

Учебное пособие 1684
.pdfдержащей вектор скорости полета. Ось z перпендикулярна плоскости xy и направлена так, чтобы система была пр а- вой.
Положение траекторной системы координат отн осительно земной определяется двумя углами: углом н аклона
траектории |
и углом пути или |
углом |
курса |
с . |
|
|
|||
Углом |
наклона |
траектории |
называется |
угол |
между |
||||
вектором |
скорости |
и |
местной горизонтальной |
пло ско- |
|||||
стью. |
|
|
|
|
|
|
|
|
|
Углом |
пути |
или |
углом |
курса |
с называется |
угол |
|||
между проекцией |
вектора скорости на |
местную |
гор изон- |
||||||
тальную плоскость и некоторым направлением на ней, принятым за начальное.
Скоростная система координат . Начало системы координат помещается в центре масс самолета. Ось oxа на-
правлена вдоль вектора воздушной скорости, ось oyа помещается в плоскости симметрии самолета и напра влена вверх в нормальном полете. Относительное полож ение скоростной и связанной системы координат оп ределяется
двумя углами: углом |
атаки |
и |
углом |
скольжения . |
Углом атаки |
называется |
угол |
между проекцией |
|
вектора воздушной скорости полета на вертикальную
плоскость симметрии самолета и осью x1 связанной системы координат.
Углом скольжения  называется угол между вектором скорости полета и вертикальной плоскостью си м-
называется угол между вектором скорости полета и вертикальной плоскостью си м-
метрии |
самолета. |
|
|
Полусвязанная система координат . Начало полусвя- |
|||
занной |
системы координат помещается в |
центре |
масс |
самолета. Ось x направлена по проекции вектора |
ск оро- |
||
сти на |
вертикальную плоскость симметрии |
самолета. Ось |
|
y перпендикулярна оси x , лежит в вертикальной плоскости симметрии самолета и направлена вверх в нормальном полете. Ось z
перпендикулярна оси x , лежит в вертикальной плоскости симметрии самолета и направлена вверх в нормальном полете. Ось z перпендикулярна плоскости x
перпендикулярна плоскости x y
y и направлена так, чтобы система была правой.
и направлена так, чтобы система была правой.
13
Применение в аэромеханике самолета различных систем координат объясняется тем, что силы, дейс твующие на самолет, определяются в различных сист емах координат. Так, сила тяжести самолета определяется в земной системе координат, тяга - в связанной, аэродинамические силы - в полусвязанной системе коо рдинат. Кроме того, траектории движения самолета на иболее удобно исследовать в скоростной системе коо рдинат.
Переход от одной системы координат к другой осуществляется с помощью таблиц направляющих к осинусов, приведенных в рекомендованной литературе.
1.4. Уравнения движения самолета
Составим уравнения движения самолета как мат ериальной точки в пр оекциях на оси скоростной сист емы координат. Согласно принципу Даламбера, сумма прое к- ций всех сил, действующих на самолет, включая силу инерции, равна нулю. Таким образом, проектируя с пом о- щью таблиц направляющих косинусов, силы, дейс твующие на самолет, на оси скоростной системы коо рдинат, и учитывая, что сила тяги может составлять, угол  с осью
с осью
x1 связанной системы координат, |
пол учим |
следующие |
||||||||||
уравнения движения самолета. |
|
+ |
|
Zsin |
- Gsin |
|||||||
mV = Pcos ( |
- |
)cos |
- Qcos |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
mV |
= |
P[sin ( - |
)cos |
c + cos ( |
|
- |
)sin |
sin |
c ] - |
|||
- Qsin |
sin c |
+ Ycos |
c - Zcos |
sin |
c |
- Gcos |
|
|
||||
- mVcos |
c |
P[sin ( |
- |
)sin |
c |
- cos ( - |
)sin cos c ] + |
|||||
+ Qsin |
cos |
c + Ysin |
c + Zcos |
cos |
c . |
|
|
|||||
Полученные уравнения описывает пространственную тр а- екторию полета самолета при наличии углов крена и скольжения. Уравнения движения самолета являются н е- линейными дифференциальными уравнениями, не име ю- щими аналитических методов решения. В каждом ко н- кретном случае они могут быть решены только числе н- ными методами.
14
Уравнения можно несколько упростить, если учесть, что при полетах самолето в в плотных слоях атмосферы
углы |
атаки |
и |
скольжения |
не |
велики. |
Поэтому |
без |
|||||
большой погрешности можно принять, что |
|
|
|
|||||||||
cos |
|
cos |
cos |
|
1 |
и sin |
, |
sin |
, |
sin |
||
( |
- |
|
- . |
|
|
|
|
|
|
|
|
|
В этом случае уравнения принимают вид : |
|
|
|
|||||||||
mV = P - Q + |
Z |
- Gsin |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
mV |
= P[( |
- |
)cos |
c + sin |
c ] - Q sin c |
+ Ycos |
c |
- |
||||
Zsin |
c |
- Gcos |
|
|
|
|
|
|
|
|
||
- mVcos |
c |
P[( - |
)sin |
c - |
cos |
c ] + Q |
cos c |
+ |
|
|||
+ |
Ysin |
c + Zcos cos |
c . |
|
|
|
|
|
|
|||
|
|
|
1.5. Понятие о перегрузке самолета |
|
|
|||||||
|
Понятие |
коэффициента |
перегрузки или |
просто |
п ере- |
|||||||
грузки весьма широко п рименяется как в аэромех анике самолета, так и ряде других дисциплин. Это об ъясняется тем, что перегрузка самолета связана с м аневренностью самолета и с действующими на самолет силами.
Под маневренностью самолета понимается быстрота изменения скорости полета по величине и направл ению.
Очевидно, что быстрота изменения скорости полета по величине и направлению определяется величиной тангенциального и нормального ускорений. Таким обр а- зом, маневренность самолет а характеризуется его сп особностью создавать ускорения. Причем, так как инт ерес представляет именно способность самолета созд авать ускорения, то необходимо исключить из рассмо трения ускорение силы тяжести.
|
Пусть |
N - равнодействующая всех сил, действу ющих |
|
на |
самолет |
за исключением |
силы тяжести. Тогда уск оре- |
ние |
центра |
масс самолета a |
равно |
a
N + mg
m
15
Если в качестве единицы измерения взять уск орение сила тяжести, то получим относительно е ускорение центра масс самолета
|
|
|
|
|
|
|
|
|
g |
|
||
a |
|
|
|
N |
|
|||||||
g |
|
mg |
|
g |
|
|||||||
Вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
n |
|
|
N |
|
|
N |
, |
|||||
mg |
G |
|||||||||||
|
|
|||||||||||
представляющий собой отношение геометрической суммы всех сил, действующих самолет, кроме силы т яжести, к весу называется вектором перегрузки. Напра вление век-
тора |
перегрузки |
n совпадает с направлением вектора |
||||
силы |
N, |
а |
модуль |
вектора перегрузки |
показ ывает во |
|
сколько |
раз вектор силы N больше |
веса |
самолета. Обыч- |
|||
но вектор |
перегрузки n задают в |
виде |
его составляю- |
|||
щих на оси какой - либо |
|
|
системы координат. |
|||||||||||
1.6. Связь между перегрузкой самолета и |
||||||||||||||
характером |
|
траектории полета |
||||||||||||
Пользуясь понятием перегрузки, уравнения движ ения |
||||||||||||||
самолета можно представить в |
виде: |
|||||||||||||
|
1 dV |
|
|
nx |
sin |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
g dt |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||
|
V d |
|
|
|
ny |
cos |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
g dt |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
V |
|
cos |
|
d |
c |
|
nz |
|||
|
|
|
|
g |
|
dt |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
где
16
nx |
P |
Q |
Z |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ny |
P[( |
- |
)cos |
c |
sin |
c ] - Q |
sin |
c |
+ Ycos |
c |
Z sin |
c |
||||||
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nz |
P[( |
- |
)sin |
c |
cos |
c ] - Q |
cos |
c |
+ Ysin |
c |
Zcos |
c |
||||||
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если |
в |
последних |
равенствах |
положить |
с = 0, то |
полу- |
||||||||||||
чим формулу для |
составляющих |
вектора перегрузки с а- |
||||||||
молета в поточной |
системе |
координат: |
||||||||
|
nx |
|
P |
Q |
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
G |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
ny |
P( |
- |
) |
Y |
|||||
|
|
|
|
|
|
|
|
|||
|
|
G |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
nz |
(P - Q) |
|
Z |
||||||
|
|
|
|
|
|
|
|
|||
|
|
G |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
Составляющие nx , ny , nz вектора перегрузки самолета в поточной системе координат носят название танге нциальной, нормальной и боковой перегрузки самолета.
Полученные соотношения позволяют установить связь между величинами проекцией вектора перегрузки самолета на оси скоростной системы координат и х а-
рактером |
|
траектории самолета. |
|
|
|
|
|
|
|
|
|
Так |
, |
из первого |
соотношения |
следует, |
что |
при |
|||||
nx= sin |
движение самолета будет равномерное; при |
nx |
|||||||||
sin - ускоренное и при nx |
sin |
- |
замедленное. |
|
|
||||||
Из второго соотношения следует, что при ny |
= cos |
||||||||||
проекцией |
траектории |
самолета |
на |
местную |
верт икаль- |
||||||
ную плоскость будет прямолинейной; при ny |
|
cos |
- |
||||||||
будет искривляться вверх и при ny |
cos |
- |
вниз . |
|
|
||||||
Из |
третьего соотношения |
следует, |
что |
при |
nz |
= 0 |
|||||
проекция траектории самолета на координатную плоскость xz, наклоненную под углом к местной горизон-
тальной плоскости, будет прямолинейным; при nz > 0 -
> 0 -
17

будет искривляться |
в |
сторону |
правого крыла и при |
||||
nz < 0 - |
в сторону левого крыла. |
|
|
|
|||
Итак, при nz = 0 полет самолета происходит в н еиз- |
|||||||
менной |
вертикальной |
плоскости, при nz = 1 и |
|
= 0 полет |
|||
самолета |
происходит |
в |
горизонтальной плоскости. След о- |
||||
вательно, при горизонтальном |
прямолинейном |
п олете |
|||||
самолета ny = 1 и nz = 0, при |
горизонтальном |
прямолине й- |
|||||
ном установившемся |
полете |
самолета nx= 0, |
ny |
= 1, nz = |
|||
0. |
|
|
|
|
|
|
|
|
2.Установившееся |
движение самолета |
|
||||
2.1. Основные определения
Строго говоря, любое движение самолета является неустановившимся. Действительно, даже в случае пр ямолинейного горизонтального полета вес самолета из - за выгорания топлива непрерывно меняется и для выпо лнения горизонтального полета с постоянной скоростью н е- обходимо непрерывно изменять угол атаки самолета и тягу двигателей. Однако для многих типов самолетов п а- раметры движения меняются с течением времени д о- вольно медленно. В этом случае без большой погре шности можно пользоваться уравнениями установившег ося движения, т.е. пренебрегать небольшими силами ин ерции, обусловленными изменением кинематических параметров движения самолета. Неустановившиеся дв ижения самолета, при исследовании которых можно пользоваться ура в- нениями установившегося движения, называются квази у- становившимися движениями. В дальнейшем для краткости эти движения самолета будем называть просто уст а- новившимися. Причем, под устан овившимся движением будем понимать не только уст ановившееся движение по отношению ко всем кинематическим параметрам, но и по отношению к одному параметру или некоторой их ко м- бинации.
18
2.2. Метод тяг Н.Е. Жуковского
Как уже отмечалось, расчет установившихся реж имов полета часто называют аэродинамическим расч етом самолета.
В основе всех методов аэродинамического расчета самолета лежит сопоставление значения какого - либо параметра, потребного для выполнения режима полета, со значением этого же параметра, которое обеспечив ает установленные на самолете двигатели, т.е. с расп олагаемым значением этого параметра. Равенство п отребного и рас-
полагаемого значений выбранного пар аметра |
обеспечива- |
ет установившийся режим полета. В качестве |
сопостав и- |
мого параметра можно использовать силу |
тяги, |
мо щ- |
ность, расход топлива, число оборотов двигателей и |
т.д. |
|
Н.Е. Жуковский использовал в качестве |
сопостав имо- |
|
го параметра тягу двигателя и разработал в начале 1900 годов графический метод решения уравнений у становившегося движения самолета, аэродинамические характ еристики которого не зависят от числа М полета.
Рассмотрим расчет установившихся движений с амолета в вертикальной плоскости усовершенствованным м е- тодом тяг Н.Е. Жуковского, учитывающим завис имость аэродинамических характеристик самолета от числа М
полета. |
Будем |
полагать, что углы |
скольжения и |
крена |
равны |
нулю. |
|
|
|
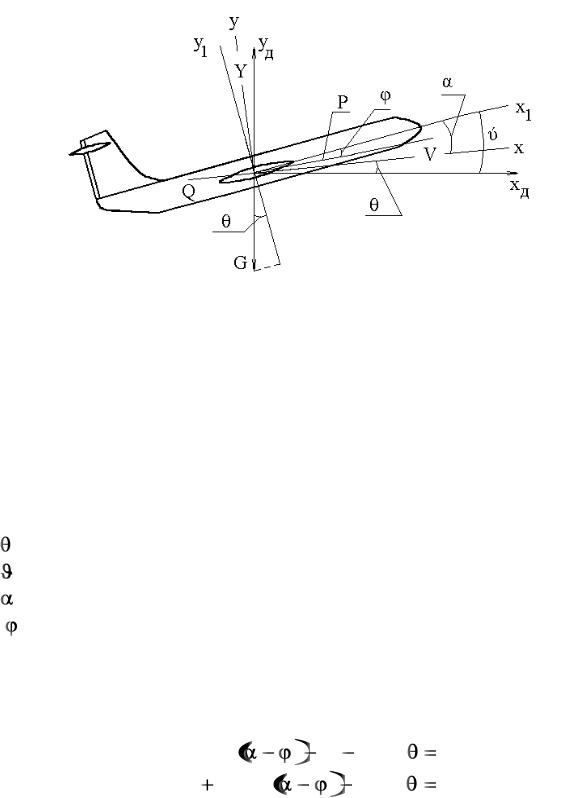
Установившееся движение самолета в вертикальной |
||||
плоскости изображено при принятых |
допущениях |
на рис. |
||
2.1, на |
котором |
приняты следующие |
обозначения: |
|
19
|
|
Рис. 2.1 |
xд , yд - |
оси земной системы координат; |
|
x1 , y1 - |
оси связанной системы координат; |
|
x , y |
- |
оси скоростной системы координат; |
P |
- |
тяга; |
G |
- |
вес самолета; |
V |
- |
скорость полета самолета; |
Y |
- |
подъемная сила; |
Q |
- |
лобовое сопротивление; |
-угол наклона траектории;
-угол тангажа;
-угол атаки;
-угол между направлением тяги и осью x1 . Проектируя силы, действующие на самол ет на оси
скоростной системы координат, получим следующие уравнения установившегося движения самолета в ве ртикальной плоскости:
Pп cos |
Q G sin |
0 |
; |
Y Pп sin |
G cos |
0 |
, |
где Pп - потребная тяга для выполнения выбранного |
|||
режима установившегося полета. |
|
|
|
Из первого уравнения следует, |
что |
тяга, потребная |
|
для выполнения выбранного |
режима |
полета равна: |
|
20
P |
|
1 |
C |
S 0,7p |
|
M 2 |
G sin |
, |
|
|
H |
||||||
|
|
|||||||
п |
cos |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
где pH - давление воздуха на заданной высоте. Подставляя полученное значение потребн ой тяги во
второе уравнение, придем к следующему соотнош ению:
Cy |
Cx tg |
M2 0,7pHS G cos |
sin |
tg |
. |
При заданной высоте H, т.е. pH , числе М и угле на- |
|||||
клона |
траектории |
, неизвестными в |
этом |
соотношении |
|
будут |
угол атаки |
и аэродинамические |
коэффициенты |
||
Сy и Сx .
Вместо недостающих двух уравнений воспользуемся известными для рассматриваемого самолета зависим о- стями
Сy = Сy ( , M ) и Сx = Сx (Сy , M ) .
Потребные значения , Сy и Сx можно получить методом последовательны х приближений, проведя предварительно следующие преобразования.
Обозначив
|
C |
y |
C |
y |
C |
tg |
|
M2 |
, |
|
|
|
|
|
x |
|
|
|
|
|
|||
представим полученное соотношение в виде |
|
||||||||||
|
Cy 0,7pHS |
|
G cos |
|
sin |
tg |
. |
|
|||
Кроме этого , зная величину |
угла |
и |
используя |
зави- |
|||||||
симости |
Сy = Сy ( |
|
|
, M ) |
и |
Сx = Сx (Сy , M ), по |
полу- |
||||
ченному |
соотношению |
|
построим |
зависимости |
|||||||
С y = С y ( |
, M). Расчет |
|
величины |
потребной тяги |
мо жно |
||||||
теперь вести в следующей последовательности. |
|
||||||||||
Для каждой высоты задаются рядом значени й угла |
|||||||||||
наклона траектории |
|
|
и |
для |
каждого |
в свою очередь |
|||||
задаются рядом значений числа М. В первом приближе-
нии принимают, что sin tg( |
- )=0 и для каждой ком- |
||||
бинации |
H и |
определяют |
величину С y1 первого при- |
||
ближения |
по |
формуле |
|
|
|
|
|
Cy1 |
G cos |
. |
|
|
|
|
|
||
|
|
0,7pHS |
|||
|
|
|
|
||
21
По найденному значению С y 1 для |
каждого |
значения |
||||||||||||
числа |
М, |
использую |
построенные |
зависимости |
||||||||||
С y = С y ( |
, M), определяют значение |
угла |
атаки |
|
1 пер- |
|||||||||
вого приближения. |
|
|
|
|
|
|
|
|
|
|
||||
Подставив |
найденное |
значение |
|
1 |
в |
|
преобразованное |
|||||||
соотношение, |
определяют |
значение С y |
2 |
второго |
|
прибли- |
||||||||
жения по |
формуле |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Cy2 |
G cos |
sin |
tg |
1 |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
0,7 pH S |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Повторяя |
|
расчеты, получают С y |
|
в |
третьем |
и |
после- |
|||||||
дующих приближениях. |
|
|
|
|
|
|
|
|
|
|
||||
Расчеты |
показывают, |
что |
после |
нескольких |
циклов |
|||||||||
результаты получаются близкие к окончательным. Опр е-
делив |
с необходимой точностью |
значения С y и |
и |
имея |
зависимости Сy = Сy ( , M) и |
Сx = Сx (Сy, M), нахо- |
|
дят значения Сy |
и Сx . Далее определяют потребную для |
||||
данного режима |
полета тягу. |
|
|
|
|
|
Соответствующая скорость |
полета |
равна V = M |
a H , |
|
где a H - скорость |
звука на данной высоте полета. |
|
|||
|
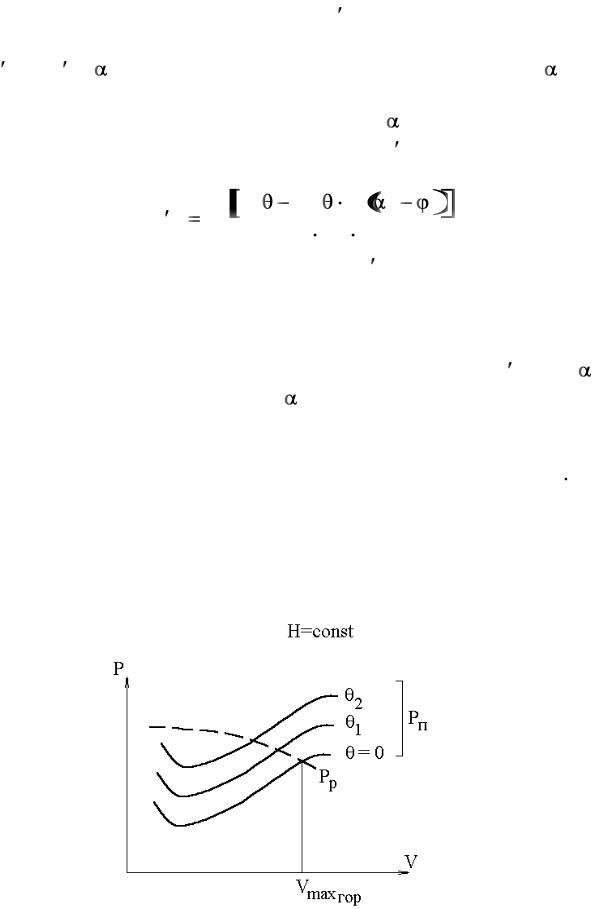
Проведя расчеты для всех |
желаемых значений |
M и |
||
H, строят для каждой высоты |
полета сетку потре бных |
||||
тяг. |
Затем на нее наносят кривую |
располагаемой |
тяги |
||
для |
заданного режима работы двигателей (рис. 2.2). |
Оч е- |
|||
Рис. 2.2
22