Пример 4.3. Определим энтропию объекта, состояния которого (значения х) подчиняются закону нормального распределения (рис. 4.7, а). С учетом плотности распределения х, заданной выражением
f (x) = |
|
1 |
|
e− |
(x−x )2 |
|
σ |
|
2 σ2 |
, |
|
2 π |
|
|
|
|
энтропия (4.30) принимает следующий вид: |
|
|
H (S )= M [log2 (σ 2 π)]+ M |
(x − x)2 |
log2e −log2 x . |
|
|
|
|
2 σ2 |
|
|
|
|
|
|
|
Поскольку |
M [(x − x)2 ]= σ2 , |
|
|
|
|
|
|
H (S )= M [log2 |
(σ 2 π)]+ |
1 log2e −log2 |
|
σ |
|
|
. |
|
x = log2 |
2 πe |
(4.31) |
|
|
|
|
|
2 |
|
|
x |
|
Отметим, что энтропия в данном случае не зависит от среднего значения параметра x и определяется отношением σ x .
x .
Пример 4.4. Определим энтропию объекта, состояния которого равновероятны на участке a ≤ x ≤ b (рис. 4.7, б). В этом случае
|
1 |
, a ≤ x ≤ b, |
f (x)= |
|
b − a |
|
0 , x < a, x > b . |
|
|
|
|
Из формулы (4.29) получаем: |
|
|
|
H (S ) = b |
1 |
log2 (b − a)d x − log2 |
x = log2 |
b – a |
. (4.32) |
|
x |
∫ b − a |
|
|
|
a |
|
|
|
|
|
4.3.3. Определение количества информации по результатам диагностирования
Поясним количество информации, получаемой при диагностировании, на следующем примере. Объект находится в одном из двух равновероятных состояний – работоспособном или неработоспо-
2
собном, т. е. Р1 = Р2 = 0,5; ∑Pi = 1. Допустим также, что работо-
i=1
способность объекта оценивается по двум параметрам – температуре и давлению. Известно, что при поступлении сообщения от датчика температуры об изменении температуры менее чем на 40 ºС объект находится в работоспособном состоянии с вероятностью Р = 0,5. При поступлении сообщения от датчика давления о том, что оно больше 0,15 МПа, можно с вероятностью Р = 1 гарантировать работоспособное состояние объекта. Какое из этих сообщений несет больше информации? Очевидно, второе, т. к. оно полностью устраняет неопределенность состояния объекта. Подобные соображения позволяют определить величину информации как разность неопределенностей (энтропий) объекта до и после диагностирования.
Если начальная энтропия объекта равна H (S ), а после диагностирования она составляет H (S ), то информация J, полученная в результате диагностирования, равна
J = H (S )− H (S ). |
(4.33) |
В приведенном примере начальная энтропия объекта
|
1 |
log2 |
1 |
+ |
1 |
log2 |
1 |
|
= 1 бит. |
H (S )= − |
2 |
2 |
2 |
2 |
|
|
|
|
|
|
|
После получения сообщения от датчика температуры вероятности состояний стали P1 = P2 = 0,5, и энтропия объекта
|
1 |
log2 |
1 |
+ |
1 |
log2 |
1 |
|
=1 бит. |
H (S )= − |
2 |
2 |
2 |
2 |
|
|
|
|
|
|
|
Информация, |
полученная в |
результате |
диагностирования, |
J = H (S )− H (S )=1−1 = 0 бит. После получения сообщения от дат- |
чика давления вероятности состояний стали |
P =1, P = 0 , и эн- |
|
|
|
|
1 |
2 |
тропия |
объекта H (S )= −(1 log2 1+ 0 log2 0)= 0 бит, |
т.е. инфор- |
мация, |
полученная |
в результате |
диагностирования, |
J = H (S )− |
− H (S )=1−0 =1 бит. |
|
|
|
Рассмотрим влияние точности измерения на количество получаемой информации. Пусть параметр Х измеряется с точностью ε,
|
|
|
|
|
|
|
|
|
|
которая, в свою очередь, определяется шагом квантования |
x . Из- |
вестно, что до |
измерения |
параметр |
Х |
находился |
в |
интервале |
0 ≤ X ≤ x . |
Энтропия |
такого |
состояния в |
соответствии |
с |
форму- |
лой (4.32) |
H (S )= log2 x ε . После измерения с точностью ε уста- |
новлено, |
что |
значения параметра |
Х |
находятся |
в |
интервале |
( [0, x]). Энтропия второго состояния (после измерения) опре- |
деляется выражением |
H (S)= log2 |
ε. Информация, полученная |
в результате измерения, H (S )− H (S ) = log2 x ε − log2 |
ε = log2 x . |
Таким образом, если в результате диагностирования достоверно известно, что измеряемый параметр находится в интервале (точность определения измеряемой величины), то количество полученной информации возрастает с уменьшением погрешности измеряемого параметра.
Контрольные вопросы к главе 4
1.Датьопределениеосновныхпонятийтехническойдиагностики.
2.Какова цель технического диагностирования?
3.Перечислитьосновныезадачитехническогодиагностирования.
4.Какова структура системы технического диагностирования?
5.Пояснить сущность логических основ технического диагностирования.
6.Пояснить сущность вероятностных основ технического диагностирования.
7.Что такое энтропия объекта, в чем она измеряется?
8.Определить энтропию объекта с дискретным распределением состояний.
9.Перечислить свойства энтропии объекта.
10.Определить энтропию объекта с непрерывным распределением состояний.
5.ДИАГНОСТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ
5.1.Общие сведения о диагностических моделях объектов
Любой объект до проведения диагностирования характеризуется некоторой степенью неопределенности состояния. Цель диагностирования − устранить имеющуюся неопределенность, т.е. выяснить с заданной глубиной и полнотой истинное состояние объекта.
С целью использования математических методов анализа и оптимизации процесса получения информации о состоянии объекта
исокращения затрат на получение этой информации на этапе про-
ектирования строится диагностическая модель объекта. Диагностическая модель − это формализованное описание объ-
екта, необходимое для решения задач диагностирования. Диагно-
стическая модель может быть задана в явном или неявном виде. Явная модель − это совокупность формальных описаний исправного
иработоспособного объекта и всех его неисправных и неработоспособных состояний. Неявная модель представляет собой какое-либо одно формальное описание объекта, математические модели его физических неисправностей и правила получения по этим данным всех описаний, характеризующих другие состояния. Например, задается математическая модель исправного объекта, по которой строятся модели неисправных состояний.
По методам представления взаимосвязей между состоянием объекта, его элементами и параметрами диагностические модели подразделяются на непрерывные, дискретные и гибридные.
Непрерывные модели представляют объект и протекающие в нем процессы в непрерывно изменяющемся времени, которое является аргументом определенных функций. Непрерывные диагностические модели − это по большей части алгебраические или дифференциальные линейные и нелинейные уравнения, включая передаточные функции.
Дискретные модели определяют состояние объектов для последовательности дискретных значений времени, как правило, без учета характера протекающих в промежутках процессов; эти модели представляются конечно-разностными уравнениями или конечными автоматами и используются для описания цифровых и импульсных устройств.
Гибридные модели описывают объекты, в состав которых входят как блоки непрерывного действия (аналоговые устройства), так и блоки преобразования дискретной информации (дискретные устройства).
По способам задания диагностические модели подразделяются на следующие группы:
•аналитические, выраженные явной математической зависимостью диагностических параметров от внутренних характеристик
ипараметров объекта;
•функциональные, представленные графическим или графоаналитическим описанием объекта посредством функционально связанных блоков или типовых элементов;
•логические, описанные логическими выражениями, например средствами булевой алгебры, поведения и условий функционирования объектов, составленные с учетом входных воздействий и возможных вариантов состояний объекта;
•информационные, в которых состояние или процессы в объекте определяются методами теории информации.
Наибольшее распространение на практике получили аналитические, функциональные и логические модели объектов диагностирования.
5.2. Аналитические модели объектов диагностирования
Аналитическими моделями являются различные функции, связывающие между собой измеряемые диагностические параметры объекта с параметрами блоков или элементов, входящих в состав объекта. Аналитическая модель объекта задается в общем виде исходя из следующих соображений. В основе функционирования технических объектов лежат различные виды преобразования информации. В качестве физических носителей информации выступают сигналы, возбуждающие объект (входные сигналы), а также сигналы, характеризующие состояние возбужденного объекта (выходные сигналы). Предполагается, что объект задан как преобразователь информации, если известен его оператор W (рис. 5.1), отображающий закон преобразования входного сигнала X(t) в выходной сигнал Y(t). Стрелкой указано направление потока преобразуемой объектом информации. Полюса 1 и 2 являются входом и выходом и служат для информационной связи объекта с внешней средой.
Рис. 5.2. Расчетная схема
|
X(t) |
|
Y(t) = W {X(t)} |
|
W |
|
1 |
2 |
|
|
|
|
|
|
|
Рис. 5.1. Объект диагностирования как преобразователь сигналов |
Исходя из представленной схемы преобразования информации,
аналитическая модель объекта задается выражением |
|
Y (t)=W {X (t)}, |
(5.1) |
где X(t), Y(t) − векторы входного и выходного сигналов. В зависимости от полноты учета факторов, влияющих на техническое состояние объекта, оператор W может быть выражен дифференциальным уравнением или системой дифференциальных уравнений, передаточной функцией или функциональной зависимостью переменной Y от аргумента X. Если при оценке технического состояния объекта учитываются переходные процессы, возникающие при динамическом режиме работы, то оператор W задается одним или несколькими дифференциальными уравнениями либо передаточной функцией. Если влияние переходных процессов невелико, то оператор W вырождается в функциональную зависимость Y = f (X).
Пример 5.1. На рис. 5.2 показан объект, представляющий твердое тело массой М, опирающееся на пружину. Свобода движения тела ограничена неподвижными на-
правляющими так, что допускается только вертикальное поступательное перемещение. Приложенная
сила F(t) действует по вертикали.
Между телом и направляющими возникает вязкое трение, которое проявляется как сопротивление по-
ступательному движению. Составим уравнение движения объекта, применяя второй закон Ньютона:
|
M |
d2Y |
= F (t)−k Y − B |
d Y |
, |
(5.2) |
|
d t2 |
d t |
|
|
|
|
|
306
где Y − перемещение тела по вертикали от положения равновесия; kY − упругая сила пружины с коэффициентом жесткости k; BdY/dt − сила трения. Это уравнение является аналитической моделью объекта, представленной в форме дифференциального уравнения, и определяет взаимосвязь между действующей силой F(t) ≡ X(t) (входная величина) и перемещением Y(t) (выходная величина). В стационарном режиме работы, когда производные обращаются в нуль, уравнение (5.2) принимает вид
т. е. превращается в функциональную зависимость между силой и перемещением.
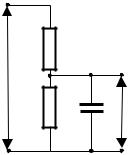
Пример 5.2. Объектом диагностирования является делитель напряжения (рис. 5.3). Уравнение, связывающее Uвых = Y(t) и Uвх = X(t), имеет вид
Y (t)+ |
R1 R2 |
C |
d Y (t) |
= |
|
R2 |
X (t). |
(5.4) |
|
d t |
R |
+ R |
|
R |
+ R |
|
|
|
|
|
1 |
2 |
|
|
|
1 |
2 |
|
|
При использовании операторной формы записи уравнение (5.4) принимает вид
|
|
|
|
|
|
Y = |
|
|
k2 |
X , |
|
|
|
|
|
|
|
1+ k P |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
где k |
= |
R1 R2 |
C |
; k |
2 |
= |
|
|
|
R2 |
|
; P = |
d |
. |
|
|
|
|
|
|
1 |
R1 + R2 |
|
|
|
|
|
R1 + R2 |
|
d t |
|
|
|
|
|
|
|
|
|
В |
данном |
примере |
|
|
аналитической |
моделью объекта является оператор |
|
|
W = |
|
k2 |
|
|
|
|
. |
(5.6) |
|
|
|
|
1+ k P |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
Если не учитывать переходные процессы, то W = k2, и уравнение (5.5) превращаетсявфункциональнуюзависимость
(5.5)
R1
UВХ
Рис. 5.3.
Схема делителя напряжений
|
Y = Uвых = |
|
R2 |
X. |
(5.7) |
|
R1 |
+ R2 |
|
|
|
|
|
Достоинствами аналитических |
моделей |
являются глубина |
и полнота описания. Однако при решении задач, связанных с обнаружением возникающих отказов, использование аналитических моделей объектов диагностирования связано с выполнением трудоемких и громоздких вычислений. Поэтому данный метод представления технических объектов имеет на практике ограниченное применение.
5.3. Функциональные модели объектов диагностирования
Функциональные модели, свободные от недостатков, присущих аналитическим моделям, дают одно из наиболее наглядных представлений объектов диагностирования и строятся на базе их функциональных схем. Функциональная модель − это графическое или графоаналитическое представление объекта посредством функционально связанных между собой сменных блоков или типовых элементов замены. При построении такой модели предполагается, что объект можно разделить на некоторое число связанных между собой функциональных блоков. Под функциональным блоком понимают часть объекта, которая может находиться в одном из двух несовместимых состояний (работоспособном или неработоспособном) и в работоспособном состоянии отвечает требуемой реакцией на определенную совокупность воздействий, в число которых могут входить реакции других блоков.
Воздействия, которые необходимо приложить к работоспособному блоку для получения требуемой (допустимой) реакции, называются допустимыми. Реакцию отказавшего блока называют недопустимой. В функциональной модели предполагается, что требуемая реакция любого блока может быть получена только в том случае, если все приложенные к нему воздействия являются допустимыми и блок работоспособен, а реакция отказавшего блока не зависит от приложенных к нему воздействий.
При построении функциональной модели объекта руководствуются следующими правилами:
1. Каждый блок объекта должен иметь только один выход Y, который может быть соединен с любым числом входов других
блоков. Число входов блока не ограничено. Вход i-го блока Xi называется внешним входом, если сигнал подается на этот вход извне. Этот же вход называется внутренним, если он является выходом
j-го блока Yj, т. е. если Xi=Yj.
2. Если входной (выходной) сигнал некоторого блока характеризуется несколькими параметрами, то каждый из них обозначается отдельным входом (выходом).
Пример 5.3. Пусть блок Б1 имеет два входных сигнала X1, X2 и один выходной сигнал Y1 (рис. 5.4, а), причем каждый из них характеризуется двумя физическими параметрами (амплитудой и длительностью импульса); тогда блок Б1 имеет четыре входа (X11, X12, X21, X22) и два выхода (Y11, Y12). Такая операция называется расщеплением сигналов по параметрам.
Поскольку в соответствии с правилом 1 каждый функциональный блок должен иметь один выход, блок Б1 разбивается на два блока с выходами Y11 и Y12 (рис. 5.4, в).
3.Выходы различных блоков не могут быть объединены.
4.Значение входа (выхода) блока допустимо, если значение соответствующего ему параметра принадлежит области допустимых значений. В этом случае принято обозначать значение входа (выхода) 1, иначе 0.
5.Блок считается неработоспособным, если все входные сигналы блока допустимы, а выходной сигнал недопустим.
6.Недопустимое значение хотя бы одного входного сигнала блока приводит к появлению недопустимого выходного сигнала.
|
|
|
|
Y1 |
X11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
Б1 |
|
|
|
|
|
|
|
X12 |
|
|
Б1 |
|
Y11 |
ампл. |
X2 |
|
|
|
|
|
|
|
|
|
|
X21 |
|
|
|
Y12 |
длит. |
|
|
|
|
|
|
|
|
|
|
|
|
X22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аб
X11 |
|
Y1 |
X12 |
|
|
|
|
|
|
|
|
ампл. |
|
|
|
длит. |
|
Y12 длит. |
|
|
|
|
X21 |
|
ампл. |
X22 |
|
|
|
|
|
|
|
|
|
|
|
длит. |
|
|
ампл. |
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
Рис. 5.4. Расщепление сигналов блока (а) по параметрам (б); представление блока подблоками (в)
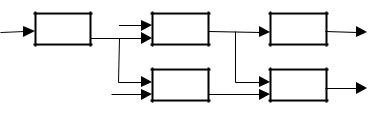
Графически функциональная модель объекта представляется схемой, в которой блоки обозначены прямоугольниками, соединенными линиями со стрелками на концах, указывающими направление прохождения сигналов, при этом блоки нумеруются слева направо и сверху вниз. Пример графического изображения схемы объекта показан на рис. 5.5. Эта схема содержит пять блоков с одним или двумя входами и одним выходом. Внешние воздействия (входные сигналы) обозначены X1, X2, X3, а реакции блоков (выходные сигналы) – Y1, ..., Y5, причем выходные сигналы Y1, Y2, Y3 являются входными сигналами для соответствующих блоков. В частности, выходной сигнал блока 1 является входным для блоков 2 и 3, а выходной сигнал блока 2 – входным сигналом для блоков 4 и 5.
Рис. 5.5. Графическое представление функциональной модели объекта
Располагая функциональной моделью объекта, можно не только проследить связи между блоками, но и определить все допустимые сигналы, которые необходимо приложить к работоспособному блоку для получения допустимого выходного сигнала. Так, например, для получения допустимого выходного сигнала блока 5 (см. рис. 5.5) следует приложить допустимые входные сигналы Y2, Y3, а для блока Y4 − сигнал Y2 . Информацию о состоянии объекта снимают с выходов блоков функциональной модели. Максимум информации можно получить в том случае, когда контролируются выходы всех блоков. Однако при решении задач проверки работоспособности и даже поиска места отказа в общем случае нет необходимости проверять все выходы блоков. Можно определить минимальное число выходов блоков модели, необходимых и достаточных для решения той или иной задачи диагностирования. Достигается это с помощью логических моделей объектов диагностирования.