

Методическое пособие 787
.pdfУстановка в цилиндрическое отверстие диска двух вкладышей 4 и 5 соответствующей толщины позволяет использовать устройство для балансировки карданных механизмов с различными значениями диаметров промежуточного вала. Изготовление диска из двух половин 2 и 3 позволяет осуществить клеммовое (фиксировано-винтовое) соединение [4,с.93]. Это соединение допускает установку диска с пробным грузом в любом положении по длине промежуточного вала карданного механизма непосредственно на собранной машине. Круговой паз в диске позволяет устанавливать пробный груз 1 в любом угловом положении по отношению к промежуточному валу карданного механизма.
Для проведения динамической балансировки карданного механизма приводные колеса мобильной машины разъединяют с опорной поверхностью этих колес. Для этого раму машины вывешивают над опорной поверхностью на опорах. Описываемое устройство устанавливают на промежуточный вал карданного механизма в плоскости В-В [1, фиг.2] и закрепляют винтом 8 ползун 7 и пробный груз 1. Затем при работающем двигателе машины измеряют виброскорость лапы коробки передач при номинальной частоте вращения коленчатого вала.
После остановки двигателя машины ослабляют затяжку винта 8, изменяют угловое положение пробного груза 1 с ползуном 7 на 90 градусов. Для этого перемещают ползун 7 по круговому пазу в диске и затем его закрепляют на диске винтом 8.
Для определения места установки и массы уравновешивающего груза в плоскости В- В [1, фиг.2] используют методику А.Г. Верте [5], выполняя построение [1, фиг. 4] и расчет.
Аналогичным образом определяют место установки и массу уравновешивающего груза в плоскости А-А промежуточного вала карданного механизма [1, фиг.2].
Устройство использовалось при динамической балансировке карданного механизма автогрейдера ДЗ-122А-6, изготовленного на Орловском ПО «Дормашина».
Выводы:
1.Описанное устройство позволяет реализовать предложенный авторами способ [1] динамической балансировки карданного механизма непосредственно на мобильной машине без демонтажа карданного механизма.
2.Устройство пригодно для балансировки карданных механизмов любых мобильных
машин.
Библиографический список
1.Пат. РФ №2109260, G01M 1/28. Способ динамической балансировки преимущественно карданного механизма машины.
2.Левитский Н.И. Колебания в механизмах: учебное пособие для втузов/
Н.И.Левитский. - М.: Наука, 1988.- 366 с.
3.Пат. РФ № 78312, G01M 1/28. Устройство для балансировки карданного вала.
4.Гузенков П.Г. Детали машин: учебное пособие для студентов вузов / П.Г.Гузенков.
–М.: Высш. шк., 1982 – 351 с.
5.Колесник Н.В. Устранение вибрации машин / Н.В. Колесник.– М.: Машгиз, 1960 –
320 с.
References
1.The patent RF №2109260, G01M 1/28. Way of dynamic balancing mainly of the universal joint directly on the maschine.
2.Levitscki N.I. Fluctuation in mechanisms: the manual for technical colleges / N.I. Levitscki.- M.: Science, 1988.- 366 pp.
230

При этом, необходимо определить также виброскорости колебаний пола для случаев, когда виброизоляторы установлены и когда они отсутствуют. Для этого определим силу энергетической установки, передаваемую на поворотную платформу экскаватора.
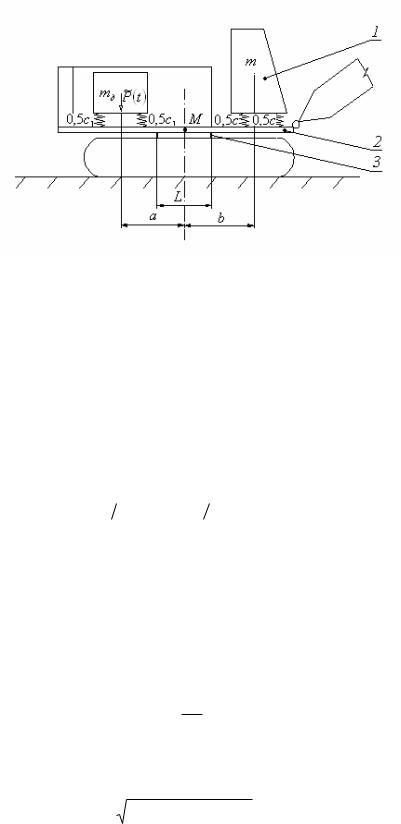
Расчетная схема колебательной системы представлена на рис. 1.
Рис. 1. Расчетная схема колебательной системы при кинематическом возбуждении (М>>m): 1 – пол кабины оператора; 2 – поворотная платформа экскаватора; 3 – опорный контур платформы
Общий вид уравнения движения источника возбуждения, рассматриваемого как твердое тело, имеет вид [1]:
. |
~ |
~ . |
(1) |
m y P(t) Q( y, y) |
|||
где m – колеблющаяся масса (масса защищаемого объекта-кабины), |
P(t) – переменная сила, |
||
Q – обобщённая (приведённая) реакция виброизолятора. |
|
||
Уравнение (1) приводится к линейному, если принять, что приведённая реакция виброизолятора Q складывается из приведённой силы упругости, линейно зависящей от перемещения, и приведённой силы трения, линейно зависящей от скорости.
|
~ |
|
|
|
. |
|
(2) |
|
Q( y, y) cy k y |
||||||
Вводя обозначения 2 |
c |
m |
д |
и 2 |
k m |
д |
, |
|
1 |
|
|
|
|
||
где с1 – приведённый коэффициент жёсткости виброизоляторов силового агрегата, mд - масса силовой установки, k - приведённый коэффициент сопротивления (коэффици-
ент демпфирования).
Приводим уравнение (1) к виду:
y |
2 |
y 2 y P(t) |
(3) |
||
.. |
|
. |
|
|
|
|
|
|
mд |
|
|
Допуская, что внешняя |
|
сила P(t) изменяется по |
гармоническому закону |
||
P~(t) H sin t , окончательно динамическое уравнение колебаний пола кабины имеет вид:
y 2 y 2 y H |
sin t |
(4) |
|
.. |
. |
|
|
mд
Решение данного уравнения для установившихся вынужденных колебаний, т.е. после затухания собственных колебаний, будет:
y |
|
H |
|
sin t |
(5) |
|
2 2 2 |
|
|||
|
mд |
4 2 2 |
|
||
где - сдвиг фаз силы и перемещения, определяемый выражением
232
|
|
|
|
tg |
|
2 |
|
|
|
|
|
|
|
|
(6) |
||||
|
|
|
|
2 2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Продифференцировав выражение (5), получим: |
|
|
|
|
|
|
|||||||||||||
|
. |
|
|
H |
|
|
|
|
|
|
|
cos t |
|
|
|||||
|
|
y |
|
|
|
|
|
|
|
|
|
|
(7) |
||||||
|
|
2 2 2 |
|
|
|
|
|
|
|
||||||||||
|
|
|
mд |
4 2 2 |
|
|
|
|
|
|
|||||||||
Подставляя y |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и y в равенство (2) получаем силу, передаваемую силовым агрегатом на |
|||||||||||||||||||
платформу через виброизолятор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
~ |
|
|
|
Hc1 |
|
|
|
|
|
|
|
|
|
|
k |
|
|
||
Q |
|
|
|
|
|
|
|
sin t |
|
|
|
cos t |
(8) |
||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
mд 2 |
|
|
|
|
|
|
|
|
|
|
|
|
c1 |
|
|
||
|
|
2 2 4 2 2 |
|
|
|
|
|
|
|
|
|||||||||
Необходимо отметить, что при к = 0, выражение (8) будет иметь вид: |
|
||||||||||||||||||
|
~ |
|
Hc1 |
|
|
sin t |
|
|
|
|
|||||||||
|
|
|
Q |
|
|
|
|
|
|
(9) |
|||||||||
|
|
|
mд 2 |
|
2 |
|
|
||||||||||||
здесь 0 , так как к = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При решении задачи о нахождении жёсткости виброизоляторов кабины принимаем |
|||||||||||||||||||
|
|
|
P(t) P0 sin t |
|
|
|
|
Hc1 |
|
|
sin t |
|
(10) |
||||||
|
|
|
mд |
2 2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
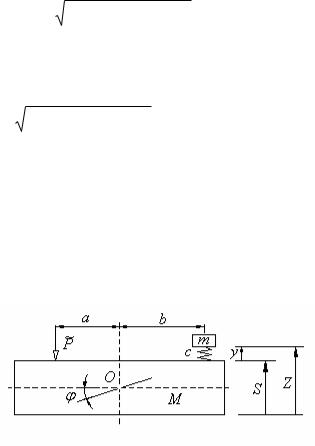
Рис. 2. Упрощённая расчётная схема колебательной системы
При решении задач колебаний в механизмах принимается, что реакция виброизолятора приводится к силе упругости, линейно зависящей от перемещения у. В этом случае уравнение движения (1) массы m при колебаниях основания имеет вид:
.. .. |
|
cy |
.. |
.. |
(11) |
m y S(t) |
или m y m S(t) cy |
||||
|
|
|
|
|
|
При этом необходимо учитывать, что смещение S основания платформы в случае принятой схемы нецентрального приложения силы P будет содержать две составляющие.
S(t) S1 (t) S2 (t) |
(12) |
гдеS1 (t) - вертикальное смещение основания как твёрдого тела, вызванное действием в этом
направлении силы Р (рис. 3, а), S2(t) - смещение, соответствующее углу φ поворота основания как твёрдого тела вокруг центра масс, вызванное нецентральным приложением силы Р,
S2 btg (рис. 3, б).
233



|
|
|
P0 |
|
1 |
|
|
ab |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
M |
|
I |
|
|
||||||||
c m |
2 |
|
|
|
|
|
|
|
|
|
|
(27) |
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
. |
|
|
|
1 |
|
|
ab |
1 |
|||||
|
|
|
|
|
|
|
|
|||||||
|
|
Z P0 |
|
|
|
|
|
|
|
|
||||
|
|
|
M |
|
I |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Полученное значение с является требуемой жесткостью виброизолятора на рабочем режиме.
Если виброизоляторы пола отсутствуют, как на машинах в штатной комплектации, то виброскорость пола пульта управления определяется по формуле (26) при cosωt = 1. В этом случае
|
. |
P |
|
1 |
|
ab |
|
|
|
Z |
0 |
|
|
|
|
|
(28) |
|
|
M |
I |
|||||
. |
|
|
|
|
|
|||
2 м с |
|
|
|
|
|
|
|
|
В наших условиях Z 5,8*10 |
|
|
|
|
|
|
|
|
Подставив полученное значение виброскорости в выражение (28), жесткость виброизолятора будет равна c 57,7 кН м.
м.
На основании выше изложенного можно сделать следующие выводы:
1.Установлены взаимосвязи жесткости в опорных связях кабины и виброскорости пола кабины с физико-геометрическими параметрами экскаватора.
2.При отсутствии виброизоляторов кабины виброскорость пола превышает нормативное значение более чем в пять раз.
3.На ранней стадии проектирования экскаваторов рационально воспользоваться полученными зависимостями для расчета жесткости в опорных связях кабины.
Библиографический список
1.Левицкий Н.И. Колебания в механизмах. М: Наука. - 1988. - 336 с.
2.Вейн В.П., Кочура А.Е. Динамика машинных агрегатов с двигателями внутреннего сгорания. - Л.: Машиностроение, 1976. – 25 с.
References
1.Levitskii N.I. Vbrations in mechanisms.M.: Nauka,-1988.-P.336
2.Vein V.P., Kochura A.E. Dinamics of Machine assemblies with internal comdustion engine.-L.: Machine building, 1976.-P.25
236

плотностей и большей глубины уплотнения материалов различных типов за меньшее число проходов по одному месту в сравнении со статическим уплотнением. Этим и объясняется большая эффективность и экономичность использования вибрационного оборудования. Но следует отметить, что в зависимости от вида уплотняемого материала и степени уплотнения его после каждого прохода, необходимо устанавливать наиболее подходящую частоту рабочего органа. Это часто делается за счет применения в трансмиссии гидронасосов и гидромоторов с переменной производительностью.
Влияние частоты и амплитуды рабочего органа на уплотняемый материал было предметом дискуссий долгие годы. Лабораторные и полевые исследования показывают, что частота в диапазоне 25...50 Гц соответствует максимальному уплотняющему эффекту на грунтах. На асфальтобетонных смесях наилучшие результаты были получены в диапазоне частот
50...70 Гц [2].
Больший эффект на уплотнение материала оказывает амплитуда колебаний рабочего органа. Рекомендуется для грунтов отсыпаемых толстыми слоями (0,3...0,4м) устанавливать амплитуду не менее 1,6 мм, асфальтобетона – 1мм [2].
В России большое распространение имеют виброкатки ЗAO «Раскат» с изменяемой частотой вибровальца 40 и 50 Гц. Вибрация вальца может отключаться, тогда каток работает как статический. Таким образом, в зависимости от вида уплотняемого материала и степени его уплотнения виброкаток может работать в трёх режимах: с частотой вибрации вальца 40 Гц, или 50 Гц, или без вибрации вальца. В этой связи актуальной задачей является обеспечение защиты водителя от воздействия вибрации, проникающей в пол кабины через опорные связи её с рамой, так как жесткость резиновых упругих элементов (виброизоляторов кабины) расчитана только на одну определённую частоту.
С целью оценки влияния режима работы вибровальца на вибрацию пола кабины проведен экспериментальные исследования на виброкатке типа ДУ-99, находящегося в эксплуатации менее года. Опыты проводились в реальных условиях при уплотнении супесчанного грунта и щебня при реконструкции автодороги. Для измерения и регистрации параметров вибрации применялся прибор – виброметр «Октава – 101ВМ» с тремя акселерометрами типа АР98-100. Акселерометры устанавливались на бугель вибровальца у шарнира, соединяющего бугель с рамой, на раме виброкатка под кабиной с левой стороны и на полу кабины, также с левой стороны. Измерения производились в трех направлениях: вдоль провольной оси виброкатка, в поперечном и вертикальном. Наибольшие значения амплитуд виброускорений отмечены в вертикальном направлении. Данные измерений вибрации при уплотнении супесчанного грунта при различных режимах работы вибровальца представлены в табл. 1...3, где также расчетным путём получены значения коэффициента передачи вибрации по ускорению от рамы к полу кабины (Ka) и критерий эффективности виброизоляции ВИ. При этом использовались общеизвестные формулы:
Ka ak / ap ; ВИ 10.lg(Vж2 / Vр2 ) ,
где ak, ap – соответственно ускорения пола кабины и рамы виброкатка; Vж,Vp – соответственно виброскорости при жестком креплении кабины к раме и через виброизоляторы.
В табл. 1-3 в строках с обозначениями I и II представлены значения параметров вибрации на полу кабины и раме виброкатка соответственно. В табл. 3 представлены данные вибрации на полу кабины и раме при отключенном вибраторе вибровальца, но дизельный двигатель, гидронасосы и гидромоторы передвижения катка работают в номинальном режиме.
По аналогичной методике получены значения параметров вибрации элементов виброкатка при работе на щебне (табл. 4-6).
238
Таблица 1
Значения параметров вибрации при уплотнении супесчанного грунта и частоте колебаний вибровальца 40 Гц
1/3-октавный |
Вибро- |
Вибро- |
Вибро- |
|
Вибро- |
|
Коэфф. |
|
Вибро- |
|
|||||
спектр |
|
ускорение |
ускорение |
скорость |
|
скорость |
|
передачи |
|
изоляция |
|
||||
частот |
|
La, дБ |
а, м/с2 |
Lv, дБ |
|
V, м/с |
|
Кa |
|
ВИ |
|
||||
25 |
|
I |
124,2 |
|
1,6218101 |
|
106,4 |
|
0,0104 |
|
0,6309573 |
|
4,1655188 |
|
|
|
II |
128,2 |
|
2,5703958 |
|
110,4 |
|
0,0168 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
31,5 |
|
I |
129,5 |
|
2,9853826 |
|
109,7 |
|
0,0154 |
|
0,9015711 |
|
0,9601545 |
|
|
|
II |
130,4 |
|
3,3113112 |
|
110,6 |
|
0,0172 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
40 |
|
I |
135,7 |
|
6,095369 |
|
113,9 |
|
0,0247 |
|
0,7762471 |
|
2,3301114 |
|
|
|
II |
137,9 |
|
7,8523563 |
|
116,1 |
|
0,0323 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
50 |
|
I |
126 |
|
1,9952623 |
|
102,1 |
|
0,00638 |
|
1,023293 |
|
|
-0,206653 |
|
|
II |
125,8 |
|
1,9498446 |
|
101,9 |
|
0,00623 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
63 |
|
I |
134,8 |
|
5,4954087 |
|
108,9 |
|
0,0139 |
|
0,9120108 |
|
0,8901184 |
|
|
|
II |
135,6 |
|
6,0255959 |
|
109,7 |
|
0,0154 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
80 |
|
I |
137,9 |
|
7,8523563 |
|
110 |
|
0,0595 |
|
0,7943282 |
|
1,236143 |
|
|
|
II |
139,9 |
|
9,8855309 |
|
112 |
|
0,0686 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
100 |
|
I |
130,9 |
|
3,5075187 |
|
101 |
|
0,0056 |
|
1,7378008 |
|
-4,699409 |
|
|
|
II |
126,1 |
|
2,0183664 |
|
96,2 |
|
0,00326 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
125 |
|
I |
131,4 |
|
3,7153523 |
|
99,5 |
|
0,00475 |
|
1,6218101 |
|
-4,226215 |
|
|
|
II |
127,2 |
|
2,2908677 |
|
95,3 |
|
0,00292 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
160 |
|
I |
139,1 |
|
9,0157114 |
|
105,2 |
|
0,00912 |
|
1,6595869 |
|
-4,424286 |
|
|
|
II |
134,7 |
|
5,4325033 |
|
100,8 |
|
0,00548 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
|
|
Значения параметров вибрации при уплотнении супесчанного грунта |
||||||||||||||
|
|
|
и частоте колебаний вибровальца 50 Гц |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/3-октавный |
Вибро- |
|
Вибро- |
|
Вибро- |
|
Вибро- |
|
Коэфф. |
|
|
Вибро- |
|||
спектр |
|
ускорение |
|
ускорение |
|
скорость |
скорость |
передачи |
|
|
изоляция |
|
|||
частот |
|
La, дБ |
|
а, м/с2 |
|
Lv, дБ |
|
V, м/с |
|
Кa |
|
|
ВИ |
|
|
25 |
|
I |
102,7 |
|
0,1364583 |
|
84,9 |
0,00088 |
0,5248075 |
|
5,719325 |
|
|||
|
II |
108,3 |
|
0,260016 |
|
90,5 |
0,0017 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
31,5 |
|
I |
112,8 |
|
0,4365158 |
|
93 |
0,0022 |
0,7585776 |
|
2,5773806 |
|
|||
|
II |
115,2 |
|
0,5754399 |
|
95,4 |
0,00296 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
40 |
|
I |
128,3 |
|
2,6001596 |
|
106,5 |
0,0105 |
0,7673615 |
|
2,3737957 |
|
|||
|
II |
130,6 |
|
3,3884416 |
|
108,8 |
0,0138 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
50 |
|
I |
135 |
|
5,6234133 |
|
111,1 |
0,0182 |
0,7943282 |
|
1,7646695 |
|
|||
|
II |
137 |
|
7,0794578 |
|
113,1 |
0,0223 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
63 |
|
I |
135,8 |
|
6,16595 |
|
109,9 |
0,0158 |
0,9015711 |
|
0,9371116 |
|
|||
|
II |
136,7 |
|
6,8391165 |
|
110,8 |
0,0176 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
80 |
|
I |
137,4 |
|
7,4131024 |
|
109,5 |
0,075 |
0,8413951 |
|
1,3884282 |
|
|||
|
II |
138,9 |
|
8,8104887 |
|
111 |
0,088 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
100 |
|
I |
133,2 |
|
4,5708819 |
|
103,3 |
0,00734 |
1,3963684 |
|
-2,9272955 |
|
|||
|
II |
130,3 |
|
3,2734069 |
|
100,4 |
0,00524 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
125 |
|
I |
137,5 |
|
7,4989421 |
|
105,6 |
0,00956 |
1,7782794 |
|
-5,0258621 |
|
|||
|
II |
132,5 |
|
4,216965 |
|
100,6 |
0,00536 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
160 |
|
I |
139,8 |
|
9,7723722 |
|
105,9 |
0,00989 |
1,8836491 |
|
-5,5173001 |
|
|||
|
II |
134,3 |
|
5,1880004 |
|
100,4 |
0,00524 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
239 |
|
|
|
|
|
|
|
|