

Учебное пособие 1878
.pdfРасчет болтов, установленных в отверстия с зазором
По табл. 4 [1] для стали Ст. 3 выбираем [σ]Т = 220 МПа. По табл.12 [3] выбираем коэффициент запаса прочности при неконтролируемой затяжке n = 2,5.
Определяем допускаемые напряжения на растяжение, срез и смятие [1,§37]:
P T 220 88МПа; n 2,5
С 0,3 Т 0,3 220 66МПа;СМ 0,8 Т 0,8 220 176МПа.
Принимаем коэффициент трения между полумуфтами f = 0,15 и коэффициент запаса от сдвига полумуфт К = 1,2 [3, §25.]. Потребная сила затяжки болта равна
|
|
|
P |
|
k P |
|
|
1,2 2,77 |
22,13кН . |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
зат |
|
|
f |
0,15 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Эквивалентное напряжение с учетом скручивания болта |
||||||||||||||||||||
при затяжке |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1,3 Pзат |
|
1,3 Pзат 4 |
, |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
экв |
|
|
F |
|
|
|
|
d2 |
P |
|||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||
откуда внутренний диаметр резьбы |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 1,3 22,13 103 |
|
|
|||||
d |
|
4 1,3 P |
|
|
|
|
20,4 см. |
|||||||||||||
|
|
|
|
зат |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1 |
|
|
|
P |
|
|
|
|
3,14 88 |
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
По табл. 3.3 [5] выбираем болт с ближайшим большим |
||||||||||||||||||||
внутренним диаметром резьбы, т.е. болт |
с резьбой М 24, |
|||||||||||||||||||
d1 = 20,752 мм, Р = 3 мм.
Болт также можно выбрать по табл. 3.10 [5] в зависимости от величины РЗАТ и принятого материала.
Расчет болтов, установленных вотверстия без зазора
|
|
|
4 |
|
|
Из условия прочности на срез |
|
|
P |
опре- |
|
|
|
d2 |
|||
|
СР |
|
СР |
||
деляем потребный диаметр стержня болта
161
d |
4 P |
|
|
4 2,77 103 |
7,3мм |
|
СР |
3,14 66 |
|||||
|
|
|
||||
Выбираем ближайший больший по размеру болт – М 8. Очевидно существенное уменьшение размеров болта (и всего соединения), установленного в отверстие без зазора (сравнить
М 8 и М 24).
Пример 8
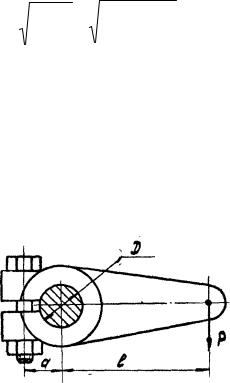
Рассчитать болт клеммового соединения (рис. 11.20), если
D = 20мм; Р= 400 кН; а = 20мм; ℓ = 300мм. Материал вала – сталь;материалрычага–чугун. Затяжкаболтанеконтролируемая.
Рис. 11.20. Схема к расчету клеммового соединения [13]
Решение
При расчете клеммового соединения с прорезью дополнительной силой затяжки болтов пренебрегают или учитывают её введением коэффициента К = 1,1. [1].
Полагая, что момент сил трения на 20 % превышает внешний момент М, т.е. коэффициент запаса от сдвига К = 1,2, тогда
МТ = 1,2М = 1,2P·ℓ.
Принимаем коэффициент трения f = 0,15.
162
|
Определяем усилие затяжки болта |
|
|||||||||||
P |
|
1,2 M |
|
|
|
1,2 P |
|
|
|
1,2 400 300 |
|
16кН . |
|
f 2a |
D |
0,15 2 20 |
20 |
0,15 2 20 20 |
|||||||||
зат |
|
|
|
|
|||||||||
По условию компоновки (рис. 11.11) диаметр болта не должен быть более 18 мм.
Определяем потребный диаметр болта из расчета (пример 7) или непосредственно по табл. 3.10 [5], выбираем болт М16, материал 12XH2. Предельная продольная осевая нагрузка для выбранного болта Р = 18 кН.
Пример 9
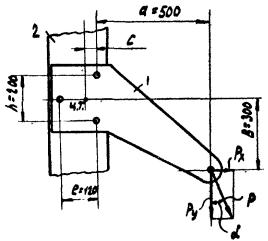
Рассчитать болты, с помощью которых полоса 1 прикреплена к металлической колонне 2 (рис. 11.21). Угол α = 30°; Р = 20 кН. Коэффициент трения в плоскости стыка f = 0,2. Материал полосы и колонны – сталь Ст.3. σТ = 240 МПа. Материал болтов – сталь 45 закаленная. σТδ = 580 МПа. Затяжка болтов неконтролируемая.
Рис. 11.21 [13]
163

Решение
Разложим силу Р на горизонтальную (Рx) и вертикальную (Рy) составляющие:
Рy = P·cos·30o = 20·0,86 = 17,2 кН;
Рx = P·sin·30o = 20·0,5 = 10 кН.
Перенесем силы Рx и Рy в центр тяжести треугольника c вершинами, совпадающими с центрами отверстий под болты (рис. 11.22), и добавим моменты
МРx = – Рx · b = – 10 · 0,3 = – 3 кН·м;
Рис. 11.22 [13]
МРy = Рy·(а+С) = 17,2·0,54 = 9,29 кН·м,
где С = (1/3)·ℓ = 40 мм.
Результирующий момент
МR = МР – МРx = 6,29 кН·м.
Силы и момент действуют в плоскости стыка и должны быть уравновешены силами трения.
164
Силу Рy уравновешивают три силы:
Р′y = Рy /Z = 17,2/3 = 5,73 кН·м.
Cилу Рx тоже уравновешивают три силы:
Р′y = Рx/Z = 10/3 = 3,33 кН.
Момент МR уравновешивают моменты трех сил Р', каждая из которых направлена перпендикулярно радиусу, проведенному от центра тяжести стыка к центрам сечений болтов. Болты нагружены неодинаково. Наиболее нагруженным является болт 1, воспринимавшийнаибольшую повеличинеравнодействующую сил:
P MRz rmax ,
r12 i 1
где rmax 
 1002 402 108 мм.
1002 402 108 мм.
6,29 100 10,8
P 82 10,82 10,82 22,9кН .
По схеме сил на рис. 11.13определим равнодействующую на болт 1:
R 
 Px 2 Py 2
Px 2 Py 2 
 3,332 5,732 6,63кН .
3,332 5,732 6,63кН .
Используя теорему косинусов, получим
R
 P 2 R 2 2 P R cos
P 2 R 2 2 P R cos

 22,92 6,632 2 22,9 6,63 0,78 28,4кН.
22,92 6,632 2 22,9 6,63 0,78 28,4кН.
Дальнейшее решение задачи аналогично решению, рассмотренному в примере 7.
165
ЗАКЛЮЧЕНИЕ
Вопросы, рассмотренные в учебном пособии, позволяют студентам правильно осмыслить основные положения дисциплины «Техническая механика».
Примеры позволяют более глубоко освоить теоретический материал и вырабатывают умения студентов использовать его при решении конкретных технических задач.
Учебное пособие призвано помочь формированию целостного представления о дисциплине «Техническая механика» и дать начальные сведения для изучения специальных технических дисциплин.
166
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Бутенин, Н.В. Курс теоретической механики: в 2 т. / Н.В. Бутенин, Я.Л. Лунц, Д.Р. Меркин. М.: Наука, 1985.
2.Аркуша, А.И. Техническая механика. Теоретическая ме-
ханика и сопротивление материалов / А.И. Аркуша. М.: Высш.
шк., 2002. 352 с.
3.Сопротивление материалов: лабораторный практикум: учеб. пособие / М.Д. Поскребко и др.. − Минск: Амалфея, 2001. − 272 с.
4.Артоболевский, И.И. Теория механизмов и машин /
И.И. Артоболевский. М.: Наука, 1988. 640 с.
5.Левитская, О.Н. Курс теории механизмов и машин / О.Н. Левитская, Н.И. Левитский. М.: Высш. шк., 1985. 279 с.
6.Решетов, Д.Н. Детали машин / Д.Н. Решетов. 4-е изд.,
перераб. и доп. М.: Машиностроение, 1989. 472 с.
7.Чернин, И.М. Расчеты деталей машин / И.М. Чернин, А.В. Кузьмин, Г.М. Ицкович. Минск: Вышейш. шк., 1978. 472 с.
8.Курмаз, Л.В. Детали машин. Проектирование: учеб. пособие / Л.В. Курмаз, А.Т. Скойбеда. 2-е изд., испр.: М.: Высш.
шк., 2005. — 309 с.
9.Колпаков, А.П. Проектирование и расчёт механических
передач / А.П. Колпаков, И.Е. Карнаухов. М.: Колос, 2000.
328с.
10.Иванов, М.Н. Детали машин: учебник для студ. машиностр. спец. Вузов / М.Н. Иванов, В.А. Финогенов. М.: Высш.
шк., 2002. 408 с.
11.Мягков, В.Д. Допуски и посадки: справочник: в 2 ч. /
В.Д. Мягков. Л.: Машиностроение, 1978.
12.Жилин, Р.А. Основы проектирования и конструирования деталей машин: учеб. пособие / Р.А. Жилин, Ю.Б. Рукин,
И.Ю. Кирпичев. Воронеж: ФГБОУВПО «Воронежский государствен-ный технический университет», 2011. − 300 с.
13.Жилин, Р.А. Расчёт соединений деталей машин: учеб. пособие / Р.А. Жилин, Ю.Б. Рукин, И.Ю. Кирпичев. Воронеж:
167
ФГБОУВПО «Воронежский государственный технический уни-
верситет», 2011. 215 с.
14.Жулай, В.А. Детали машин : курс лекций / В.А. Жулай ; Воронежский ГАСУ. –2-е изд., перераб. и доп. Воронеж, 2013. 238 с.
15.Рукин, Ю.Б. Теория механизмов и машин: Курсовое проектирование: учеб. пособие / Ю.Б. Рукин, В.А. Нилов, Р.А. Жилин, Д.В. Хван, В.В. Елисеев. Воронеж: ФГБОУ ВО
«Воронежский государственный технический университет», 2016. − 222 с.
16.Хван, Д.В. Основы теоретической и прикладной механики: учеб. пособие / Д.В. Хван, А.Д. Хван; Ю.Б. Рукин, Р.А. Жилин. Воронеж : ФГБОУ ВПО «Воронежский государственный
технический университет», 2014. 190 с.
17.Рукин, Ю.Б. Теория механизмов и машин: Курсовое проектирование: учеб. пособие / Ю.Б. Рукин, В.А. Нилов, Р.А. Жилин, Д.В. Хван, В.В. Елисеев. Воронеж : ФГБОУ ВО
«Воронежский государственный технический университет», 2016. − 222 с.
18.Жилин, Р.А. Расчёт и конструирование типовых деталей машин: учеб. пособие / Р.А. Жилин, Ю.Б. Рукин. Воронеж: ФГБОУВПО «Воронежский государственный технический уни-
верситет», 2012. 250 с.
19. Нилов, В.А. Основы проектирования и конструирования деталей машин: учеб. пособие / В.А. Нилов, Ю.Б. Рукин, Р.А. Жилин, О.К. Битюцких. Старый Оскол: ТНТ, 2011. − 312 с.
168
ОГЛАВЛЕНИЕ |
|
ВВЕДЕНИЕ.................................................................................. |
3 |
1. СТРУКТУРА МЕХАНИЗМОВ ............................................... |
4 |
1.1. Основные понятия и определения в теории |
|
механизмов и машин....................................................... |
4 |
1.2. Классификация кинематических пар............................... |
5 |
1.3. Структура и кинематика плоских механизмов.............. |
10 |
1.4. Структурная формула кинематической цепи общего |
|
вида................................................................................ |
11 |
1.5. Структурная формула плоских механизмов.................. |
13 |
1.6. Пассивные связи и лишние степени свободы................ |
14 |
1.7. Замена в плоских механизмах высших |
|
кинематических пар низшими...................................... |
16 |
1.8. Классификация плоских механизмов............................. |
18 |
1.9. Структурные группы пространственных механизмов.. |
24 |
2. АНАЛИЗ МЕХАНИЗМОВ.................................................... |
26 |
2.1. Кинематический анализ механизмов............................. |
26 |
2.2. Силовой анализ механизмов........................................... |
34 |
2.3. Определение реакций в кинематическихпарахгрупп |
|
Ассура............................................................................ |
41 |
3. ОБЩИЕ СВЕДЕНИЯ О ПРОЕКТИРОВАНИИ МАШИН... |
47 |
3.1. Стадии проектирования.................................................. |
47 |
3.2. Основные термины и определения ................................ |
48 |
4. ПЕРЕДАЧИ. ОБЩИЕ ВОПРОСЫ........................................ |
49 |
4.1. Назначение и классификация передач........................... |
49 |
4.2. Классификация передач.................................................. |
49 |
4.3. Основные кинематические характеристики передач .... |
50 |
4.4. Передачи с постоянным передаточным числом............ |
52 |
4.5. Передачи с переменным передаточным числом............ |
54 |
5. ЗУБЧАТЫЕ ПЕРЕДАЧИ....................................................... |
55 |
5.1. Общие сведения.............................................................. |
55 |
5.2. Механизмы с высшими парами...................................... |
56 |
5.3. Зубчатые механизмы с подвижными осями:................. |
65 |
169
5.4. Расчет основных геометрических параметров |
|
цилиндрических прямозубых колес.............................. |
67 |
5.5. Расчет основных геометрических параметров |
|
конических прямозубых колес...................................... |
72 |
6. ЗУБЧАТЫЕ РЕДУКТОРЫ. ОБЩИЕ СВЕДЕНИЯ............... |
75 |
6.1. Классификация редукторов............................................ |
75 |
6.2. Принципиальная конструкция цилиндрического |
|
редуктора....................................................................... |
77 |
6.3. Расчет основных конструктивных параметров |
|
редукторов..................................................................... |
79 |
7. РЕМЕННЫЕ ПЕРЕДАЧИ ..................................................... |
82 |
7.1. Общие сведения.............................................................. |
82 |
7.2. Кинематические и силовые зависимости....................... |
85 |
8. ЦЕПНЫЕ ПЕРЕДАЧИ........................................................... |
89 |
8.1. Общие вопросы............................................................... |
89 |
8.2. Классификация цепных передач.................................... |
90 |
8.3. Достоинства и недостатки цепных передач................... |
90 |
8.4. Детали цепных передач .................................................. |
91 |
8.5. Основные параметры цепных передач........................... |
95 |
9. ОСИ И ВАЛЫ........................................................................ |
98 |
9.1. Общие сведения.............................................................. |
98 |
9.2. Проектный расчет валов и осей...................................... |
98 |
9.3. Проверочные расчеты валов и осей............................. |
102 |
9.4. Проверочный расчет валов и осей на жесткость......... |
107 |
10. ПОДШИПНИКИ, МУФТЫ............................................... |
110 |
10.1. Подшипники................................................................ |
110 |
10.2. Муфты ......................................................................... |
114 |
11. СОЕДИНЕНИЯ.................................................................. |
121 |
11.1. 3аклепочные соединения............................................ |
121 |
11.2. Сварные соединения................................................... |
129 |
11.3. Шпоночные соединения............................................. |
137 |
11.4. Резьбовые соединения................................................ |
139 |
ЗАКЛЮЧЕНИЕ ....................................................................... |
166 |
БИБЛИОГРАФИЧЕСКИЙ СПИСОК..................................... |
167 |
170