соответствии с функциональной схемой, показанной на рис. 6.1.
На рис. 6.1 приняты следующие обозначения блоков:
191
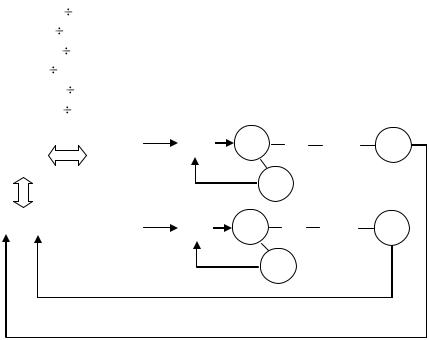
МСД — модуль связи с датчиками; МАВыв — модуль аналогового вывода;
ИП1 ИП n — исполнительные приводы координат робота;
|
М1 Мn — исполнительные двигатели робота; |
|
||||||||||||||||
|
ДС1 ДСn — датчики скорости двигателей; |
|
||||||||||||||||
|
Р1 Рn — редукторы; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ИМ1 |
ИМ n — исполнительные механизмы координат робота; |
||||||||||||||||
|
ДП1 ДП n — датчики перемещений координат. |
|
||||||||||||||||
|
|
|
|
|
Uзс1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
микро- |
|
|
|
9. |
М1 |
P1 |
|
|
ИМ1 |
|
ДП1 |
|||||||
|
|
|
|
|
|
|
||||||||||||
|
ЭВМ |
|
|
|
. |
|
|
|
|
|
||||||||
|
|
|
МАВыв |
|
|
|
|
|
|
|
|
. |
|
|
|
|
||
|
|
|
|
. |
|
10. |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
. |
|
|
|
|
||||||
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uзсn |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
8. М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДПn |
|
|
|
|
|
ИПn |
Мn |
Pn |
|
ИМn |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. . . |
ДСn |
. . . |
|
||
|
|
|
|
. |
|
|
. |
|
|
. |
|
Рис. 6.1. Функциональная схема цифро-аналоговой
192
системы управления
МикроЭВМ через модуль связи с датчиками МСД получает информацию о положении координат и на основе сравнения заданных и фактических перемещений вырабатывает коды задающих воздействий.
МАВыв преобразует коды в аналоговые сигналы Uзс1 Uзсn, которые поступают на регуляторы скорости исполнительных приводов ИП1 ИП n . Приводы обеспечивают отработку заданных скоростей.
На рис. 6.2 показана функциональная схема исполнительной системы, в которой формирование напряжений на якорях двигателей происходит на основе цифровой техники.
В состав функциональной схемы входят следующие блоки: МПП — модуль процессора приводов; ГИ — групповой интерфейс; МАВ — модуль аналогового ввода;
МСД — модуль связи с датчиками;
ПКДИ1 ПКДИ n — преобразователи кода в длительность импульса; ИУМ1 ИУМ n — импульсные усилители мощности;
М1 М n — исполнительные двигатели.
12. |
ПКДИ1 14. |
M1 |
|
193УМ |
|
13. |
МСД |
с ДП1 |
|
с R1

Рис. 6.2. Функциональная схема цифровой системы управления
МПП на основе информации о требуемых перемещениях координат манипулятора, поступающей с тактического уровня управления, и текущем положении координат, получаемой через ГИ и МСД, вырабатывает коды задания управляющих напряжений. Если ДП1 ДП n представ-
194
ляют собой датчики относительных перемещений (например, импульсные датчики), возникает также необходимость в применении датчиков абсолютного отсчета. Их роль выполняют потенциометрические датчики R1 R n , сигналы с которых через МАВ и ГИ вводятся в МПП.
Преобразователи ПКДИ1 ПКДИ n формируют широтно-импульсные сигналы, длительность которых определяется соответствующими кодами задания, поступающими с МПП. После усиления в ИУМ1 ИУМn управляющие напряжения поступают на якори исполнительных двигателей М1 М n .
При отработке заданных траекторий движения на МПП с тактического уровня поступают не только коды требуемых перемещений, но и коды заданных скоростей координат. Информация о фактических скоростях снимается с соответствующих датчиков или получается в результате численного дифференцирования перемещений координат.
Втом случае, если один МПП не успевает в реальном времени (с частотой широтноимпульсного сигнала) сформировать коды задания управляющих напряжений для всех координат манипулятора, на исполнительном уровне управления используется мультипроцессорная схема, т.е. МПП имеется в составе каждой координаты робота.
Вкачестве МПП могут быть использованы 8-разрядные однокристальные микроЭВМ серий К1816, К1830, К1835. Применение 16-разрядных микроконтроллеров INTEL MCS-196/296, имеющих собственные генераторы широтно-импульсных сигналов и аналого-цифровые преобразователи, позволяет исключить дополнительные ПКДИ и МАВ.
Реализация алгоритмов тактического уровня и алгоритмов адаптивного управления требует применения современных ЭВМ. Конец второго тысячелетия ознаменовался стремительным развитием аппаратных и программных средств вычислительной техники. Они легко реализуют
195
требуемые законы управления, быстро перепрограммируются и позволяют создавать сложные информационные и управляющие системы.
В зависимости от конкретных технических требований к проектируемому роботу его система управления может иметь один, два, три или четыре уровня управления. В интеллектуальных роботах присутствуют высший, стратегический, тактический и исполнительный уровни управления. В адаптивных роботах отсутствует высший уровень; в программно-управляемых роботах присутствуют только тактический и исполнительный уровни. Необходимо отметить, что двухуровневая схема является наиболее распространенной в промышленности.
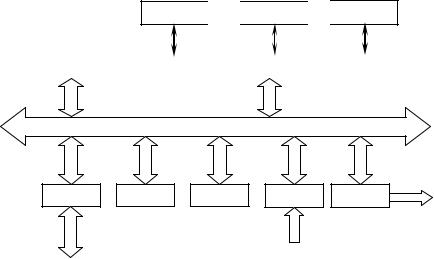
Функциональная схема тактического уровня современных систем управления роботов (см. рис. 6.3) соответствует традиционной структуре построения ЭВМ.
15. Н
 16. В
16. В
 17. П
17. П
19. |
|
18. И |
Магистраль МА1
20. |
21. |
22. |
23. |
24. |
на М
и ТО
196
На исполнительный с М и ТО уровень управления
Рис. 6.3. Функциональная схема тактического уровня управления
В состав схемы входят:
модуль центрального процессора (МЦП), обеспечивающий управление остальными блоками через магистраль МА1;
интерфейс (И) для подключения к магистрали МА1 накопителя информации (НИ), видеотерминального устройства (ВТУ), пульта ручного управления (ПРУ);
постоянное и оперативное запоминающие устройства (ПЗУ и ОЗУ); модули дискретного ввода и вывода (МДВв и МДВыв);
модуль связи магистрали МА1 с исполнительным уровнем управления (МС).
В зависимости от сложности реализуемых алгоритмов в качестве МЦП могут использоваться микропроцессоры 80286, 80386, 80486 или Pentium. Соответственно изменяются тип магистрали МА1 и объем памяти ОЗУ. Для решения обратной задачи кинематики, интерполяции задающих сигналов между опорными точками и фиксации полученных результатов на тактическом уровне управления достаточно использовать процессор 80286, шину ISA и ОЗУ со стандартным объемом памяти 1 Мбайт. Реализация сложных адаптивных алгоритмов управления в реальном времени требует применения более мощных процессоров и высокопроизводительных
197

шин типа PCI, VESA или даже создания мультипроцессорной структуры.
Необходимо отметить, что микропроцессорная техника дает необходимую универсальность и гибкость в реализации практически любых законов управления (не только адаптивных), наглядно отражает результаты расчетов и позволяет хранить их в файлах данных. Но микропроцессорная реализация имеет и существенный недостаток: ограниченную способность обмена данными в рамках мультипроцессорной структуры типа «общая шина». В том случае, если это ограничение приводит к существенному снижению производительности системы, целесообразно применение транспьютеров — микропроцессоров, специально спроектированных как блоки для построения параллельных систем /4/.
Транспьютеры позволяют системным проектировщикам создавать сети процессоров, удовлетворяющие требованиям по производительности. Транспьютерная сеть представляет собой набор транспьютеров, каждый из которых является процессором с локальной памятью и связан с другими процессорами линиями связи транспьютера, которые могут быть фиксированными или переключаемыми. Кроме того, топологию сети можно изменять с помощью схем коммутации линий связи, настраиваемых на уровне программного обеспечения до запуска программы в сети.
Транспьютерная сеть технически реализуется в виде комплекта модулей, имеющих средства стыковки с другими ЭВМ через стандартные системные интерфейсы.
На рис. 6.4 показан один из возможных вариантов конфигурации транспьютерных средств. В состав структуры входят персональный компьютер типа IBM PC и мультикластер типа МС-3 с сетью транспьютеров Т0 Т7, соединенный с IBM посредством транспьютерного
198
адаптера ВВК-РС.
BBK- |
Шина IBM PC |
|
PC |
|
|
|
|
|
|
|
|
25. IB
 26.
26.  27.
27. 
 28.
28. 
 29.
29. 
 30.
30.  31.
31. 
 32.
32. 
 33.
33. 
Рис. 6.4. Транспьютерный комплекс
199
IBM отрабатывает программу, выполняющую следующие функции:
1)диалог с пользователем;
2)загрузка исполняемого кода в транспьютеры и запуск транспьютерной части программного обеспечения;
3)отображение на экране дисплея в графической форме траектории движения робота;
4)сохранение данных на жестком диске.
Транспьютеры работают по программе, решающей задачи:
1)программная генерация траектории робота;
2)решение прямой и обратной задач кинематики;
3)численное решение систем дифференциальных уравнений, описывающих динамику ро-
бота;
4) реализация адаптивных алгоритмов управления приводами.
Применение транспьютеров позволяет получить практически линейный рост производительности в зависимости от числа транспьютеров, участвующих в вычислительном процессе.
Микропроцессорная реализация алгоритмов любого уровня управления связана с выбором ЭВМ, задачей которой является выполнение необходимых расчетов в реальном времени при движении манипулятора. Способность конкретной управляющей ЭВМ решать эту задачу определяется вычислительной сложностью алгоритма управления и временем выполнения отдельных операций.
6.2. Вычислительная сложность алгоритмов управления
200