

§ 2. Швидкість
Для характеристики руху матеріальної точки вводиться векторна величина - швидкість, якою визначається як швидкість руху, так і його напрям в даний момент часу.
Нехай матеріальна точка рухається по якій-небудь криволінійній траєкторії так, що у момент часу t їй відповідає радіус-вектор r0 (мал. 3). Впродовж малого проміжку часу t точка пройде шлях As і отримає елементарне (нескінченно мале) переміщення r.
Вектором середньої швидкості <v> називається відношення приросту r радіусу-вектору точки до проміжку часу t:
![]()
Напрям вектору середньої швидкості співпадає з напрямом r. При необмеженому зменшенні t середня швидкість прагне до граничного значення, яке називається миттєвою швидкістю v :
Миттєва швидкість v, таким чином, є векторна величина, рівна першій похідній радіус-вектора точки, що рухається, за часом. Оскільки січна в межі співпадає з дотичною, то вектор швидкості v спрямований по дотичній до траєкторії у бік руху (мал. 3). У міру зменшення t шлях s все більше наближатиметься до |r|, тому модуль миттєвої швидкості

Таким чином, модуль миттєвої швидкості дорівнює першій похідній шляху за часом:
![]()
При нерівномірному русі модуль миттєвої швидкості з часом змінюється. В даному випадку користуються скалярною величиною (v) - середньою швидкістю нерівномірного руху :
![]()
Якщо вираження ds = vdt (див. формулу (2.2)) проінтегрувати за часом в межах від t до t +t, то знайдемо довжину шляху, пройденого точкою за час t :

У разі рівномірного руху числове значення миттєвої швидкості постійне; тоді вираження (2.3) набере вигляду
Довжина шляху, пройденого точкою за проміжок часу від t1 до t2, дається інтегралом
§ 3. Прискорення та його складові
У разі нерівномірного руху важливо знати, як швидко змінюється швидкість з часом. Фізичною величиною, що характеризує швидкість зміни швидкості по модулю і напряму, являється прискорення.
Розглянемо плоский рух, т. е. таке, при якому усі ділянки траєкторії точки лежать в одній площині. Нехай вектор v задає швидкість точки А у момент часу t. За час t точка, що рухається, перейшла в положення В і придбала швидкість, відмінну від v як по модулю, так і напряму і рівну v1=V v.
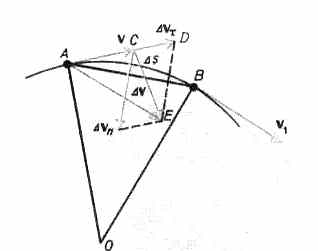
Перенесемо вектор v1 в точку А і знайдемо v (рис.4).
Середнім прискоренням нерівномірного руху в інтервалі від t до t+t називається векторна величина, рівна відношенню зміни швидкості v до інтервалу часу t :
![]()
Миттєвим прискоренням а (прискоренням) матеріальної точки у момент часу t буде межа середнього прискорення :

Таким чином, прискорення а є векторна величина, рівна першій похідній швидкості за часом. Розкладемо вектор v на дві складові. Для цього з точки А (мал. 4) по напряму швидкості v відкладемо вектор AD, по модулю рівний v1. Очевидно, що вектор CD, рівний v, визначає зміну швидкості по модулю за час t: v=v1 - v. Друга ж складова вектору v -vn характеризує зміну швидкості за час t по напряму.
Тангенціальна складова прискорення

тобто дорівнює першій похідній за часом від модуля швидкості, визначаючи тим самим швидкість зміни швидкості по модулю. Знайдемо другу складову прискорення. Припустимо, що точка В досить близька до точки А, тому As можна вважати дугою кола деякого радіусу r, АВ., що мало відрізняється від хорди. Тоді з подібності трикутників АОВ і EAD виходить vn/AB = v1/r, але оскільки AB = vt, то
У межі при t0 отримаємо v1v. Оскільки v1v, кут EAD прагне до нуля, а оскільки трикутник EAD рівнобедрений, то кут ADE між v і vn прагне до прямого. Отже, при t0 векторів vn і v виявляються взаємно перпендикулярними. Оскільки вектор швидкості спрямований по дотичній до траєкторії, то вектор vn, перпендикулярний вектору швидкості, спрямований до центру її кривизни. Друга складова прискорення, рівна
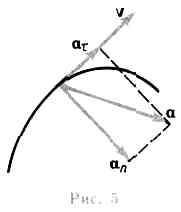
називається нормальною складовою прискорення і спрямована по нормалі до траєкторії до центру її кривизни (тому її називають також доцентровим прискоренням). Повне прискорення тіла є геометрична сума тангенціальної і нормальної складових (рис.5) :
Отже, тангенціальна складова прискорення характеризує швидкість зміни швидкості по модулю (спрямована по дотичній до траєкторії), а нормальна складова прискорення - швидкість зміни швидкості по напряму (спрямована до центру кривизни траєкторії).
Залежно від тангенціальної і нормальної що становлять прискорення рух можна класифікувати таким чином: 1) а=0, аn = 0 - прямолінійний рівномірний рух; 2) a=a=const, an=0 - прямолінійний рівнозмінний рух. При такому виді руху
Якщо початковий момент часу t1=0, а початкова швидкість v1=V0, то, позначивши t2 = t і v2 = v, отримаємо a = (v - v0) /t, звідки v =v0 at. Проінтегрував цю формулу в межах від нуля до довільного моменту часу t, знайдемо, що довжина шляху, пройденого точкою, у разі рівнозмінного руху
3) а=f (t), аn=0 - прямолінійний рух зі змінним прискоренням; 4) а=0, аn=const. При а=0 швидкість по модулю не змінюється, а змінюється по напряму. З формули аn= v2/r виходить, що радіус кривизни має бути постійним. Отже, рух по колу є рівномірним; 5) а=0, аn0 - рівномірний криволінійний рух; 6) a=const, an0-криволінійний рівнозмінний рух; 7) a= f (t), an0 - криволінійний рух зі змінним прискоренням.