

Учебное пособие 1684
.pdf
|
Из приведенных выражений видно, что для прим ене- |
|||
ния |
метода средней ординаты необходимо предвар итель- |
|||
но |
вычислить значения |
функции |
в |
конце первого учас т- |
ка интегрирования, т.е. |
значение |
у1. |
||
|
Естественно, что значение у1 |
необходимо вычислять |
||
одним из более точных методов, чем метод Эйлера. В частности, для этой цели можно применять метод Ру нгеКутта.
3. Метод Рунге-Кутта Метод Рунге-Кутта является более точным, но зато и более
трудоемким, чем метод Эйлера.. Он применяется, в основном, при интегрировании дифференциальных уравнений на ЭВМ.
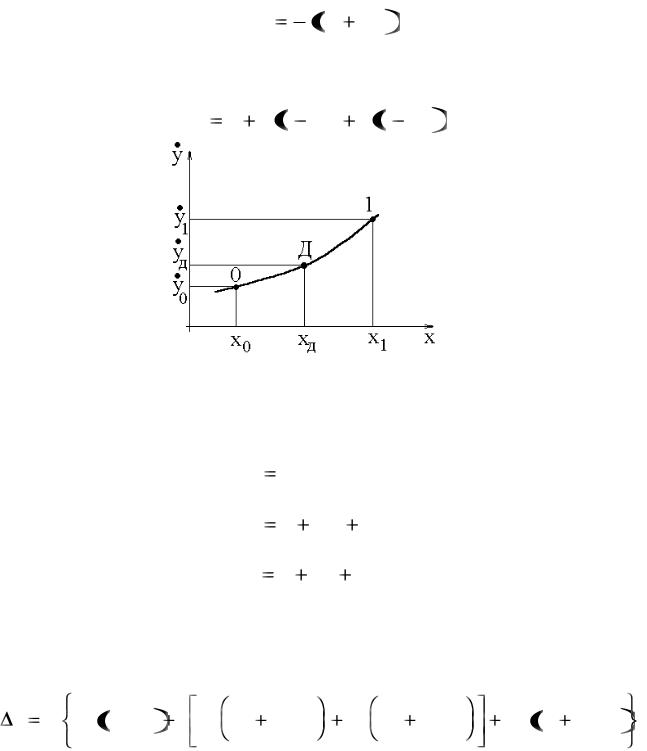
В методе Рунге-Кутта принимается, что производная искомой функции изменяется на каждом участке интегрирования по параболе.
Точки, через которые проходит парабола на участке интегрирования, можно определить следующим образом. Пусть требуется найти решение уравнения при начальном условии
|
|
y x0 |
y0 |
|
|
|
Выполним следующие действия (рис.5.6). По заданному урав- |
||||
нению вычислим значение |
производной |
в начальной точке |
|||
y0 |
f x0 , y0 . Из начальной точки |
O x0 , y0 |
проведем прямую |
||
|
y |
y0 |
y0 |
x x0 |
|
и |
определим ее значение |
ya в |
середине участка интегрирования, |
||
т.е.
h ya y0 y0 2
По заданному уравнению найдем значение производной в
83

|
Рис. 5.6 |
|
|
|
|||
точке А, имеющей координаты |
x0 |
|
|
|
h |
, ya , так что |
|
|
|
2 |
|||||
|
|
|
|
|
|
||
ya |
f x0 |
h |
, ya . |
||||
2 |
|
||||||
|
|
|
|
|
|
|
|
Из начальной точки O x0 , y0 проведем прямую |
|||||||
y |
y0 |
ya |
x |
|
|
x0 |
|
и определим ее значение yв в |
середине участка интегрирования, |
||||||
т.е. |
|
|
|
|
|
|
|
h yв y0 ya 2
По заданному уравнению найдем значение производной в точке
В, имеющей координаты x0 h2 , yв , так что
yв |
f |
x0 |
h |
, yв |
|
2 |
|||||
|
|
|
|
||
Из начальной точки O x0 , y0 |
проведем прямую |
||||
y |
y0 |
yв x |
x0 |
||
и определим ее значение в конце участка интегрирования, т.е.
y1 y0 yвh
По заданному уравнению найдем значение производной в конце участка интегрирования, т.е.
y1 f x0 h, y1
84
Примем значение производной в середине участка интегрирования равным
1
yд 2 yа yв
Через точки О, Д, 1 (рис. 5.7) проведем параболу, уравнения которой
y а в x x0  c x x0 2
c x x0 2
Рис. 5.7 Значения коэффициентов а, в, с найдем из условия прохождения
параболы через точки О, Д, 1, т.е. из системы уравнений
|
|
|
|
y0 |
a |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
yд |
a |
в |
h |
c |
h2 |
|
|
|
|
|
|||
|
|
|
|
2 |
4 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
y |
1 |
a |
вh |
|
ch2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найдя значения |
коэффициентов а, |
в, с |
и подставив их в уравне- |
||||||||||||||
ние параболы, проинтегрируем последнее |
от y0 до y1 и |
от x0 до x1 . |
|||||||||||||||
В |
результате |
получим следующую |
формулу |
для |
приращения |
||||||||||||
функции на участке интегрирования. |
|
|
|
|
|
|
|||||||||||
y |
|
h |
y0 x0 , y0 |
2 ya x0 |
h |
, ya |
|
|
yв |
x0 |
|
h |
, yв |
yв x0 h, y1 |
|||
6 |
2 |
|
|
2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
5.4. Схема расчета программных неустановившихся движений самолета
85
При расчете программных движений самолета закон изменения угла наклона траектории есть известная функция времени, т.е.  t
t f t
f t , так что t
, так что t f t
f t также есть известная функция
также есть известная функция
времени. В этом случае уравнения движения самолета имеют следующую форму записи
|
g |
|
P |
Q |
sin |
|
|
|
||
V |
|
|
G |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
cos C |
y |
0 |
Sq |
|||
|
|
|
g |
|
||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
Cy Sq P
H V sin 
Предполагается, что уравнение поляры самолета имеет вид
Cx M Cx0 M B M Cy M |
2 |
0 |
и что зависимости P t , G t , Cx0 M , Cy M , B M заданы. Заданы также начальные условия V0 , H0 .
Применяя к уравнениям движения самолета любой из рассмотренных методов численного интегрирования, можно получить зависимости V t , H t , t . Далее по уравнению 

 мож-
мож-
но определить потребный закон управления углом тангажа, и соответственно законы изменения тангенциальной и нормальной перегрузок.
Учитывая, что t z , можно определить закон изменения
z , можно определить закон изменения
угловой скорости тангажа по времени. И, наконец, из уравнения моментов
Jz z |
Mz H, M, , , z , в |
можно найти потребный |
закон управления рулем высоты в t . |
Кроме этого, интегрируя уравнение , можно найти пройденное самолетом расстояние по горизонтали. В частности, при применении метода Эйлера уравнения движения самолета можно проинтегри-
ровать по следующей схеме. |
|
|
|
По уравнениям |
или графикам |
находят начальное |
значение |
P t , G t , Cx0 M , Cy |
M , B M . По |
уравнению движения |
опреде- |
86
ляют значение угла атаки в начальный момент времени и по уравнению поляры - значение коэффициента лобового сопротивления.
По остальным уравнениям движения самолета определяют значения производных V 0 , H 0 , L 0 в начальный момент вре-
мени.
Далее находим значение скорости, высоты и дальности в
момент времени t1 = t0 + t , где |
t - шаг интегрирования, выбирае- |
|
мый в зависимости от требуемой точности расчетов. |
||
Таким образом, |
V t |
|
V1 V0 |
||
|
|
|
|
|
0 |
H1 H0 H L1 L0 L
0
0
t
t
Затем расчет повторяют для моментов времени t1 и t2 т.д. Все расчеты сводят в таблицы, а результаты расчетов обычно представляют в виде графиков.
6. Движение самолета при наличии
кинематических связей
6.1 Наведение самолета-перехватчика
по кривой погони
При наведении по кривой погони кинематическая связь состоит в том, что вектор скорости перехватчика в каждый момент времени направлен на цель. Этот метод является одним из первых разработанных мет одов наведения. Наиболее просто реализуется он в си стеме самонаведения.
В общем случае траектория наведения представл яет собой пространственную кривую. Для простоты б удем полагать, что она лежит в неизменной вертикал ьной плоскости.
87
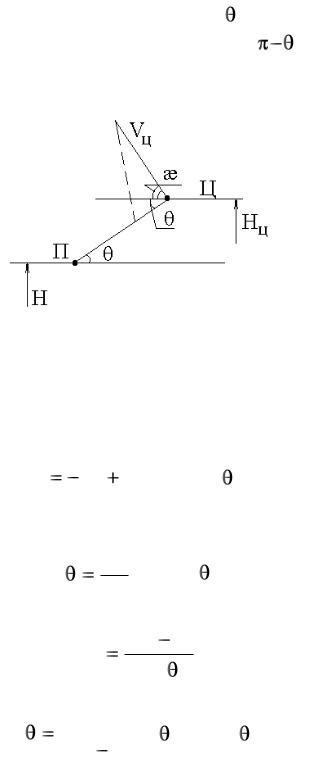
Схема наведения перехватчика при перехвате в ве р- тикальной плоскости на встречно -пересекающихся курсах приведена на рис. 6.1. Перехватчик находится в
точке П, цель - в точке Ц. Угол ж= ц |
при перехвате на |
встречнопересекающихся курсах, и ж= |
ц - при перехва- |
те на попутно-пересекающемся. Остальные обознач ения ясны непосредственно из рис. 6.1.
Рис. 6.1
Пусть r - расстояние между перехватчиком и целью.
Тогда, |
как |
видно из |
рис. 6.1, относительная |
скоро сть |
||
сближения |
перехватчика |
и цели |
определяется |
равенс т- |
||
вом: |
|
|
|
|
|
|
|
|
r |
[V |
Vц cos(ж+ |
)] , |
|
а угловая скорость поворота вектора скорости |
пер ехват- |
|||||
чика - |
равенством |
|
|
|
|
|
Vrц sin(ж+ ) .
Из рис. 6.1 следует, что
r Hц H , sin
с учетом соотношения для r имеем, что
|
Vц |
|
|
H ц H |
sin sin(ж+ ) . |
Последнее соотношение и является тем дополнител ьным уравнением движения перехватчика, при соблюд ении которого обеспечивается его наведении по кривой пог они в вертикальной плоскости.
88
Таким образом для определения траектории движ е- ния перехватчики в вертикальной плоскости при нав едении по кривой погони необходимо решить уравнения движения самолета совместно с полученным кинемат ическим соотношением при заданных начальных услов иях, заданных характеристиках перехватчика и при з аданной траектории движения цели.
В общем случае эта система уравнений может быть решена только численными методами.
Для выяснения основных свойств кривой погони предположим, что цель выполняет горизонтальный (ж=0) полет с постоянной скоростью и что скорость перехва т- чика также постоянна. В этом случае кинем атические уравнения кривой погони можно рассматр ивать независимо от остальных уравнений движения п ерехватчика.
Разделим |
эти уравнения |
|
|
|
одно на |
другое. В резул ьта- |
|||||||||||||||||||||
те получим следующее равенство: |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
dr |
|
|
|
|
V |
|
|
|
|
ctg |
d |
, |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
r |
|
|
sin |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vц |
|
|
|
||||||
Интегрируя получим соотношение в пределах от ro до r и от |
|||||||||||||||||||||||||||
о до , где ro и |
о - начальные условия, а r и текущие значе- |
||||||||||||||||||||||||||
ния, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
r dr |
|
|
|
|
|
|
d |
|
|
|
|
cos |
d |
, |
||||||||||
|
|
|
V |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
ro r |
o sin |
0 |
sin |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||
или |
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
d |
ln sin . |
||||||
|
|
ln r |
|
|
|
|
V |
|
|
|
|||||||||||||||||
|
|
|
ro |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
o |
sin |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Интегралы первый и последний стандартные. |
|
||||||||||||||||||||||||||
Интеграл |
|
d |
можно вычислить следующим образом. |
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
o sin |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Представим sin |
как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
89

|
|
|
|
|
|
2sin |
|
cos |
|
|
|
|
|
|
|
2sin |
|
|
cos |
|
|
|
|
|
|
|
|
2tg |
|
|
|
|
|
|
|
||||||||||
|
sin |
2 |
2 |
2 |
2 |
|
2 |
. |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
sin2 |
|
|
|
|
cos2 |
|
|
|
|
|
1 |
tg |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
||||||
Обозначим tg |
|
|
|
t , получим, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
2t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
t2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
и что = 2 arctg t и |
d |
|
|
2dt |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
1 t2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
После доставки получим, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
d |
|
dt |
ln t |
|
|
|
ln tg |
|
|
ln |
|
sin |
|
|
ln |
1 cos |
. |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
sin |
|
|
t |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
cos |
|
|
|
sin |
|
|
|||||||||||||||||||
После вычисления всех интегралов получим |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
sin |
|
0 |
|
|
|
|
|
|
|
|
|
0 . |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
ln r |
V ln |
|
|
|
|
|
ln sin |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
ro |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
После подстановки пределов и потенцирования получим, что расстояние между перехватчиком и целью равно:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
k |
(1 |
cos |
|
|
)V |
|
|
, |
||||
|
|
|
|
|
|
|
|
|
|
||||
|
(sin )V 1 |
||||||||||||
|
|
|
|
|
|
|
|||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
k |
|
|
(sin 0 )V 1 |
|
. |
||||||||
|
|
|
|
|
|
0 ) |
|
|
|||||
(1 |
cos |
V |
|||||||||||
Из последнего соотношения следует, что в момент встречи перехватчика и цели, т.е. при r = 0 должно выполняться условие
1 + cos = 0 ,
из которого вытекает, что в момент встречи cos = - 1
или
=.
Таким образом даже при перехвате в передней полусфере перехватчик подходит к цели сзади, так что в момент встречи траектория цели является касательной к траектории перехватчика.
90

Подставив выражение для расстояния между перехватчиком и целью в соотношение для угловой скорости разворота траектории перехватчика, получим следующее выражение
|
Vц |
|
sin |
v 2 |
||
|
|
|
|
. |
||
|
k |
|
1 cos |
v |
||
|
|
|
|
|||
Из последнего равенства невозможно определить значение угловой скорости разворота траектории перехватчика в момент встре-
чи, так |
как |
при = |
|
|
|
последнее равенство |
|
превращается в неоп- |
||||||||||||||||||||||||||||||||||||
ределенность вида 0/0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Преобразуем это равенство. Учитывая, что |
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
tg |
|
|
|
|
|
|
2 |
|
|
|
, |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
1 |
|
cos |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
и что |
sin2 |
|
4 sin2 |
|
|
cos2 |
|
|
, представим последнее равенство в |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4V |
|
|
|
|
v |
2 |
|
|
|
cos2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
ц |
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||
В свою очередь это равенство представим в виде |
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
4Vц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
sin |
|
v 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
. |
||||||||||||||||
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
v |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
2 2
Из последнего равенства с учетом свойств предельных переходов следует, что значение угловой скорости в момент встречи, т.е.
|
вст |
lim , |
|
|
91
зависит от значения |
v , т.е. от соотношения скоростей перехватчи- |
|||||||||
ка и цели. |
|
|
|
|
|
|
|
|
|
|
А именно, |
|
|
|
|
|
|
|
|
||
при v <2 |
вст |
0 |
; |
|
|
|
|
|
||
при v =2 |
|
|
|
4Vц |
; |
|
|
|
|
|
|
вст |
|
k |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
вст |
|
|
|
|
|
|
|||
при v >2 |
|
|
. |
|
|
|
|
|
||
Из соотношения |
|
|
|
|
|
|||||
|
|
|
|
|
|
n |
|
V |
|
cos , |
|
|
|
|
|
|
y |
g |
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
вытекающего из уравнения движения самолета следует, что нор-
мальная |
перегрузка |
перехватчика в момент встречи с целью |
при |
v 2 также должна |
быть бесконечно большой. |
|
|
Так |
как максимальное значение перегрузки перехватчика |
яв- |
|
ляется величиной ограниченной, то при v >2 перехватчик в некоторый момент времени сойдет с кривой погони и будет двигаться по дуге минимального радиуса.
Расчеты показывают, что и в других случаях при подходе перехватчика к цели требуется весьма большие значения перегрузки для удержания его на кривой погони.
Таким образом, основным недостатком наведения по кривой погони является необходимость обеспечения перехватчику больших нормальных перегрузок.
6.2. Наведение самолетаперехватчика по методу параллельно-
го сближения
При наведении перехватчика по методу параллельного сближения кинематическая связь состоит в том, что вектор скорости перехватчика в каждый момент времени направлен в мгновенную точку встречи перехватчика и цели, т.е. в ту точку, в ко-
торой произошла |
встреча, если |
бы скорости перехватчика и цели |
в течение всего |
дальнейшего |
времени оставались неизменными |
по величине и направлению. |
|
|
Метод параллельного сближения, так же как и метод погони, может быть реализован системой самонаведения. Схема перехвата
92