

Учебное пособие 1878
.pdf2.3.Определение реакций
вкинематических парах групп Ассура
Сцелью проведения силового расчета механизм расчленяется на группы Ассура. Расчет начинается с той группы, в состав которой входит выходное звено. Затем последовательно рассчитываются все группы, и заканчивается силовой анализ расчетом входного звена механизма.
Определение реакций в кинематических парах групп с помощью метода кинетостатики рекомендуется проводить в следующем порядке.
1. Изобразить группу Ассура в заданном положении, вычертив ее в соответствующем масштабе.
2. Приложить к звеньям группы все заданные силы и неизвестные реакции в кинематических парах.
3. Приложить к звеньям группы силы инерции и моменты сил инерции.
4. Согласно принципу отвердевания и принципу Даламбера составить уравнение равновесия для группы в целом, как для твердого тела. Записывая уравнение равновесия для группы, следует придерживаться определенного порядка: вначале записать все силы, действующие на одно звено, затем, действующие на другое звено. Запись уравнения следует начинать и заканчивать неизвестными реакциями. Для большей ясности в уравнение следует включать и внутренние реакции. Сложение векторов сил проводитсяв тойжепоследовательности, чтои запись уравнения.
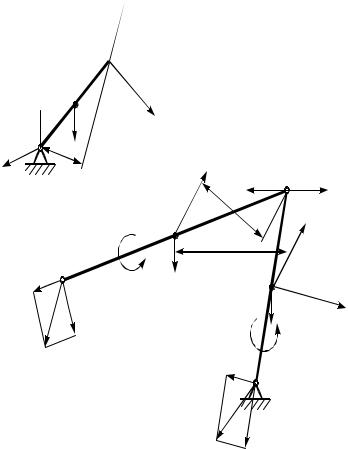
Проследим этот порядок на примере группы с тремя вращательными парами, входящей в состав шарнирного четырехзвенника. Составим уравнение равновесия группы:
R12 |
G2 Pu2 |
R32 R23 |
G3 Pu3 Puc |
|
R03 0; |
|||||||||||
|
|
|||||||||||||||
|
известнаясторона треугольника |
|
|
|||||||||||||
|
|
|
|
|
n |
|
|
; |
|
|
|
|
n |
|
. |
|
|
R |
R |
R |
R |
R |
R |
||||||||||
|
12 |
12 |
12 |
03 |
03 |
|
03 |
|||||||||
По этому уравнению построить план сил не удастся, т.к. если построение плана свести к построению треугольника, пред-
41

ставив все известные силы как одну сторону треугольника, то увидим, что две другие стороны включают силы, величины и направления которыхне известны. Такой треугольник построить невозможно. В этом случае надо использовать уравнение равновесия моментов сил, разложив одну из реакций на два направления, пустив одну из составляющих реакции через ту точку, относительно которой будет составляться уравнение моментов. Составим уравнение моментов относительно точки B для звена 2. Выбирая точкуВ в качестве центра, мы исключаем тем самым из уравнения моментов нормальную составляющую R12n реакций
R12 в шарнире А и реакцию R32 в шарнире В. Итак,
MB R12 AB Mu2 Pu2h2 G2 2 0 .
Разрешая это уравнение относительно R12 , получим ее величину. Направление реакции определяется ее знаком. Затем реакцию R03 на две составляющие и составляя уравнение моментов относительно точки В для звена 3, находимR03 .
Рассматривая уравнение равновесия после того, как силы R12 и R03 отправлены в категорию известных сил, видим,
что треугольник, у которого одна сторона известна по величине и направлению, а две другие (R12n и R03n ) известны по на-
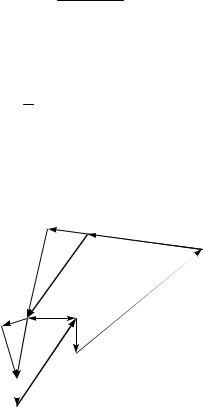
правлению, построить можно. Поэтому приступаем к построению плана сил (рис. 2.16). Далее определяем реакции во внутренней паре. Для этого составляем уравнение равновесия для какого-либо одного звена (составление уравнения заключается в простом переписывании части уже составленного уравнения для группы). Напишем уравнение для звена 2, освобождая его от связей в точке В:
R12 + G2+ Pu2+ R32 = 0.
Для определения R32 используем уже построенный для группы план сил:
R23 = – R32 .
42
2.3.1. Силовой расчет начального звена
Расчет начального звена ведем в следующем порядке: освобождаясь от связей, заменяем их действие силами реакций связи. В точке А прикладываем реакцию R23 = – R32, найденную ранее при силовом расчете группы. В точке 0 прикладываем искомую реакцию R01. В точке S1 прикладываем силы Pu и G1.
R21 
_
A Pu1
Pu1
aS1_ 
 G1
G1
O1 |
h |
_ |
|
R01 |
|
Mu2
_n |
A |
|
R12 |
_ |
|
_ |
|
|
R21 |
||
R12 |
|
|
|
_ |
|
|
|
|
|
|
|
|
|
а |
Py |
|
|
|
_ |
|
|
|
_ |
|
_ |
|
|
|
|
B |
|
||||
|
|
|
|
|
R |
|
R |
|
||
|
P |
u2 |
h |
|
32 |
|
|
|
_ |
23 |
|
|
|
|
|
||||||
|
S2 |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
l2 |
|
|
|
|
|
Pu |
||
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
_ |
|
|
|
S3 |
|
|
|
_ |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
_ |
|
Pп.с. |
||||
|
G2 |
|
|
|
||||||
|
|
|
_ |
|
|
G3 |
|
|
||
|
|
|
|
|
M |
|
|
|
||
|
|
|
R |
|
|
u2 |
|
|
||
|
|
|
03 |
C |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
_ |
|
|
_n |
|
|
|
|
|
б |
|
R03 |
|
|
R03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Рис. 2.15 |
|
|
|
|
|
|
|
|
|
43
В точке А прикладываем силу Py, направление которой известно. Сила Py – это сила, передающаяся на начальное звено со стороны отброшенной части механизма, а также это сила, представляющая действие на начальное звено со стороны двигателя и отброшенных вместе с ним звеньев. Это сила называется уравновешивающей и определяется исходя из заданного закона движения начального звена.
Py R21h G1a .
Если =const, то M0 = 0 = Py – R21h + G1а.
Если же звено вращается с угловым ускорением , то
M0=J0 .
После определения Py строится план сил, из которого определяется реакция R01 . Конструкция привода может быть
такой, что на начальное звено внешний силовой фактор передается не в виде силы, а в виде момента сил. Расположение линии действия Py желательно выбирать так, чтобы реакцияR01 была бы по возможности наименьшей.
_
|
R03 |
Pп.с. |
|
|
_ |
|
_ |
|
_ |
R03n |
R03 |
|
||
_ |
_ |
_ |
|
Pu3 |
R12n |
R23= -R32 |
|
|
|
_ |
_ |
|
|
|
R12 |
|
|
|
|
R12 |
_ |
|
|
|
_ |
_ |
G3 |
|
|
Pu2 |
|
|
|
|
G2 |
|
|
|
|
|
Рис. 2.16 |
|
|
|
Рассмотрим порядок |
расчета еще |
одной группы |
||
(рис. 2.17).
44
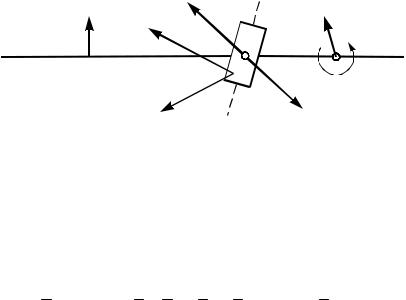
_ |
_ |
R32 |
P |
R03 |
R |
|
3 |
|
|
||
|
12 |
D |
M3 |
|
|
||
|
_ |
|
_ |
|
|
R23 |
|
|
P2 |
|
Рис. 2.17
Группа с одной внутренней вращательной парой. Здесь все известные силы, действующие на звенья 2 и 3, представлены в виде эквивалентных систем сил (в виде главных векторов сил и главных моментов). Будем считать, что силы и моменты сил инерции также включены в число известных сил. Составляя уравнение равновесия для группы, будем иметь:
R12 |
P2 R32 R23 P3 |
R03 0. |
|
|
|
известная сторона треугольника
Отсюда видим, что на известной стороне треугольника надо построить две другие стороны, направления которых известны. Такой треугольник строится, и поэтому решение задачи следует начать с построения плана сил для группы в целом, а затем, записав уравнение равновесия для какого-либо звена, найти внутреннюю реакцию R23 или R32, затем найти точки приложения реакций R03 и R12 из уравнений моментов относительно точки D.
Таким образом, составляя уравнение равновесия для группы в целом и анализируя его, можно найти кратчайший путь решения задачи не только для групп 2-го класса, но и для групп 3-го класса.
Вот пример (рис. 2.18), когда решение задачи следует начать с построения плана сил для звена 3.
45

3
 2
2
Рис. 2.18
Вот другой пример (рис. 2.19), когда решение следует на-
чать с определения R03 , затем построить план сил для звена 3.
_ |
2 |
R32 |
|
_ |
_ |
R23 |
|
R12 |
3 |
|
_
R03
_
R03
_
R03n
Рис. 2.19
Если силовой расчет механизма необходимо провести с учетом трения в кинематических парах, тогда расчет без учета трения является только первым приближением, по результатам которого определяются нормальные давления в парах, а затем – приближенные значения сил трения на основании известных законов трения.
46
3.ОБЩИЕ СВЕДЕНИЯ
ОПРОЕКТИРОВАНИИ МАШИН
3.1.Стадии проектирования
Проектированием называется процесс разработки комплексной технической документации, содержащей техникоэкономические обоснования, расчеты, чертежи, макеты, сметы, пояснительные записки и другие материалы, необходимые для производства машины. По типу изображения объекта раз-
личают чертежное и объемное проектирование, последнее включает выполнение макета или модели объекта. Для деталей машин характерен чертежный метод проектирования.
Совокупность конструкторских документов, полученных в результате проектирования, называется проектом.
Правила проектирования и оформления проектов стандартизованы в Единой системе конструкторской документации (ЕСКД), которая устанавливает пять стадий разработки конструкторской документации на изделия всех отраслей промышленности, а именно:
техническое задание устанавливает основное назначение и технические характеристики, показатели качества и техни- ко-экономические требования, предъявляемые к разрабатываемому изделию;
техническое предложение – совокупность конструкторских документов, содержащих технические и техникоэкономические обоснования целесообразности разработки документации изделия на основании анализа технического задания, сравнительной оценки возможных решений с учетом особенностей разрабатываемого и существующих подобных изделий, а также патентных материалов;
эскизный проект – совокупность конструкторских документов, содержащих принципиальные конструктивные решения, дающие общие представления об устройстве и принципе работы изделия, а также данные, определяющие его основные параметры и габаритные размеры;
47
технический проект – совокупность конструкторских документов, содержащих окончательные технические решения, дающие полное представление об устройстве изделия и исходные данные для разработки рабочей конструкторской документации;
разработка технической документации включает чер-
тежи узлов и деталей, спецификации, технические условия на изготовление, сборку, испытание изделия и др.
3.2. Основные термины и определения
Изделие — это любой предмет (или набор предметов), подлежащий изготовлению на предприятии. Один и тот же предмет может быть изделием, сборочной единицей и деталью.
Деталь – изделие, изготовленное из однородного материала без применения сборочных операций. Например, винт, гайка, вал, шкив, литой корпус и т.д.
Сборочная единица – изделие, составные части которого соединены посредством сборочных операций (свинчивание, сварка, пайка, сшивка, вальцевание и т.п.). Например, ручка, подшипник, стол, сварной корпус, станок, автомобиль и т.д.
Комплект – два или более изделий, не соединенные сборочными операциями и предназначенные для выполнения вспомогательных функций. Например, комплект запасных частей, измерительного инструмента, записывающей аппаратуры и т.д.
Комплекс – два или более изделия, не соединяемые сборочными операциями, но предназначенные для выполнения взаимосвязанных функций. Например, поточная линия станков, телефонная станция, несобранная бурильная установка.
Чертежи деталей и сборочных единиц обязательно имеют технические требования на изготовление. Чертежи сборочных единиц дополнительно снабжаются технической характеристикой и подетальной спецификацией (отдельный текстовый документ).
Машина — устройство, совершающее механические движения с целью преобразования энергии, материалов и информации, например двигатель внутреннего сгорания, прокатный стан, арифмометр.
48
4.ПЕРЕДАЧИ. ОБЩИЕ ВОПРОСЫ
4.1.Назначение и классификация передач
Механическими передачами называются механизмы, передающие энергию от двигателя к рабочим органам машины. При этом, как правило, происходит преобразование скоростей, сил и моментов, а иногда характера и закона движения.
Применение в машинах передач обусловлено следующими причинами: требуемые скорости рабочих органов машины отличаются от скоростей стандартных двигателей; двигатели, как правило, имеют равномерное вращение ведущего звена, а в машинах требуется возвратно-поступательное движение или движение по заданному закону; необходимостью регулирования скорости рабочего органа машины.
Всовременном машиностроении наряду с механическими передачами широко применяются электрические, гидравлические, пневматические и комбинированные передачи.
Вкурсе «Детали машин и основы конструирования» рассматриваются лишь механические передачи для равномерного вращательного движения.
4.2. Классификация передач
Механические передачи вращения различаются:
По принципу действия:
–фрикционные – действующие за счет сил трения, создаваемых между элементами передач;
–зацеплением (давлением)– работающие в результате
возникновения давления между зубьями, кулачками или другими специальными выступами на деталях.
Фрикционные и зубчатые передачи могут быть выполнены как с непосредственным контактом ведущего и ведомого звеньев, так и посредством гибкой связи – ремня, цепи.
По характеру изменения скорости:
–понижающие (редукторы);
–повышающие (мультипликаторы).
49
По взаимному расположению валов в пространстве:
–с параллельными валами;
–с пересекающими валами;
–с перекрещивающимися валами.
По характеру движения валов:
–простые;
–планетарные.
По числу отдельных передач:
–одноступенчатые;
–многоступенчатые.
По конструктивному оформлению:
–открытые (не имеют общего корпуса);
–полузакрытые, смонтированные в легкий защитный кожух, который не выполняет силовых функций;
–закрытые, заключенные в общий прочный и жесткий корпус, объединяющий все подшипниковые узлы и выполняющий силовые функции.
4.3.Основные кинематические характеристики передач
При равномерном вращательном движении тела его любая точка имеет постоянную угловую скорость
const , t
где φ – угол поворота; t – время поворота.
Скорость вращения характеризуется также частотой вращения n (об/мин)
φ = 2πn → ω = 2 n 2 n n , рад/c. t 60 30
Линейная скорость V точки определяется зависимостью:
V R D м/с,
2
где D и R – диаметр и радиус вращения данной точки. Линейную скорость V называют окружной скоростью. Сила Ft, действующая на тело и вызывающая его враще-
ние или сопротивление вращению, называется окружной силой.
50