

Учебное пособие 1684
.pdfвидно, что точкам пересечения кривых располагаемой и потребной тяг будут соответствовать режимы прямол и- нейного установившегося полета самолета с min и max скоростями. В частности максимальное число M (максимальная скорость) горизонтального полета соо тветствует правой точке пересечения кривых распол агаемой и потребной тяг при = 0.
Аналогично минимальное число M (минимальную скорость) горизонтального полета можно определять как число M (скорость), соответствующее левой точке перес е- чения кривых располагаемой и потребной тяг при = 0. Однако в ряде случаев этой скорости полета соответствует полет самолета под очень большими у глами атаки, при которых крыло работает в условиях сорван ного потока, и самолет не обладает необход имой устойчивостью и управляемостью. В этом случае минимальную скорость горизонтального полета (минимальное число M) определяют как скорость, соо тветствующую наибольшему
допустимому по условиям безопасности |
полета углу ат а- |
||
ки бе з |
и значению |
С y без . |
|
Из |
уравнений |
движения следует, |
что определен ная |
таким образом минимальная скорость горизонтального полета равна:
Vmin |
|
|
2G |
|
|
|
|
2G |
|
. |
|
|
|
|
|
|
|
||||
S Cy без |
Cx без tg без |
|
|
|
|
SCy без |
||||
|
|
|
|
|
|
|
|
|||
Таким образом, на каждой высоте полета сущес твует |
||||||||||
определенный диапазон скоростей |
полета от Vmin до |
|||||||||
Vmax , внутри которого возможен установившийся гор и- зонтальный полет при соответствующей величине расп о- лагаемой тяги.
Точкам пересечения кривой располагаемой тяги с кривыми потребных тяг при  0 соответствуют скорости установившегося набора высоты с соответс твующими углами наклона траектории. Вертикальная с оставляющая скорости при установившемся наборе в ысоты с углом наклона траектории
0 соответствуют скорости установившегося набора высоты с соответс твующими углами наклона траектории. Вертикальная с оставляющая скорости при установившемся наборе в ысоты с углом наклона траектории  равна
равна
23
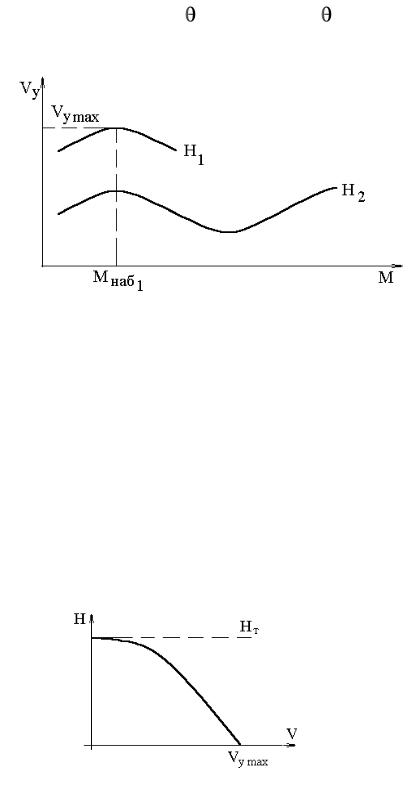
Vy = V sin = M aH sin .
Определив Vy для ряда значений  и построив графики
и построив графики
Рис. 2.3
Vy = Vy (M, H) или Vy = Vy (V, H) (рис. 2.3), определяют для каждой высоты максимальное значение вертикал ьной составляющей скорости Vy max и соответствующее ей наивыгоднейшее значение скорости (числа М) полета по траектории Vнаб (Мнаб ). В результате получают зависим о-
сти Vy max = Vy max (H) и Vнаб = Vнаб (H) или Мнаб =
Мнаб (H).
Имея зависимость Vy max (H) (рис. 2.4), можно определить наибольшую высоту , на которой еще во зможен
Рис. 2.4
установившийся полет самолета. Эта высота носит н азвание «статического» или теоретического потолка. На те о- ретическом потолке вертикальная составляющая ск орости Vy max = 0, поэтому на теоретическом потолке диапазон
24
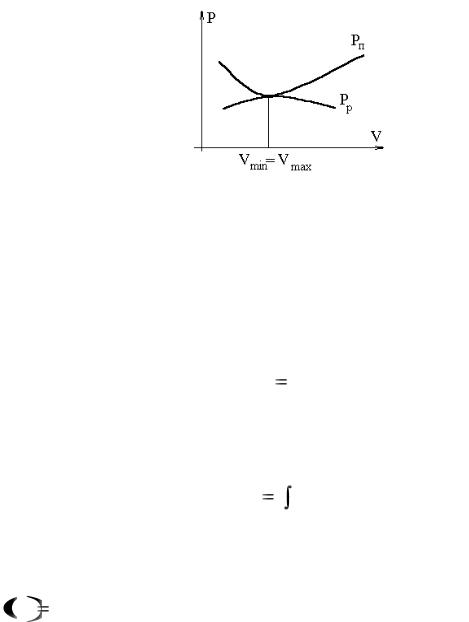
скоростей установившегося полета равен н улю, т.е. Vmi n
= V max .
Кривые потребных и располагаемых тяг для теор е- тического потолка имеют вид, изображенный на рис. 2.5.
|
|
|
Рис. 2.5 |
|
|
|
|
||
Время подъема |
на |
самолета |
на |
различные высоты |
|||||
можно определить следующим образом. |
|
|
|||||||
Пусть вертикальная составляющая скорости в н еко- |
|||||||||
торый |
момент времени |
равна Vy max . |
Тогда |
за |
время dt |
||||
самолет |
поднимется |
на высоту dH, так что |
|
|
|||||
|
|
|
dt |
dH |
. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Vy max |
|
|
|
|||
|
|
|
|
|
|
|
|
||
После |
интегрирования |
получим |
следу ющее |
|
выражение |
||||
для наименьшего времени подъема самолета |
на |
высоту |
|||||||
|
|
|
H |
dH |
. |
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
Vy max |
|
|
|
|||
|
|
|
0 |
|
|
|
|
||
Значение интеграла определяют обычно численно (гр а- фически), для чего строят график зависимости
f H |
1 |
(рис. 2.6) и определяют площадь, огр ани- |
|
|
|||
Vy max |
|||
|
|
25
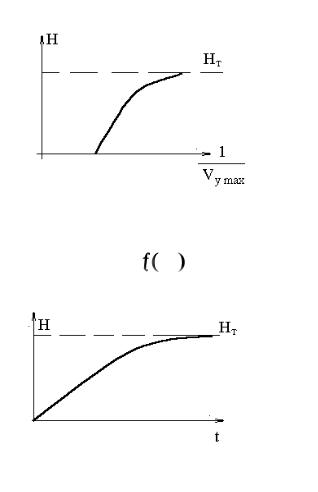
Рис. 2.6
ченную осью H и кривой H . В результате получают
Рис. 2.7
зависимость H (t) (рис. 2.7), которая называется бар ограммой подъема самолета. Так как по мере приближ ения к теоретическому потолку вертикальная соста вляющая скорости Vy max убывает до нуля, то время подъема на в ы- соту теоретического потолка получается бесконечно большим.
Поэтому, наряду с понятием теоретического (статич е- ского) потолка вводят понятие практического потолка, характеризуя его заранее выбранной верт икальной скоростью.
26
|
|
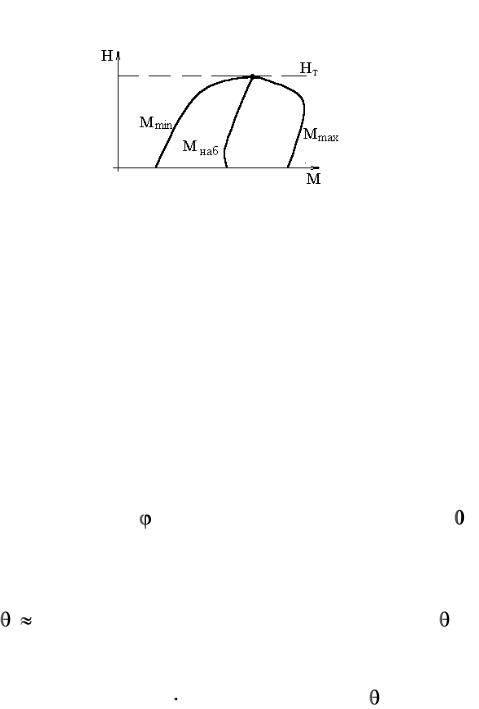
Рис. 2.8 |
|
|
|
Таким образом в результате аэродинамического ра с- |
|||
чета |
находят |
зависимости Мmax (H), Мmi n (H), |
Мнаб |
|
(H), |
Vy max (H), Hт, Hпр, H (t), tнаб типичный |
вид |
которых |
|
представлен на |
рис. 2.8. |
|
|
|
|
|
2.3. Упрощенный метод тяг |
|
|
|
Изложенный выше метод тяг основан |
на |
решении |
|
точных уравнений установившегося движения самолета. Если в этих уравнениях пренебречь сравнительно н е- большим углом  , т.е. принять, что
, т.е. принять, что 
 , то построение сетки потребных тяг значительно упрощ ается,
, то построение сетки потребных тяг значительно упрощ ается,
хотя схема расчета остается прежней. |
|
|
||
|
Метод |
тяг упрощается еще больше, если |
принять, |
|
что |
cos |
1, что допустимо при малых углах |
, т.е. при |
|
достаточно |
пологих траекториях. В этом |
случае уравн е- |
||
ния |
установившегося движения самолета |
прин имают вид: |
||
|
|
Pп = Cx S 0,7 pH M2 + G sin |
, |
|
Cy S  0,7 pH M2 = G .
0,7 pH M2 = G .
Из сравнения приближенных и точных уравнений дв ижения самолета видно, что при определении Cy по приближенному уравнению допускается погрешность по сравнению с его значением, удовлетворяющим точному уравнению.
Погрешность при определении Cy |
приводит |
к по- |
грешности в определени и той части Cx , |
которая |
зависит |
27 |
|
|
от величины Cy. Так как значение Cy, найденное по при-
ближенному уравнению |
получается несколько бол ьшим |
его истинного значения, |
то и величина лобового сопр о- |
тивления определяется с завышением, причем тем бол ь- шим, чем больше угол наклона траектории.
При |
дозвуковых скоростях полета, т.е. |
при числах |
M < M кр |
неточность в определении Cy сказывается на |
|
точность |
определения индуктивного сопротивления. |
|
При |
не очень малых скоростях пол ета |
индуктивное |
сопротивление составляет менее половины общего с опротивления самолета. Поэтому при дозвуковых скор остях полета допущение, что cos  1 не приводит к значительной погрешности в определении лобового с опротивления самолета, а значит и не приводит к зн ачительной погрешности при построении для этих ск оростей сетки потребных тяг.
1 не приводит к значительной погрешности в определении лобового с опротивления самолета, а значит и не приводит к зн ачительной погрешности при построении для этих ск оростей сетки потребных тяг.
При сверхзвуковых скоростях полета, когда от в еличины Cy зависит частично и волновое сопротивление, с о- ставляющее значительную долю в общем лобовом сопр о- тивлении самолета, неточность в определении Cy может
привести к заметной погрешности в |
значениях |
п отреб- |
||||
ной для этих скоростей полета тяги. |
|
|
|
|||
Итак, при сделанном допущении |
(cos |
1) |
следует, |
|||
что потребное значение Cy равно |
|
|
|
|
|
|
Сy |
G |
|
. |
|
|
|
|
|
|
|
|
||
0,7pHM2 |
|
|
|
|
||
|
S |
|
|
|
||
Из полученного соотношения видно, что потребное зн а-
чение Cy получается в этом |
случае не зависящим от у г- |
ла наклона траектории. Так |
как при фиксирова нном чис- |
ле M полета коэффициенты Cy и Cx однозначно связаны
через |
поляру |
самолета, то при сделанном д опущении |
(cos |
1) значение Cx также оказывается независящим от |
|
угла |
наклона |
траектории. |
Следовательно, в этом случае потребную тягу можно |
||
представить в |
виде: |
|
28
Pп = Cx гор S |
0,7 pH M2 + G sin |
|
= Pп гор + G sin . |
Таким образом, в упрощенном |
методе тяг потре бная |
||
для выполнения |
полета тяги равна |
сумме тяги, п отреб- |
|
ной для выполнения горизонтального установивш егося
полета, и |
|
слагаемого |
G sin . |
|
|
|
|
|
|
|
|||||||
|
Тягу, потребную |
для |
выполнения |
горизонтального |
|||||||||||||
полета |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Pп гор = Cx |
S |
0,7 pH M2 |
|
||||||||
можно представить в |
виде: |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
P |
|
|
G |
, |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
п гор |
K |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где |
K |
Сy |
|
- качество |
самолета. |
|
|
|
|||||||||
Сx |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Так |
как для |
установившегося |
полета |
Pп = Pр, то си- |
||||||||||||
нус |
угла |
наклона |
траектории равен: |
|
|
|
|||||||||||
|
|
|
|
|
|
sin |
|
Pр |
Pп гор |
P |
, |
|
|||||
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
G |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
P - |
избыточная тяга |
двигателей. |
|
|
||||||||||||
|
Так |
как Vy = V |
sin |
, |
то |
вертикальная составляющая |
|||||||||||
скорости в упрощенном методе тяг определяется раве н- ством
|
|
V |
|
P |
V |
N |
, |
|
|
|
|
|
|||
|
|
y |
G |
G |
|||
|
|
|
|
||||
где |
N - избыточная |
мощность |
двигателей. |
||||
Из последнего соотношения видно, что при избы тке |
|||||||
тяги ( |
P > 0) самолет |
будет подниматься, а при н едостат- |
|||||
ке ( |
P < 0) - снижаться. |
|
|
|
|
|
|
При пользовании |
|
упрощенным методом тяг целес о- |
|||||
образно вместо сетки потребных тяг строить сетку тяг, потребных для выполнения горизонтального полета. П о- следовательность расчета в этом случае такая. Для ка ж- дой высоты полета задаются рядом скоростей (чисел M) полета. Для каждого значения высоты и чи сла М (скорости) полета определяют значение Cy и по поляре самолета определяют Cx . Далее определяют тягу, потребную
29
для |
выполнения |
горизонтального полета, и строят сетки |
тяг, |
потребных |
для выполнения горизо нтального полета, |
на которую наносят сетку располага емых тяг (рис. 2.9). Пользуясь диаграммой потребных для гор и-
Рис. 2.9
зонтального полета и располагаемых тяг, определяют ле т- но - технические характеристики самолета так же, как это было изложено в предыдущем параграфе, при реш ении точных уравнений установившегося движения.
2.4. Режимы полета по диаграмме потребных и располагаемых тяг
Будем исходить из предпосылок упрощенного м етода тяг. В этом случае имеем, что скорость, потребная для полета на заданной высоте H при заданном значении Cy равна
|
V |
|
|
2G |
|
, |
|
|
|
|
|
|
|
||||
|
|
S Cy |
|
|
||||
|
|
|
|
|
|
|
|
|
т.е. в первом |
приближении |
потребная |
скорость |
полета |
||||
не зависит от |
тяги двигателя и угла |
наклона |
траект о- |
|||||
рии, а зависит от веса самолета и заданного значения коэффициента подъемной силы Cy.
Необходимым условием прямолинейного установи в- шегося полета является равновесие моментов внешних сил относительно центра тяжести самолета. Это усл овие осуществляется соответствующим отклонением руля в ы-
30
соты, так что каждому значению угла атаки |
бал |
соот- |
|||||||||||||||
ветствует определенный угол отклонения руля в ысоты |
в |
||||||||||||||||
бал. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так |
как Cy |
= Cy ( , |
М), |
то в |
первом |
приближении |
||||||||||
скорость полета будет зависеть только от |
угла отклоне- |
||||||||||||||||
ния |
руля |
высоты. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Итак, заданному значению коэффициента подъемной |
||||||||||||||||
силы Cy соответствует вполне |
определенная |
скорость |
п о- |
||||||||||||||
лета, а стало быть и вполне определенное |
значение |
к о- |
|||||||||||||||
эффициента лобового сопротивления Cx и |
значит, |
каждо- |
|||||||||||||||
му |
значению Cy |
соответствует на заданной |
высоте |
пол е- |
|||||||||||||
та |
вполне определенная |
величина |
|
лобового |
сопр отивле- |
||||||||||||
ния |
самолета CxS |
V2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так |
как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
C |
S |
|
V2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
р |
x |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
то в первом приближении величина угла наклона тр аек-
тории |
определяется величиной |
избыточной |
тяги, к оторая |
зависит от угла отклонения дросселя. |
|
||
Рассмотрим теперь диаграмму потребных и расп ола- |
|||
гаемых |
для горизонтального |
полета тяг |
(рис. 2.9). Все |
точки, лежащие на кривых тяг, потребных доля г оризонтального полета, изображают различные устан овившиеся режимы горизонтального полета на разных высотах. Эти режимы, соответствующие различным углам атаки, можно осуществить, изменяя тягу двигателей так, чтобы она всегда равнялась по величине потребной для гор изонтального полета силе тяги. При этом каждому р ежиму полета будет соответствовать свое положение руля в ы- соты, необходимое для обеспечения нужного угла атаки, соответствующего той или иной скорости горизонтал ьного полета.
31
Точкам, лежащим на кривых располагаемой тяги, с о- ответствуют режимы максимальной скороподъемности самолета при соответствующих скоростях п олета.
Точки лежащие выше |
кривой Pр, правее Mmax и ле- |
вее Mmi n теоретически не имеют физического смысла. |
|
Точкам, лежащим ниже |
Pп гор соответствуют различ- |
ные режимы снижения самолета. Причем точкам, леж а- щим ниже оси абсцисс, соответствуют отрицател ьные величины тяги, которые получаются дросселиров анием и реверсированием двигателя.
Точкам, лежащим между кривыми располагаемых и потребных тяг, соответствуют режимы подъема самол ета при различной степени дросселирования.
Рассмотрим примеры
Самолет летит горизонтально со скоростью V1 . Это значит, что отклонением руля высоты самолету задан угол
атаки |
1 обеспечивается равенство |
Y = G, и |
дросселиро- |
|||
ванием двигателя тяга уменьшена до потребной. |
||||||
1) Дальше, летчик, не меняя положения дросселя, ув е- |
||||||
личил угол атаки |
1 |
отклонив руль высоты. Какой будет |
||||
последующий установившийся режим (рис. 2.10)? |
||||||
Так |
как |
и, |
следовательно, Cy увеличились, то Y |
|||
будет |
больше |
G |
и |
траектория |
начнет |
искривляться |
вверх. С увеличением Cy увеличится и Cx и сила тяги Р станет недостаточной, кроме этого появится соста вляющая Gsin . В результате скорость начнет умен ьшаться, стремясь к некоторой скорости V2 , при которой траектория перестанет искривляться, но будет уже н аклонена к
32