

§ 14. Графічне представлення енергії
У багатьох завданнях розглядається одновимірний рух тіла, потенційна енергія якого є функцією лише одній змінній (наприклад, координати х), тобто П=П (x). Графік залежності потенційної енергії від деякого аргументу називається потенційною кривою.
Аналіз потенційних кривих дозволяє визначити характер руху тіла. Розглядатимемо тільки консервативні системи, тобто системи, в яких взаємні перетворення механічної енергії на інші види відсутні.
Тоді справедливий закон збереження енергії у формі (13.3). Розглянемо графічне представлення потенційної енергії для тіла в однорідному полі тяжкості і для пружнодеформованого тіла.
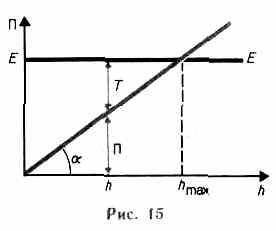
Потенційна енергія тіла масою т, піднятого на висоту h над поверхнею Землі, згідно (12.7), П (h) = mgh. Графік цієї залежності П = П (h) - пряма лінія, що проходить через початок координат (мал. 15), кут нахилу якої до осі h тим більше, чим більше маси тіла (оскільки tg = mg).
Нехай повна енергія тіла рівна Е (її график- пряма, паралельна осі h). На висоті h тіло має потенційну енергію П, яка визначається відрізком вертикалі, ув'язненим між точкою h на осі абсцис і графіком П (h). Природно, що кінетична енергія Т задається ординатою між графіком П (h) і горизонтальній прямій ЇЇ. З мал. 15 витікає, що якщо h=hmax, то Т=0 і П = E=mghmax, т. е. потенційна енергія стає максимальній і рівній повній енергії.
З приведеного графіку можна знайти швидкість тіла на висоті h :
T=E-П,
тобто
mv2/2=mghmax-mgh, звідки
v = 2g(hmax-h).
Залежність потенційної енергії пружної деформації П=kx2/2 від деформації х має вигляд параболи (мал. 16), де графік заданої повної енергії тіла Е - пряма, паралельна осі абсцис х, а значення Т і П визначаються так само, як на мал. 15.
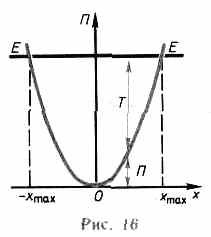
З мал. 16 витікає, що із зростанням деформації х потенційна енергія тіла зростає, а кінетична - зменшується. Абсциса xmax визначає максимально можливу деформацію розтягування тіла, а - xmax- максимально можливу деформацію стискування, тіла. Якщо х=±xmax, то T=0 і П=E = kx2max/2, т. е. потенційна енергія стає максимальній і рівній повній енергії.
З аналізу графіку на мал. 16 витікає, що при повній енергії тіла, рівною Е, тіло не може зміститися правіше xmax і лівіше - xmax, оскільки кінетична енергія не може бути негативною величиною і, отже, потенційна енергія не може бути більша за повну. У такому разі говорять, що тіло знаходиться в потенційній ямі з координатами -xmax x xmax
У загальному випадку потенційна крива може мати досить складний вигляд, наприклад з декількома максимумами, що чергуються, і мінімумами (рис.17). Проаналізуємо цю потенційну криву.
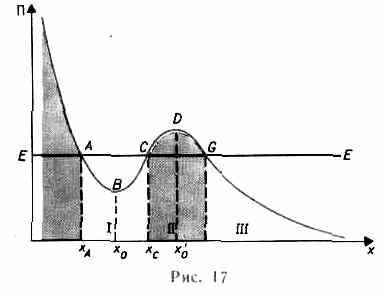
Якщо Е - задана повна енергія частки, то частка може знаходитися тільки там, де П (х) E, тобто в областях I і III. Переходити з області I в III і назад частка не може, оскільки їй перешкоджає потенційний бар'єр CDG, ширина якого дорівнює інтервалу значень х, при яких E<П, а його висота визначається різницею Пmax - E. Для того, щоб частка змогла здолати потенційний бар'єр, їй необхідно повідомити додаткову енергію, рівну висоті бар'єру або що перевищує її. У області 1 частка з повною енергією Е виявляється "замкнутою" в потенційній ямі ABC і здійснює коливання між точками з координатами xA і хс.
У точці В з координатою x0 (мал. 17) потенційна енергія частки мінімальна. Оскільки сила (см §12) Fх=-дП/дх, що діє на частку, дх (П - функція тільки однієї координати), а умова мінімуму потенційної енергії дП/дх=0, то в точці В Fx = 0. При зміщенні частки з положення x0 (і вліво, і управо) вона випробовує дію повертаючої сили, тому положення x0 є положенням стійкої рівноваги. Вказані умови виконуються і для точки х'0 (для Пmax). Проте ця точка відповідає положенню нестійкої рівноваги, оскільки при зміщенні частки з положення х'0 з'являється сила, прагнуча видалити її від цього положення.