

2553
.pdf7.3. Приведение масс
Для определения приведенных масс все движущиеся детали разбивают на три группы по характеру движения. Массы, совершающие возвратно поступательное движение (поршень, палец, кольца), считают сосредоточенными в центре оси поршневого пальца. Массы, совершающие вращательное движение (шатунные шейки, щеки, противовесы), считают сосредоточенными в центре оси шатунной шейки. Массы, совершающие сложное плоскопараллельное движение (шатун), часть массы шатуна относят к центру оси поршневого пальца, а часть относят к центру оси шатунной шейки коленчатого вала. Так как форма шатуна у автотракторных двигателей почти одинакова, то для приближенных расчетов можно принять
mшп 0,275mш;mшк 0,725mш,
где mшп – масса шатуна, отнесенная к поршню; mшк – масса шатуна, отнесенная к оси шатунной шейкиколенчатоговала; mш – массашатуна.
Для того чтобы приведенная система кривошипно-шатунного механизма была эквивалентна действительной, необходимо соблюдать следующие условия:
1.Одинаковые массы.
2.Одинаковое положение центра тяжести приведенной системы.
3.Одинаковые моменты инерции.
4.Одинаковую жесткость деталей для действительной и приведен-
ной системы.
1. Массы, совершающие вращательное движение
mr mшш 2mщ 2mпр mшк ,
где mшш – масса шатунной шейки;mщ – масса щеки;mпр – масса про-
тивовеса; mшк – масса шатуна, отнесенная к кривошипу. Приведенные массы возвратно-поступательного движения:
mj mпг mшп ,
где mпг – масса поршневой группы; mшп – масса шатуна, отнесенная к поршню.
Приведенные массы вращающихся деталей определяют на основании равенства центробежных сил инерции.
Для щеки mщ 2 mщп r 2;mщп mщ , r
100

где mщ – масса щеки; mщп – масса щеки приведенная; – расстояние
от оси вращения коленчатого вала до центра тяжести щеки. Приближенно можно принять r/2, где r – радиус кривошипа.
Для противовеса mпр 1 2 mпр.п r 2;mпр.п mпр 1 , r
где mпр – масса противовеса; mпр.п – масса противовеса приведенная;
1 – расстояние от оси вращения коленчатого вала до центра тяжести противовеса. Для приближенных расчетов можно принять 1 r/2.
Для современных двигателей конструктивные массы, отнесенные к единице площади поршня в таблице (в кг/м2).
|
|
Таблица 5 |
Элементы кривошипно-шатунного меха- |
Карбюраторные |
Дизельные дви- |
низма |
двигатели |
гатели |
|
Dц=(60–100)мм |
Dц=(80–120)мм |
Поршень из алюминиевого сплава mn |
100–150 |
150–300 |
Шатун |
100–200 |
250–350 |
Неуравновешенные части одного колена |
|
|
без вала противовесов mК |
|
|
Стальной кованый вал (сплошные шатун- |
150–200 |
200–300 |
ные шейки) |
|
|
Чугунный литой вал (полые шатунные |
100–200 |
150–350 |
шейки) |
|
|
Большие величины соответствуют двигателям с большим диаметром цилиндра. Для двигателей, у которых S/Dц 1, следует брать
меньшие величины. Большие величины соответствуют двигателям с двумя шатунами на одной шейке.
7.4. Определение сил инерции
Силы инерции от возвратно-поступательно движущихся масс:
Pj mj j mjr 2(cos cos2 )
Если обозначитьmjr 2 A, Pj A(cos cos2 ).
Как и ускорение будем иметь Pj1 Acos , Pj2 A cos2
Первого порядка с периодом изменения 360º и второго с периодом изменения 180º. В верхней мертвой точке Pjmax A(1 ) – име-
101
ет максимальное значение с отрицательным знаком, растягивает шатун, в нижней мертвой точке Pj A(1 ) – имеет положительный
знак, сжимает шатун. Графическое построение выполняют в том же масштабе, что и силы давления газов.
Силы инерции от возвратно-поступательно движущихся масс действуют вдоль оси цилиндра и являются переменными по величине и направлению, через коренные подшипники передаются на картер двигателя и если не уравновешены, передаются на опоры двигателя. Диаграмма может быть построена аналитическим путем или методом касательных и т.д.
Центробежная сила инерции от вращающихся масс может быть определена из выражения
Кr Krк Krшш (mкr 2 mшкr 2) (mк mшк )r 2,
где Krк – центробежная сила коленчатого вала; Krшш – центробежная сила от шатуна, отнесенная к кривошипу.
7.5.Суммарные силы и моменты, действующие
вкривошипно-шатунном механизме
Силы, действующие в кривошипно-шатунном механизме, могут быть определены на основании диаграммы суммарных сил, приложенных к поршневому пальцу, которые определяют по формуле
P Pj Pr ,
где Pr – сила давления газов; Pj – сила инерции.
Построение диаграммы суммарных сил (рис. 42) выполняют, как правило, на четырех ходах поршня, иногда на двух развертках сил окружности, описываемых осью шатунной шейки. Силу P , действующую вдоль оси цилиндра, раскладывают на две составляющие: перпендикулярную к оси цилиндра N P tg и направленную вдоль оси цилиндра
S P/cos .
Сила N (боковая сила) прижимает поршень к зеркалу цилиндра, совместно с силой N создает опрокидывающий момент, который воспринимается опорами двигателя; имеет положительный знак, если направлен в сторону, противоположную вращению коленчатого вала. Сила S, действующая вдоль оси шатуна, имеет положительный знак, если сжимает шатуниимеетотрицательныйзнак,еслирастягиваетшатун.
102

Рис. 42. Схема определения суммарных сил, действующих в кривошипно-шатунном механизме
Силу S переносят на ось шатунной шейки и раскладывают на две составляющие: силу Т, направленнyю перпендикулярно к оси кривошипа, и силу k, направленную вдоль оси кривошипа.
T Ssin( ) P |
sin( ) |
|
|
|
cos |
||
|
|
||
K Scos( ) P |
|
cos( ) |
|
|
cos |
||
|
|
||
Сила Т – тангенциальная сила, создает крутящий момент на коленчатом валу двигателя, имеет положительный знак, если направлена в сторону вращения коленчатого вала, и отрицательный знак, если направлена в сторону, противоположную вращению коленчатоговала.
Нормальная сила K, действующая вдоль кривошипа, имеет положительный знак, если сжимает кривошип, и отрицательный, если его растягивает.
103
Тангенциальная сила является единственной, которая создает крутящий момент на коленчатом валу. Крутящий момент может быть определен из выражения
|
|
ТrF |
P |
sin( ) |
F r. |
|
cos |
||||
|
кр |
n |
|
n |
Так как радиус кривошипа для данного двигателя есть величина постоянная, то и кривая тангенциальных сил является кривой крутящего момента, но в другом масштабе.
Нормальная сила будет положительной, если сжимает кривошип и отрицательной, если его растягивает. Кроме нормальной силы вдоль радиуса кривошипа действует центробежная сила от вращающихся масс, которая направлена вдоль радиусакривошипаиотцентравращения.
После |
K K Kr . |
строят |
диаграммы |
||
определения |
этих |
сил |
|||
N f ( ); |
S f ( ); T f ( ). |
Построение кривой крутящего момен- |
|||
та можно производить графическим сложением кривых тангенциальных сил с учетом сдвига фаз газораспределения.
Порядок построения диаграммы.
1.Строим индикаторную диаграмму.
2.Строим диаграмму инерциальных сил.
3.Строим диаграмму суммарных сил.
На основании диаграммы суммарных сил осуществляем построение диаграммы тангенциальных сил. Диаграммы тангенциальных сил одновременно являются кривой крутящего момента, но в другом масштабе. Кривая крутящего момента, действующая на последнюю коренную шейку, получается в результате графического сложения кривых тангенциальных сил от всех цилиндров с учетом сдвига фаз газораспределения.
Для четырехтактных двигателей угол сдвига фаз 720/i – при равномерном чередовании вспышек, а для двухтактных 360/i, i – число цилиндров. При неравномерном чередовании вспышек сдвиг фаз вычисляется по диаграмме фаз распределения. Для определения среднего крутящего моментов тангенциальную диаграмму делят на число цилиндров, затем кривые переносят на одну часть и графически складывают между собой. Подсчитывают положительные и отрицательные площади. Из положительной вычитают отрицательную и полученную разность делят на длину одной части диаграммы. Этим определяют величину средней тангенциальной силы, действующей на последнюю коренную шейку.
104

кр ТсрrFn р
Площадь, отсекаемая средней тангенциальной силой, называется избыточной и используется для расчета маховика.
7.6. Расчет маховика
Энергия маховика EM QизбFn .
|
|
|
m |
M |
V2max |
|
m |
M |
V2 |
|
D2 |
|
2 |
2 |
|
|
|
E |
|
|
|
|
|
|
min |
m |
|
M |
|
max |
min |
|
, |
||
|
M |
|
|
|
2 |
|
|
|
2 |
|
M |
4 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где Qизб – избыточная площадь, мм2; mM – масса маховика; Vmax2 и
V2 |
– окружные скорости; D2 |
– диаметр маховика по среднему обо- |
||||||||||||||||||||||||||
min |
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ду. |
Из условий заданной равномерностью хода маховика будем |
|||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
иметь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
D2 |
2 |
2 |
|
|
|
|
|
D2 |
|
|
||||||||||||
|
Q |
F m |
M |
|
|
М |
|
|
|
|
max |
|
min |
|
m |
M |
M |
2 ; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
изб |
n |
4 |
|
|
|
|
|
2 |
|
|
|
|
|
|
4 |
|
|
ср |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
max min |
|
|
ср |
; |
max min |
; |
n |
; |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
ср |
|
|
|
|
|
|
|
30 |
|
|
||||
|
|
|
|
|
|
|
D2 |
|
2n2 |
|
|
|
|
|
|
Q |
F 3600 |
|||||||||||
|
Q |
F m |
|
|
M |
|
|
|
|
;m |
|
|
изб |
n |
|
|
|
|
; |
|||||||||
|
|
|
|
|
|
|
|
|
D2 2n2 |
|
||||||||||||||||||
|
изб n |
M |
|
|
4 900 |
|
M |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
М |
|
|
|
|
|
||
|
|
|
|
S p; |
|
. |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
300 |
|
|
|
|
|
|
|
|||||
Величины зависят от типа и назначения двигателя. Чем меньше , тем больше равномерность ходадвигателяибольшемассамаховика.
7.7. Поверка маховика на трогание автомобиля с места
2
E 12m 2D2К nк2 12m 2Dк2 in21 ;iтр iкпп iзм ;
ТР
105

|
|
|
m V2 |
m V2 |
|
1 |
|
|
|
2 |
|
2 |
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
||||||||||||
Е |
|
|
M M |
|
|
M |
1 |
|
|
|
|
m |
|
|
D |
|
|
|
(n |
|
n |
); |
|
E E |
|
; |
|||||||||||||
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
M |
|
2 |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
1 |
|
|
|
|
M |
|
|||||||||||||
|
|
|
1 |
|
|
|
2 |
|
2 |
|
|
2 |
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
2 |
|
n2 |
|
|
|
|||||
|
|
|
|
|
|
m |
|
D |
|
|
(n |
|
n |
) |
|
|
|
|
m |
|
|
D |
|
|
1 |
; |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
К i2 |
|
|
||||||||||||||||||||||||
|
|
|
|
2 М |
|
M |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D2n2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТР |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
mM m |
|
|
|
|
|
|
к |
|
1 |
|
|
|
|
|
|
|
; n |
|
|
|
|
; |
|
|
|
||||||||||
|
|
|
|
D2 |
(n2 n2) i2 |
|
3n |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
1 |
|
|
ТР |
|
|
|
|
|
|
Н |
|
|
|
||||||||
об
n1 850 900мин; 0,85 0,92
7.8. Усилия, действующие на шейки коленчатого вала
На шатунную шейку действует тангенциальная сила Т и нормальная сила К, которая включает и центробежную силу от нижней головки шатуна.
Rшш Т Кчш К; Rшш 
 Т2 (Кчш К)2 ; Kчш К К .
Т2 (Кчш К)2 ; Kчш К К .
Таким образом, величина Rшш может быть определена аналитическим путем для каждого положения кривошипа. Направление результирующей силы может быть найдено углом между осью кривошипа и вектором К .
T T tg K/ Kчш K .
Результирующую силу для каждого значения угла поворота коленчатого вала можно вычислить графическим путем. Для того чтобы ориентировать силу относительно шатунной шейки, графическое построение производят в виде полярной диаграммы.
7.9. Порядок построения диаграммы
Силы, действующие на коренную шейку коленчатого вала находят графическим сложением сил, передающихся от двух колен, т.е. от каждого колена передается половина и усиливает Kчш .
Kчш 0,5Rшш 0,5Rшш ,
106

гдеRшш – сила, действующая на коренную шейку справа;Rшш – сила, действующая на коренную шейку слева.
8. УРАВНОВЕШИВАНИЕ ДВИГАТЕЛЕЙ
Двигатель считается уравновешенным, если на его опоры действуют постоянные по величине и направлению усилия (при установившемся режиме работы двигателя). У неуравновешенных двигателей силы, действующие на опоры, непрерывно изменяются, а это вызывает вибрацию подмоторной рамы автомобиля и целый ряд неприятных явлений.
1. Причиной неуравновешенности является наличие сил инерции возвратно-поступательно движущихся масс и вращающихся масс и их моменты, которые изменяются по величине и направлению. В многоцилиндровых двигателях неуравновешенные силы Ρj и Κr отдель-
ных цилиндров могут вызывать появление неуравновешенных продольных моментов.
Поэтому задачей уравновешивания является создание путем конструктивной компоновки такого сочетания отдельных сил инерции движущихся масс, при котором результирующая свободная сила инерции и результирующий свободный продольной момент обратились бы в нуль.
R r j (Rc j)x (Rz j)y 0,
M r j (Mr j)x (Mc j)y 0.
2. Причиной неуравновешенности является переменность крутящего момента от сил давления газов и равному ему, но противоположно направленному моменту, воспринимаемому опорами. Полного уравновешивания двигателя добиться невозможно хотя бы потому, что неизбежная неравномерность крутящего момента будет вызывать периодические нагрузки на опоры двигателя.
Поэтому понятие уравновешенности имеет в виду соблюдение допустимой степени неуравновешенности двигателя.
Практически уравновешивание двигателя достигается путем выбора числа и расположения цилиндров, размещением колен коленчатого вала, установкой противовесов и т.д. Для суждения об уравновешенности двигателя ограничиваются рассмотрением свободных сил и моментов первых двух порядков. Для получения конструктивно предусмотренной уравновешенности предъявляется ряд требований к
107

производству отдельных деталей, а также к сборке и регулировке механизмов и отдельных узлов, соблюдение допусков наразмерыимассы.
Установление допусков обуславливается выполнением следующих условий:
1)равенство масс поршневых групп;
2)равенство масс и одинаковое положение центров тяжести ша-
тунов;
3)статическая и динамическая уравновешенностьколенчатоговала. Регулировка двигателя должна обеспечивать идентичность про-
текания рабочего процесса по отдельным цилиндрам, для чего необходимо иметь:
1)одинаковое наполнение цилиндров;
2)одинаковую степень сжатия;
3)одинаковый состав смеси по цилиндрам;
4)одинаковый угол опережениязажиганияиливпрыскатопливаит.д.
8.1. Уравновешивание центробежных сил коленчатого вала
Уравновешивание центробежных сил достигается таким размещением вращающихся масс коленчатого вала, при котором выполняются следующие условия:
1)центр тяжести приведенной системы вала находится на оси вращения;
2)сумма моментов от центробежных сил вращающихся масс относительно любой точки оси вала равна нулю. В том случае, когда ось вращения является главной центральной осью инерции вала, оба условия выполнимы.
Соблюдение первого условия достигается статической уравно-
вешенностью, которая имеет следующий аналитический вид:
Rr 
 Rrx2 Rry2 0.
Rrx2 Rry2 0.
Осуществление второго условия возможно только при выполнении первого условия и достигается динамической уравновешенностью коленчатого вала, которую производят на балансировочном станке. Для динамической уравновешенности необходимо равенство нулю результирующего продольного момента относительно любой точки оси вала.
108
M r 
 M rx2 M ry2 0;
M rx2 M ry2 0;
Оба эти условия уравновешенности коленчатого вала представляют собой условия замкнутости как силового многоугольника, так и многоугольника векторов моментов от центробежных сил.
В одноколенном и двухколенном валах центробежные силы уравновешиваются противовесами (рис. 43, 44). Многоколенные валы некоторых многоцилиндровых двигателей оказываются уравновешены без противовесов, если соблюдены следующие условия:
1)число колен вала должно быть четное и не меньше четырех;
2)вал должен иметь плоскость симметрии, перпендикулярную к оси вала, и проходить через середину вала;
3)центр тяжести должен быть расположен на оси вращения вала.
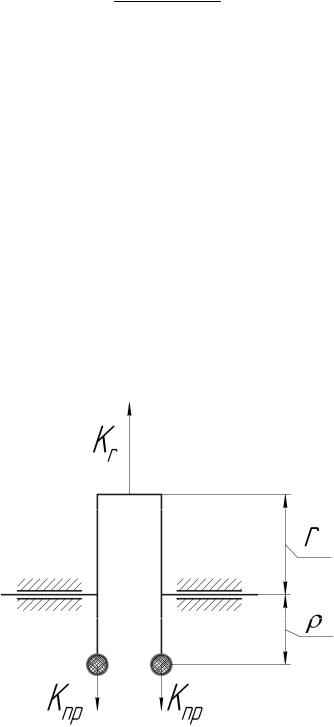
8.2.Уравновешивание одноколенного вала
Рис. 43. Уравновешивание одноколенного вала
2Кпr Кr |
; 2тпр w2 mk rw2; тпр |
1 |
mk |
r |
. |
|
|
||||
|
2 |
|
|
||
109