

4.6.3. Сегментные шпонки
В связи с ослаблением вала шпоночным пазом под сегментную шпонку, такие шпонки применяют для передачи относительно небольших моментов, их отличает устойчивое положение в соединении.
Так же, как и призматические, сегментные шпонки (рис. 62) рассчитываются на смятие:
![]() ;
;
и на срез:
![]() ;
;

рис. 62. Соединение сегментной шпонкой
Примеры обозначений шпоночных соединений:
Вид соединения |
Обозначение |
1. Призматическая шпонка со скругленными торцами |
ШПОНКА 18×11×100 ГОСТ 23360-70 |
2. Призматическая шпонка с плоскими торцами |
ШПОНКА 2-18×11×100 ГОСТ 23360-70 |
3. Шпонка сегментная |
ШПОНКА сегм. 6×10 ГОСТ 24071-80 |
Клиновые шпонки в отличие от призматических ставятся с зазором по боковым граням. Клиновые шпонки создают напряжённое соединение, способное передавать не только Мкр, но и осевое усилие. Однако эти шпонки вызывают радиальное смещение оси ступицы на величину посадочного зазора и контактных деформаций. Это увеличивает биение насажанной детали. Применение клиновых шпонок резко сократилось. Достоинством является отсутствие зазоров и поэтому хорошее восприятие радиальных нагрузок.
Для упрощения расчёта принимают, что при передачи момента Мкр напряжения смятия по ширине поверхности контакта рабочих граней шпонки с валом и ступицей распределяются по закону треугольника. В этом случае передаваемый крутящий момент складывается из:
а) момента нормальной силы давления N между ступицей и шпонкой;
б) момента силы трения Nq между ступицей и валом;
в) момента силы трения
![]() между ступицей и валом.
между ступицей и валом.
4.6.4. Конструкция и расчет шлицевых соединений
Соединение ступицы с валом вместо шпонки может осуществляться с помощью шлицов. Такое соединение ступицы с валом называется зубчатым или шлицевым.
В зависимости от формы профиля зубьев различают соединения с прямобочными, эвольвентными и треугольными зубьями (шлицами) (рис. 63).
Достоинства шлицевых соединений:
а) возможность передачи больших моментов благодаря значительно большей поверхности контакта соединяемых деталей и более равномерному распределению давления по этой поверхности;
б) более точное центрирование ступицы по валу;
в) лучшее направление при перемещении ступицы по валу;
г) большая прочность вала.
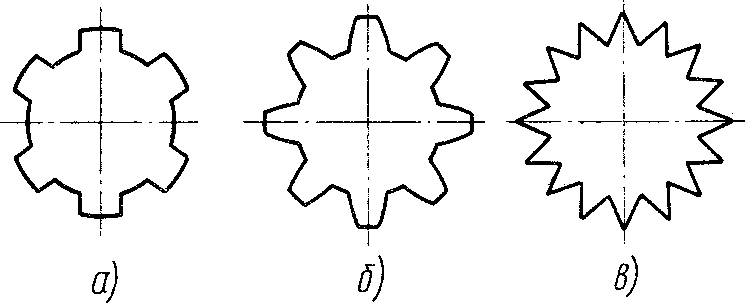
рис. 63. Основные типы зубчатых
(шлицевых) соединений:
а – прямобочное;
б – эвольвентное;
в – треугольное.
Прямобочные (ГОСТ 1139-80) шлицевое соединение наиболее распространено. Соединение выполняется с центрированием ступицы: по боковым сторонам зубьев в, по наружному диаметру D, по внутреннему диаметру d (рис. 64).
Центрирование по “ ” (рис. 64 в) не обеспечивает точной соосности ступицы и вала. Поэтому его рекомендуют при передачи больших моментов. Центрирование по “D” и “d” применяется, когда требуется точность совпадения осей соединяемых деталей (рис. 64 а, б).
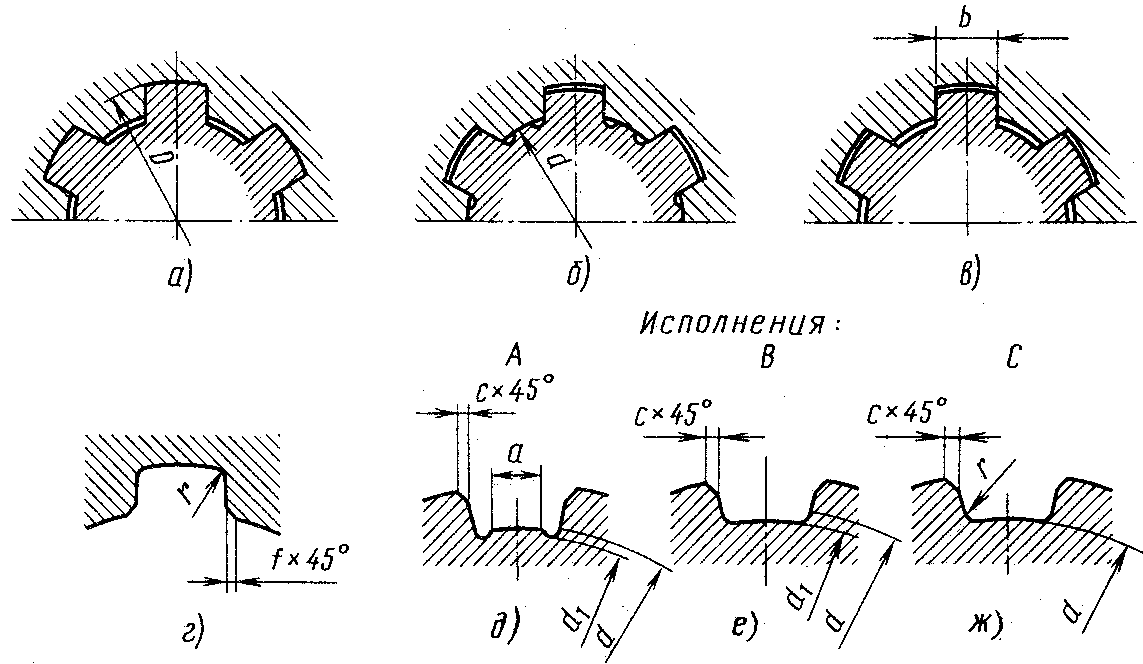
рис. 64. Виды центрирования прямобочных зубчатых соединений:
а – по боковым граням;
б – по наружному диаметру;
в – внутреннему диаметру;
г – форма сечения ступицы;
д, е – форма сечений вала исполнений б, в
Эвольвентное шлицевое различают с центрированием ступицы по боковым сторонам “S” (рис. а) и по наружному диаметру “D” (рис. б). Центрирование по “S” наиболее распространено.
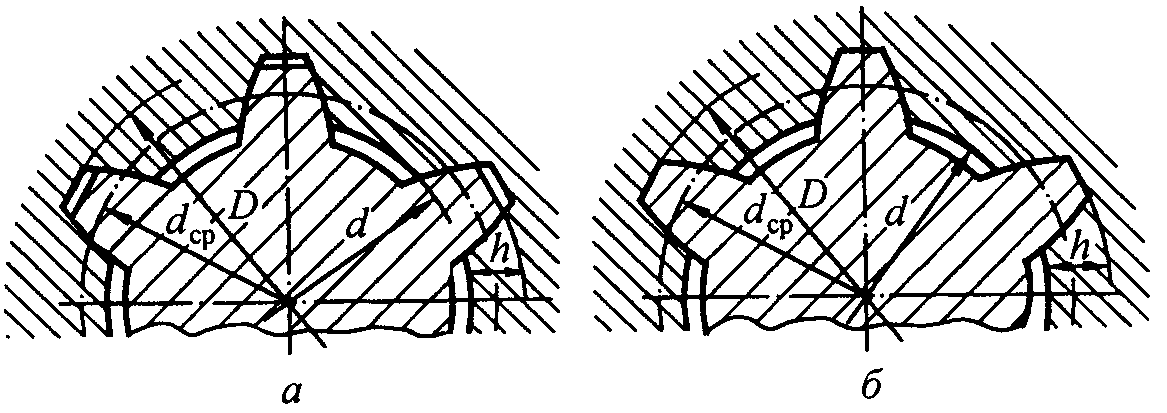
рис. 65. Эвольвентное зубчатое зацепление:
а – центрирование по боковым граням;
б – центрирование по наружному диаметру.
Достоинства эвольвентных шлицевых соединений:
- более высокая прочность зубьев, вследствие их утолщения к основанию;
- высокая технологичность и более низкая стоимость изготовления шлицевых валов.
Вследствие высокой стоимости протяжек для изготовления шлицев в ступицах малых и средних размеров – эвольвентные шлицевые соединения применяются реже прямобочных.
Треугольное зубчатое соединение применяется только в качестве неподвижного при передаче небольших моментов. Центрирование такого соединения осуществляется только по боковым граням. Применяются также конические шлицевые соединения (конусность 1:16).
Число Z и размеры шлицев принимаются в зависимости от диаметра вала по соответствующему ГОСТ. Длина зубьев определяется длиной ступицы, а если ступица подвижная – величиной хода её перемещения.
Расчёт шлицевых соединений производится обычно как проверочный.
Шлицевые соединения рассчитываются на смятие по формуле:
![]() ,
,
где σсм – расчётное напряжение смятия на рабочих поверхностях шлицев;
М– передаваемый момент;
dc – средний диаметр шлицевого соединения;
Z – число шлиц;
h – высота поверхности контакта шлицев, принимаемая равной длине ступицы;
ψ – коэффициент, учитывающий неравномерность распределения нагрузки между шлицами, принимаемый равным 0,7…0,8;
[σ]см – допускаемое напряжение смятия для рабочих поверхностей шлицев.
Размеры dc и h определяют из выражений: прямозубных шлицев:
![]() ;
;
![]() ;
;
Для шлицев эвольвентного профиля с центрированием по S:
dc = dд = mz и h = m = dд/z;
где dд – диаметр делительной окружности;
m – модуль закрепления;
Для шлицев
эвольвентного профиля с центрированием
по
![]() :
:
dc = dд = mz и h = 0,9m = 0,9 dд/z;
Для шлицев треугольного профиля:
dc = dд = mz и h = [D – da];
Допускаемое напряжение на смятие [σ]см для шлицевого соединения при среднем режиме работы можно принимать: для неподвижного с термической обработкой шлицев [σ]см = 100…140 МПа и без термической обработки [σ]см = 60…100 МПа.
При лёгком режиме работы значение этих напряжений можно увеличить на 20…40%, а при тяжелом режиме их необходимо снизить на 30…50%.