

Учебное пособие 1878
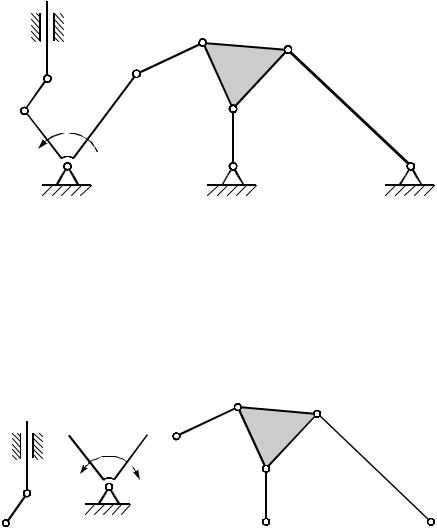
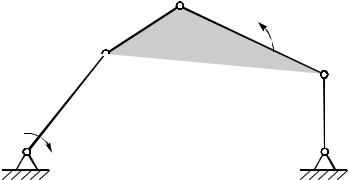
.pdfКласс группы определяется классом замкнутого контура. Класс контура определяется числом его сторон или числом кинематических пар в контуре. Порядок – число свободных пар контура. Представленная на рис. 1.20 первая группа будет III класса 3 порядка, а вторая IV класса 2 порядка.
Если в механизме есть группа III класса (не выше), то такой механизм будет механизмом III класса. Если ввести группу IV класса, то механизм будет IV класса.
1 |
|
4 |
2 |
3 |
|
||
|
1 |
4 |
|
|
|
||
|
2 |
|
3 |
|
|
|
|
|
|
Рис. 1.20 |
|
Класс механизма определяется наивысшим классом группы, входящей в данный механизм. Рассмотренный механизм (рис. 1.20) состоит из двух групп второго класса, присоединенных к начальному звену и к стойке, значит, класс механизма второй. Начальное (ведущее) звено со стойкой есть механизм I класса. При структурном синтезе последовательно присоединяются структурные группы определенного класса к механизму I класса (начальному) и к стойке.
Для чего необходимо знать класс механизма? В зависи-
мости от класса механизма выбираются методы кинематического и силового исследования механизма.
Имея структурную схему механизма, всегда возможно определить класс механизма. Для этого из структурной схемы механизма необходимо выделить структурные группы определенного класса, выполняя нужную последовательность.
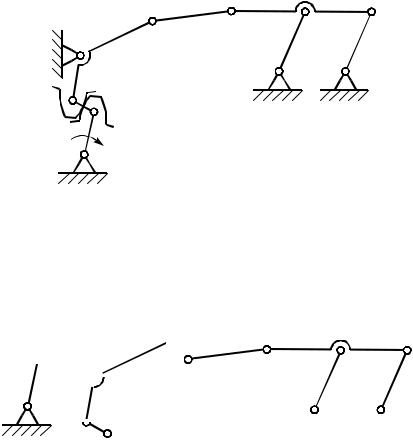
Рассмотрим определение класса механизма на примере
(рис. 1.21).
1. Отсоединим от механизма самую простую по классу группу Асcура, наиболее удаленную от ведущего звена, с тем
21
условием, чтобы оставшаяся цепь была механизмом и сохранила заданную степень свободы, т.е. W=1.
2. Отсоединив одну группу, определим ее класс и переходим к следующей.
7 |
|
|
|
N |
|
C |
D |
B |
|
3 |
|
2 |
|
||
6 M |
|
|
5 |
K |
|
E |
|
|
|
||
1 |
|
4 |
J |
А |
|
F |
|
|
|
|
|
0 |
|
0 |
0 |
W=3n–2Р5–Р4; n=7; Р5=10; W=1.
Рис. 1.21
В данном механизме можно выделить две группы (рис. 1.22): одна из звеньев 6 и 7 – II класса 2 порядка; вторая из звеньев 2, 3, 4 и 5 – III класса 3 порядка. Весь механизм будет III класса. Формула строения механизма представлена на рис. 1.22.
II(6,7) I (1,0) III(2,3,4,5) |
|
||
7 |
2 |
3 |
|
1 |
|||
|
5 |
||
|
|
||
6 |
|
4 |
|
|
|
||
|
Рис. 1.22 |
|
|
22
В этом же механизме изменим ведущее звено, выберем ведущим звено ЕF и определим снова класс механизма. Он изменится на второй, значит, класс механизма зависит от выбора ведущего звена.
Рассмотрим механизм, в состав которого входит высшая кинематическая пара. Пару составляют звено 1 и 2 (рис. 1.23).
C 4 |
D 5 |
E |
3 |
6 |
7 |
B |
|
2 |
F |
J |
|
|
||
О1 |
|
|
|
|
О2 |
|
|
|
|
|
|
|
1 А |
|
|
Рис. 1.23
Прежде чем определить класс механизма, необходимо произвести замену высшей пары. Строим заменяющий механизм и определяем его класс (рис. 1.24). В механизм входят две группы: второго и третьего класса.
I (1,0) ——— II(2,3) — III(4,5,6,7)
3 |
4 |
5 |


 6 7 1
6 7 1 
 2
2
Рис. 1.24
Следовательно, исходный (заданный) механизм также третьего класса. Классификация по Ассуру-Артоболевскому дана только для плоских механизмов.
23
1.9. Структурные группы пространственных механизмов
Принцип образования механизмов является общим для плоских и пространственных. Условие существования пространственных структурных групп то же, т.е. W=0.
Степень свободы определяется выражением
W=6n-5Р5–4Р4–3Р3–2Р2–Р1.
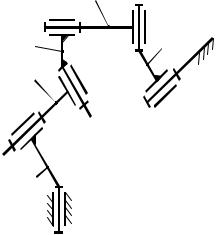
Пусть пространственный механизм состоит из звеньев, соединенных парами только 5-го класса (рис. 1.25). Структурная формула для него имеет вид W=6n-5Р5. Условие существования групп: Wгр. = 0, т.е. 6n=5Р5. Структурная группа будет выглядеть так: n = 5; 5Р5=6n; W=0.
|
4 |
3 |
5 |
|
|
2 |
|
1
Рис. 1.25
Структурная группа получается громоздкой. Выберем другой состав звеньев и пар в механизме (рис. 1.26).
W=6n–5Р5–4Р4–3Р3
24
 2 1
2 1 
Рис. 1.26
Условие существования группы: Wгр. = 0
6n=5Р5+4Р4+3Р3
В этом случае n=2; Р5=1; Р4=1; Р3=1
Если такую группу присоединим к начальному звену, движение которого определяет одна обобщенная координата, получим пространственный механизм со степенью свободы, равной единице (рис. 1.27)
 2 3
2 3 
 1
1
n=3;Р5=2; Р4=1; Р3=1; W=6 3–5 2–4 1–3 1=1.
Рис. 1.27
Следовательно, принцип образования пространственных механизмов сохраняется.
25
2.АНАЛИЗ МЕХАНИЗМОВ
2.1.Кинематический анализ механизмов
Кинематический анализ механизмов – это изучение движения звеньев механизма без учета сил, вызывающих движение. Определяющим фактором здесь является степень свободы механизма. Закон движения ведущих (начальных) звеньев известен, поэтому можно сказать, что кинематический анализ состоит в определении движения звеньев механизма по заданному движению начальных звеньев.
Основные задачи кинематического анализа следующие:
1)определение положений звеньев, включая определение траектории движения отдельных точек;
2)определение передаточных функций, скоростей и ускорений звеньев механизма.
Методы кинематического анализа:
1)аналитические;
2)графоаналитические;
3)графические;
4)экспериментальные.
В настоящее время аналитические методы анализа выходят на первое место, чему способствует развитие ЭВМ. Однако графоаналитические и графические методы хотя и уступают в точности получаемых результатов, широко распространены из-за своей наглядности и доступности.
2.1.1. Графическое определение положений звеньев механизма и построение траектории
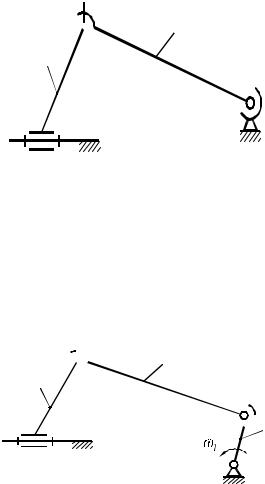
Для решения поставленной задачи должны быть заданы кинематическая схема механизма и закон движения ведущего (начального) звена. Для определения положений звеньев механизма кинематическая схема выполняется в масштабе. Для этого выбирается масштабный коэффициент l (м/мм), который показывает, сколько метров натуры содержится в одном мм чертежа.
26

Пусть задана схема механизма 2-го класса (рис. 2.1). Известны размеры звеньев механизма lAB, lBC, lCD, lAD и закон движения ведущего звена. Механизм имеет ведущее звено АВ.
 C
C
2
B
 3 1
3 1
А |
D |
Рис. 2.1
Построение начинается с определения положения неподвижных точек механизма А и Д (lAD). Затем описываем окружность радиусом lAB и вторую – радиусом lCD (рис. 2.2). Выбрав положение звена АВ, определяемое значением обобщенной координаты 1, находим методом засечек положение остальных звеньев ВС и СD.
|
S S1 |
C C |
|
|
1 |
||
B |
B1 |
C2 |
|
S2 |
|||
|
|||
|
B2 |
|
|
А |
S’ |
D |
C’



Рис. 2.2
Точно также можно найти ряд других положений механизма. Будем считать 1=const, тогда откладывая равные углы от положения кривошипа АВ, найдем положение меха-
27
низма АВ1С1D и т.д. Затем строим траекторию точки S, лежащей на звене ВС. При построении положений звеньев механизма при одном положении звена АВ звенья ВС и СD могут занимать два положения ВС и СD или ВС и C D. Это разные механизмы, здесь проявляет себя свойство – условие сборки.
В нашем случае допустим только первый вариант ВСD, т.к. при этом сохраняется требуемое направление угловой скорости звена СD – по часовой стрелке.
Второй вариант – В1С1D – это уже другой механизм, т.к. СD вращается против часовой стрелки.
2.1.2.Определение скоростей и ускорений точек звеньев методом планов
Втакой задаче исходными данными являются кинематическая схема механизма (рис. 2.3), закон движения ведущего звена, размеры звеньев механизма.
Дано: 1=const, размеры lAB, lBC, lCD, lAD, lBK, lKC.
Определить скорость точки К.
Схема механизма выполняется в масштабе.
K
B

 C
C
А |
|
D |
|
|
W=1
Рис. 2.3
Приступим к построению плана скоростей (рис. 2.4).
1. Определяем скорость точки В ведущего звена:
VB 1 AB , VB AB.
28

2. Выбрав полюс плана Р, откладываем в масштабе
|
V |
|
VB |
|
м с |
вектор скорости точки В VB (рис. 2.4, а). |
PB |
|
|||||
|
|
|
мм |
|||
|
|
12 |
|
|
|
|
3. Переходим к определению скорости точки С. Точка С принадлежит звену ВС и СD. Звено ВС совершает плоскопараллельное движение. Скорость точки С определяется по теореме сложения скоростей – скорость любой точки звена, совершающего сложное движение, определяется как сумма скоростей в переносном и относительном движении, т.е.
VC VB VCB .
VB является переносной скоростью в поступательном движении, VBC – относительная скорость во вращательном движении точки С вокруг точки В (направлена перпендикулярно к СВ).
|
|
|
|
P |
C |
|
|
|
|
|
|
|
K |
|
b12 |
|
B12 |
n |
|
|
|
c |
K |
|
а |
Рис. 2.4 |
б |
|
|
|
Строим на плане это направление: через точку в проводим линию, перпендикулярную к ВС. Из полюса проводим направление скорости точки С при ее движении вокруг D. Точка пересечения двух направлений дает положение точки С на плане. Скорость точки С определяется как
VC=(РС) V.
Чтобы найти скорость точки К, необходимо на векторе B12C построить вкс и сходственно с ним расположенное
Vк=(РK) V.
Это свойство плана скоростей носит название теоремы подобия скоростей.
29

2.1.3.Свойство планов скоростей
1.План скоростей – это плоский пучок лучей, исходящих из полюса. Каждый луч представляет собой вектор абсолютной скорости какой-то точки механизма.
2.Отрезки, соединяющие концы векторов, являются относительными скоростями.
3.Свойство подобия: фигуры, образованные на полюсе векторами скоростей, подобны фигурам, образованным звень-
ями механизма, повёрнутыми на 90 .
4. Возможность определения угловой скорости звеньев по величине и направлению:
2 VCB .
CB
План ускорений (рис. 2.4, б):
1)aBn 12 AB ;
2)aC aB aCB ; aCB aCBn aCB .
Ускорение точки звена, совершающего сложное движение, складывается из переносного ускорения и относительного нормального и касательного. В данном случае переносное ускорение по характеру поступательное, а относительное вращательное.
an |
|
VCB2 |
|
cB V 2 |
; |
|
|
|
|
||||
CB |
|
CB |
|
|
CB |
|
a |
||CB; |
a |
CB. |
|||
CB |
|
|
|
CB |
||
Второе уравнение:
aC aD aCDn aCD ;
a |
n |
|
VCB2 |
|
|
CD V 2 |
; |
|
|
|
|
|
|||||
CD |
|
CB |
|
|
CB |
|||
a |
|
||CD; |
|
a |
CD. |
|||
CD |
|
|
|
|
CD |
|||
30