

Лёссовые грунты в условиях засушливого климата юга России в связи с особенностями их структуры (тонкие вертикальные канальцы, стенки которых скреплены известковым веществом) могут стоять в сухих местах вертикальной стенкой. Поэтому выемки в лёссах устраивают не ближе чем Н +5 м от бровки (где Н – высота откоса выемки, м), с откосами 1: 0,1 – 1: 0,5. Такой поперечный профиль неприменим в лёссовидных суглинках и в лёссах в районах с более влажным и дождливым климатом, где необходимо придавать откосам выемок заложения от 1: 0,5 до 1: 1,5.
Высота кавальеров не должна превышать 3 м. Их отсыпают не ближе 3 м от внешней бровки откоса выемки. При слабых и переувлажнённых глинистых грунтах, когда тяжесть кавальера может вызывать оползание откоса, кавальер располагают не ближе, чем Н +5 м от бровки (где Н – высота откоса выемки, м).
Чтобы вода, выпадающая во время дождей или образующаяся при таянии снега, не стекала в выемку, между кавальером и откосом выемки отсыпают вал грунта треугольного сечения, называемый бан-
кетом.
Высота банкета не превышает 0,6 м, подошва его откоса должна отстоять от бровки выемки не менее чем на 1 м. Поверхности банкета придаётся уклон 20 – 40 ‰ в сторону от выемки. Между банкетом и кавальером отрывают забанкетную канаву глубиной и шириной по дну не более 0,3 м.
Поперечные профили насыпей принимают по типовым проектам «Типовые материалы для проектирования. Серия 503 – 0 – 48.87. Земляное полотно автомобильных дорог общего пользования».
Контрольные вопросы
1.Что такое «трасса дороги»?
2.Что понимают под планом трассы?
3.Что характеризует коэффициент развития трассы?
4.Как выполняют трассирование?
5.Что такое «тангенциальное трассирование»?
6.Как определить угол поворота трассы?
7.Как вычислить тангенс закругления?
8.Как находится длина кривой?
9.Что понимаем под биссектрисой закругления?
10.Функциональное назначение домера.
11.Что такое «продольный профиль дороги» и как он изображается?
12.Что такое «рабочая отметка дороги»?
50
13.Что понимают под термином «насыпь проходит в нулях»?
14.Что обозначают в скважинах на продольном профиле?
15.Что такое «полоса отвода» дороги?
16.Для чего служит поперечный профиль дороги?
17.Что включает проезжая часть дороги?
18.Назначение краевой укрепительной полосы обочины.
19.Для чего предназначена стояночная полоса обочины?
20.От чего зависит крутизна откосов насыпи?
21.От чего зависит крутизна откосов выемки?
22.Назначение боковых резервов и в каких случаях их можно устраивать?
23.В каких случаях допускается повышать крутизну откосов насыпи?
24.Что понимают под выражением «раскрытая выемка»?
25.Назначение боковых канав (кюветов).
26.Для чего служит нагорная канава и где она устраивается?
27.Для чего на косогорах круче 1 : 5 устраивают уступы?
28.Назначение закюветной полки.
29.В каких случаях устраивают кавальеры грунта?
30.Где располагают кавальеры?
31.Для чего служит забанкетная канава?
5.ОСНОВЫРАСЧЁТОВ ДВИЖЕНИЯ АВТОМОБИЛЕЙ ПОДОРОГАМ
5.1.Движениеавтомобиляподороге. Сопротивлениедвижениюавтомобиля
Все элементы автомобильной дороги должны обеспечивать безопасное движение автомобилей с расчётной скоростью. Чем выше интенсивность движения по дороге, тем больше взаимные помехи испытывают автомобили, и скорость их движения снижается. Поэтому требования к отдельным элементам трассы дороги устанавливают из условия движения по дороге одиночного автомобиля.
Движущийся автомобиль испытывает сложную систему перемещений – поступательное движение на прямых, вращение вокруг вертикальной оси при движении по закруглениям, колебания в продольном и поперечном направлениях, вызываемое наездами колёс на неровности покрытия, и т. д. При обосновании требований к элементам дороги в плане и профиле допускают, что автомобиль движется без колебаний по ровной и твёрдой поверхности.
На дороге на отдельных участках формируется режим движения, который предопределяется:
51
-эксплуатационными свойствами автомобилей;
-транспортно-эксплуатационными показателями дороги;
-дорожными условиями, обеспечивающими возможность развить ту или иную скорость;
-индивидуальными особенностями водителей, избирающих удобную для себя скорость.
Сила тяги, развиваемая двигателем, приложена на ведущие колё-
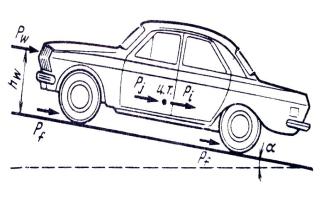
сах автомобиля и расходуется на преодоление сил сопротивления движению (рис. 5.1). В общем случае при движении автомобиля на подъём действуют силы сопротивления [23]:
- сопротивление качению
Р ; - сопротивление движе-
нию на подъём Рi;
- сопротивление воздуха
Р ; - инерционные силы са-
мого автомобиля и вращающихся масс его механизмов Рj, возникающие при изменении скорости движения.
Силы сопротивления качению и сопротивления воздушной среды всегда действуют на движущийся автомобиль и направлены против направления движения. Сопротивление качению вызывается затратой энергии на деформацию шин и дороги. На ровных цементобетонных и асфальтобетонных покрытиях основным фактором, определяющим сопротивление качению, является деформация шин. На менее ровных покрытиях (щебёночных, гравийных, булыжных мостовых) добавляются наезды колёс на неровности покрытия.
При движении по дорогам с твёрдыми покрытиями сопротивление качению прямо пропорционально нагрузке на дорогу:
Рf = ΣGi · fi , (5.1)
где Gi – нагрузка на дорогу от отдельных колёс; fi – коэффициент сопротивления качению.
Сопротивление качению зависит от ровности, состояния и типа покрытия.
Сопротивление движению на подъём и силы инерции в зависимости от продольного профиля дороги и режима движения автомоби-
52
ля могут или отсутствовать, или даже иметь отрицательный знак, способствуя движению (например, при спуске под гору или при торможении).
Таблица 5.1
Значения коэффициента сопротивления качению f
от типа и состояния покрытия
Покрытие |
Значение f |
Цементобетонное и асфальтобетонное |
0,01- 0,02 |
Из щебня или гравия, обработанных органическими вяжущими |
0,02- 0,025 |
материалами |
|
Из щебня или гравия, не обработанного вяжущими, с неболь- |
0,03 - 0,04 |
шими выбоинами |
|
Булыжная мостовая |
0,04 - 0,05 |
Грунтовая дорога, ровная, сухая и плотная |
0,03 - 0,06 |
Пашня, переувлажненный заболоченный грунт, сыпучие пески |
0,15 -0,30 |
|
и более |
Обычно тяговые расчёты ведут применительно к движению при спокойной безветренной погоде, принимая, что сила сопротивления воздуха приложена в центре тяжести автомобиля.
Аэродинамическое сопротивление воздушной среды движению автомобиля вызывается:
-лобовым сопротивлением, которое обусловлено разностью давления воздуха спереди и сзади движущегося автомобиля;
-трением воздуха о боковую поверхность автомобиля и сопротивлением, создаваемым выступающими частями автомобиля – крыльями, зеркалами, номерными знаками и др.;
-затратой мощности на завихрение воздушных струй за автомобилем, около колёс и под кузовом;
-сопротивлением воздуха, проходящего через радиатор и подкапотное пространство.
Сопротивление воздуха возрастает при увеличении скорости движения. При конструировании автомобилей стараются снизить воздушное сопротивление путём повышения их обтекаемости.
Сопротивление движению на подъём с уклоном i создаётся в результате необходимости дополнительных затрат энергии на перемещение автомобиля по наклонной поверхности дороги на некоторую высоту. Для перемещения автомобиля по участку подъёма длиной L на высоту Н нужна работа на преодоление силы тяжести F= G·H.
53
Пренебрегая разницей между фактической длиной наклонного участка дороги и его горизонтальной проекцией, несущественной для допускаемых на автомобильных дорогах продольных уклонов, можно выразить сопротивление движению на подъём на единицу пути:
Pi = F/L=G·H/L = G·i. |
(5.2) |
Коэффициент сопротивления движению на подъём, |
представ- |
ляющий отношение Pi к весу автомобиля G, равен значению продольного уклона, выраженному в десятичных дробях.
Наряду с инерцией поступательного движения при изменении скорости движения возникает инерция Рj вращающихся частей автомобиля (колёс, маховиков, механизмов трансмиссии).
5.2.Динамическиехарактеристики автомобиля
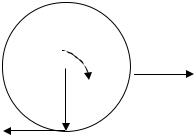
Механическая энергия, вырабатываемая двигателем автомобиля, передаётся через трансмиссию автомобиля на его ведущие колёса. Вращающий момент колеса Мвр вызывает появление пары сил (рис. 5.2). Одна из них – окружная сила Рк, приложенная по площадке контакта шины с покрытием, передаваясь на покрытие, как бы стремится сдвинуть его верхний слой в сторону, противоположную движению,
|
|
вторая сила – тяговое усилие Рp – пере- |
||
Mвр |
даётся через ведущий мост и рессоры |
|||
на раму автомобиля и вызывает |
его |
|||
Рр |
движение. |
|
||
rк |
|
|||
Тяговое усилие |
|
|||
Рк |
Рp = Мвр / rк , |
(5.3) |
||
|
|
|||
|
|
где rк – радиус качения ведущих колёс |
||
Рис.5.2.Вращающий момент |
с учётом обжатия шины в зоне контак- |
|||
та с покрытием. |
|
|||
Mвр,окружнаясилаРк итяговое |
|
|||
Вращающий момент на ведущих |
||||
усилиеPp наколесеавтомобиля |
||||
|
|
колёсах Мвр может быть определён как |
||
|
|
произведение момента двигателя |
Ме |
|
на передаточные числа трансмиссии и коэффициент полезного действия:
Мвр = Ме· iк ·iо ·η , |
(5.4) |
где iк – передаточное число коробки передач; iо – передаточное число главной передачи; механический коэффициент полезного действия трансмиссии автомобиля, учитывающий потери энергии на преодоление сопротивлений во всех механизмах от двигателя до ведущих
54

колёс. Примерные значения КПД трансмиссии составляют для двухосных грузовых автомобилей и автобусов 0,9, для трёхосных грузовых автомобилей – 0,8, для легковых – 0,92.
Условие равенства внешних и внутренних сил (уравнение движения автомобиля) выражается зависимостью
Рp = Рf ± Рi + Р ± Рj, (5.5)
где Рf – сопротивление качению; Рi – сопротивление движению на подъём; Р – сопротивление воздуха движению; Рj – сопротивление инерционных сил.
В зависимости от внешних сопротивлений происходит движение
спостоянной скоростью, разгон или торможение автомобиля. Перенося сопротивление воздушной среды, зависящее от скоро-
сти движения, в левую часть уравнения и подставив значения сопротивлений, получим
Рp – Р = Gf ± Gi ± Gj. |
(5.6) |
Поделив левую и правую части уравнения на G, получим |
(5.7) |
D = f ± i ± j, |
где D = РР РW – динамический фактор автомобиля, представляющий
G
отношение разности силы тяги на ведущих колесах и сопротивления воздушной среды к весу автомобиля.
Динамический фактор характеризует запас тягового усилия на преодоление сил сопротивления движению и характеризует тяговые качества автомобиля. По мере увеличения веса G автомобиля динамический фактор D снижается (числитель остается постоянным). При повышении мощности двигателя возрастает динамический фактор, что позволяет автомобилю преодолевать небольшие продольные подъемы без переключения передачи и не снижать при этом скорость движения [3].
5.3. Сцеплениешинсповерхностьюдороги
Тяговое усилие на колёсах автомобиля может быть реализовано в том случае, если между ведущими колёсами и поверхностью дороги имеется достаточное сцепление. Отношение максимального тягового усилия на колесе Рк к вертикальной нагрузке от колеса на покрытие
Gк называют коэффициентом сцепления φ.
55
В зависимости от направления сдвигающей силы, действующей на колесо, различают два вида коэффициента сцепления:
-коэффициент продольного сцепления φпр, соответствует началу проскальзывания, заторможенного или пробуксовыванию движущегося колеса при качении или торможении. Коэффициент продольного сцепления используют при вычислении пути, проходимого автомобилем при экстренном торможении, и при оценке возможности ускорения автомобиля при начале движения. Как показывают эксперименты, коэффициент сцепления практически не меняется при движении заторможенного колеса под углом к плоскости качения;
-коэффициент поперечного сцепления φпоп – поперечная состав-
ляющая коэффициента сцепления при смещении ведущего колеса, катящегося под воздействием боковой силы под углом к плоскости ка-
чения, когда колесо скользит вбок. Коэффициент φпоп характеризует устойчивость автомобиля при проезде кривых малых радиусов.
Исследования коэффициентов сцепления, проведенные в России
иза рубежом, показали, что на их значение большое влияние оказывает состояние дорожного покрытия.
Впадины на поверхности покрытия между выступами (шероховатости) при увлажнении или загрязнении заполняются грязью, пылью, продуктами износа шин и т. д., это уменьшает возможную глубину вдавливания выступов в резину. Плёнка влаги, смачивая зону контакта между шиной и покрытием, действует как смазка, разделяющая резину и покрытие. При высоких скоростях движения шина не успевает полностью деформироваться, так как продолжительность контакта с покрытием для этого не достаточна, а следовательно, неровности покрытия вдавливаются в шину на меньшую глубину. В результате с ростом скорости коэффициент сцепления снижается (табл. 5.2).
|
|
|
|
|
|
Таблица |
5.2 |
||
Влияние скорости движения на коэффициент сцепления |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Скорость, км/ч |
30 |
40 |
60 |
80 |
100 |
120 |
150 |
|
|
Коэффициент сцепления |
0,50 |
0,45 |
0,39 |
0, 35 |
0,32 |
0, 29 |
0,26 |
|
|
Коэффициенты продольного сцепления при скорости 60 км/ч зависят от состояния покрытия (табл. 5.3). На сухих покрытиях снижение коэффициента сцепления с увеличением скорости происходит менее существенно, чем на увлажненных.
56
Безопасное движение в периоды ухудшения погодных условий по скользкой поверхности покрытий возможно только при пониженных скоростях, соответствующих фактическим значениям коэффициента сцепления.
Требуемые значения коэффициентов сцепления для дорог в зависимости от особенностей их участков и условий движения при увлажненной поверхности покрытий приведены в табл. 5.4 [28].
Таблица 5.3
Значения коэффициента продольного сцепления при различном состоянии покрытия
Состояние |
Значения пр |
покрытия |
|
Сухое шероховатое |
0,7 и более |
Сухое гладкое |
0,6 |
Влажное |
0,5 |
Мокрое |
0,4 - 0,3 |
Грязное |
0,2 - 0,3 |
Обледенелое |
0,1 - 0,05 |
Таблица 5.4
Расчетные значения коэффициента сцепления при проектировании дорог
Условия |
Характеристика участков дорог |
Коэффициент |
движения |
|
сцепления |
|
Участки прямые или на кривых радиусами 1000 м и |
|
Легкие |
более, горизонтальные или с продольными уклонами |
0,45 |
не более 30 ‰, с элементами поперечного профиля, с |
||
|
укрепленными обочинами, без пересечений в одном |
|
|
уровне, при коэффициенте загрузки не более 0,3 |
|
|
Участки на кривых в плане радиусами от 250 до 1000 |
|
Затруднен- |
м, на спусках и подъемах с уклонами от 30 до 60 ‰, |
0,50 |
ные |
участки в зонах сужений проезжей части (при рекон- |
|
струкции), а также участки дорог, отнесенные к лег- |
|
|
|
|
|
|
ким условиям движения, при коэффициенте загрузки |
|
|
в пределах 0,3–0,5 |
|
|
Участки с видимостью менее расчетной; подъемы и |
|
Опасные |
спуски с уклонами, превышающими расчетные; зоны |
|
пересечений в одном уровне, а также участки, отне- |
0,60 |
|
|
сенные к легким и затрудненным условиям, при ко- |
|
|
эффициенте загрузки свыше 0,5 |
|
При сильном износе протектора на мокром покрытии может возникать явление аквапланирования, когда между шиной и покрытием в зоне контакта накапливается вода, которая не успевает отжиматься из-под колеса. Под шиной образуется водяной клин, создающий гидродинамическую подъёмную силу, которая снижает или полностью исключает контакт шины с покрытием. При слое воды на покрытии
57
толщиной в несколько миллиметров нарушение контакта передних колёс с покрытием и потеря управляемости автомобилем становятся возможными при скоростях, близких к 80 – 100 км/ч.
Значение коэффициента сцепления меняется в течение года в широких пределах, повышаясь летом и значительно снижаясь в период зимней гололедицы. Для увеличения сцепления в таких условия дорогу обрабатывают противогололёдными материалами (гигроскопическими солями, растворяющими лёд, песком, шлаком и др.). Иногда на колёса автомобилей монтируют шины с шипами.
При малых коэффициентах сцепления большие тяговые усилия, обеспечиваемые мощностью двигателя, не могут быть использованы из-за недостатка сцепления между колесами и покрытием.
Для достижения стабильных во времени высоких значений коэффициентов сцепления шин автомобилей с поверхностью проезжей части при проектировании следует предусматривать шероховатые покрытия с применением каменных материалов, устойчивых против шлифуемости под воздействием движения, а также устраивать на поверхности цементобетонных покрытий при строительстве искусственную шероховатость.
5.4.Особенностидвиженияавтопоездов
Производительность автопоезда, состоящего из тягача и прицепов, в 1,5 – 2 раза выше, чем у автомобиля без прицепа за счет увеличения массы перевозимого груза. Чтобы обеспечить движение автопоездов, дороги должны обеспечивать более высокие требования к состоянию дорог.
При разгоне автопоезда крутящий момент прикладывается к одной или двум осям, а общее количество осей может достигать шести. Сопротивления качению и движению на подъем приложены ко всем колесам автопоезда. Ускорение автопоезда при начале движения получается значительно ниже, чем для одиночного автомобиля. Особенно оно снижается при движении на подъем из-за ограниченного тягового усилия и увеличенной массы автопоезда. Динамический фактор автопоезда значительно ниже, чем сам автомобиль без прицепа.
Длина автопоезда может достигать 20 м, и при проектировании закруглений предусматривают устройство уширения проезжей части. Чем меньше радиус закругления, тем больше величина уширения.
Уширение назначают при радиусах закругления 1000 м и менее.
58
Сопротивление движению автопоезда выше из-за наличия колес прицепов. Это сопротивление возрастает в летних условиях в 1,5 – 2 раза, в зимних – 2,5 – 5 раз.
Тормоза на автопоезде обеспечивают торможение всеми колесами. Путь, проходимый заторможенным автопоездом, выше, т.к. интенсивность торможения ниже из-за повышенной массы и неодновременного срабатывания тормозов на все колеса.
При проектировании закруглений при наличии в потоке автопоездов увеличивают ширину покрытия в зависимости от длины автопоезда и радиуса закругления.
На крутых спусках ускорение возрастает и движение с большими скоростями по неровному покрытию при наличии кривых в плане очень опасно. Торможение на спусках, особенно длинных, с использованием колесных тормозов нерационально – нагреваются тормозные барабаны, происходит быстрый износ тормозов.
На крутых спусках используют торможение двигателем (путем понижения подачи топлива и уменьшением оборотов двигателя).
Наблюдения показывают, что на спусках используются режимы торможения:
при уклоне i 20 ‰ – движение с тяговым усилием на ведущие колеса независимо от протяженности спуска;
при 30 ‰ i 50 ‰ – движение с выключенным сцеплением на участках длиной до 300 – 500 м, торможение двигателем в нижней части;
при i 60 ‰ – торможение двигателем; при спусках длиной менее 1000 м – совместное торможение двигателем и колесными тормозами.
Подъемы круче 30 – 40 ‰ автомобили большой грузоподъемности и автопоезда, имеющие малый запас мощности, могут преодолеть лишь с пониженными скоростями, вынуждая весь транспортный поток следовать за ними с той же скоростью.
Для создания благоприятных условий движения на подъем на дорогах II и III технических категорий устраивают дополнительные полосы на подъем.
5.5.Расстояниевидимостиповерхностидороги
Для обеспечения безопасности движения необходимо обеспечить требуемое расстояние видимости поверхности дороги. Расчетная видимость – расстояние перед автомобилем, на которое водитель дол-
59
жен видеть перед собой дорогу, чтобы, заметив препятствие, осознать его опасность и успеть затормозить и остановиться. Наименьшее расстояние видимости для остановки должно обеспечивать видимость любых предметов, имеющих высоту 0,2 м и более, находящихся на середине полосы движения, с высоты глаз водителя автомобиля 1,2 м от поверхности проезжей части [28]. Для нахождения расстояния видимости рассмотрим рис. 5.3.
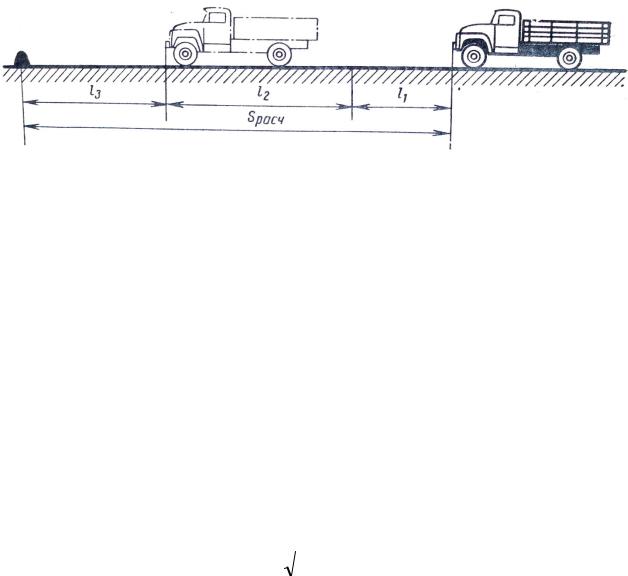
Расчетное расстояние видимости поверхности дороги
Sрасч = l1 + l2 + l3 , (5.8)
где l1 – путь, проходимый за время реакции водителя; l2 – путь торможения; l3 – расстояние безопасности.
Рис. 5.3. Схема определения расстояния видимости поверхности дороги
Для остановки автомобиля или снижения скорости движения используют тормоза. Нормальный режим эксплуатации соответствует не полной блокировке колес.
Длина пути, на котором водитель может остановить автомобиль, движущийся с расчетной скоростью, называется тормозной путь.
Между моментом, когда водитель замечает препятствие, и моментом начала торможения проходит некоторый промежуток времени
– время реакции водителя. Продолжительность реакции водителя составляет 0,6 – 2,0 с. При расчетах принимается t1 = 1 – 2 с.
При этом путь, проходимый автомобилем за время реакции водителя,
l1 |
= V· t1 , |
(5.9) |
||
где V – скорость движения, м/с. |
|
|
|
|
Длина тормозного пути автомобилем ST при равномерном замед- |
||||
лении определяется из зависимости |
|
|||
V = |
|
|
, |
|
|
2aST |
(5.10) |
||
60
где а – отрицательное значение ускорения при торможении, а = ·gпр = =5,5 – 7 м/с2.
Длина тормозного пути
ST = l2 = |
КЭV 2 |
|
, |
(5.11) |
2g( пр i |
|
|||
|
f ) |
|
||
где КЭ – коэффициент эффективности торможения, следует принимать для легковых автомобилей КЭ = 1,2, для грузовых автомобилей и автобусов КЭ= 1,4. При расчете геометрических элементов дорог следует принимать КЭ = 1,2.
Между остановившимся автомобилем и препятствием должно оставаться расстояние безопасности l3, равное 5 ÷ 10 м.
Поскольку расчеты выполняют для скорости движения автомобиля в м/с, то зависимость (5.9) представляют с учетом размерности скорости в км/ч:
|
V t1 |
|
КЭV 2 |
|
|
|
Sрасч = 3,6 |
+ |
+ (5 ÷ 10), м. |
(5.12) |
|||
254( пр i f ) |
||||||
Требуемое расстояние видимости поверхности дороги при проектировании регламентировано [33] и приведено в табл. 5.5.
Расстояние видимости поверхности дороги |
Таблица 5.5 |
||
|
|||
|
|
|
|
Расчетная скорость, |
Наименьшее расстояние видимости, м |
||
км/ч |
|
|
|
|
для остановки |
встречного авто- |
при обгоне |
|
|
мобиля |
|
150 |
300 |
- |
- |
120 |
250 |
450 |
800 |
100 |
200 |
350 |
700 |
80 |
150 |
250 |
600 |
|
|
|
|
60 |
85 |
170 |
500 |
50 |
75 |
130 |
400 |
40 |
55 |
110 |
- |
30 |
45 |
90 |
- |
20 |
25 |
50 |
- |
Рекомендуется при проектировании плана и продольного профиля обеспечивать расстояние видимости для остановки автомобилей – не менее 450 м; расстояние видимости встречного автомобиля – не менее 750 м [28].
61
5.6.Расстояниебоковой видимости
При проектировании дорог в плотно застроенной местности, особенно в городских условиях, а также на пересечениях с автомобильными и железными дорогами в одном уровне, требуется обеспечить боковую видимость придорожной полосы.
Водителю необходимо иметь возможность заблаговременно увидеть пересечение и приближающихся автомобиль или пешехода и успеть остановиться.
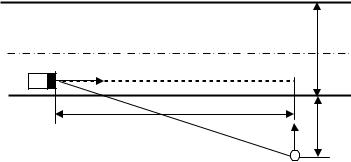
Минимальное расстояние боковой видимости (рис. 5.4)
Sбок = |
Vп |
S |
расч |
, |
(5.13) |
|
|||||
V |
|
|
|||
|
a |
|
|
|
|
В
Va
S
Sбок
Vп
где Vа – расчетная скорость движения автомобиля; Vп – скорость пешехода или транспортного средства по пересекаемой дороге; Sрасч – расчетное расстояние видимости поверхности дороги.
Рис. 5.4. Схема определения расстояния |
Как указано в [9], во |
боковой видимости: |
всех случаях, где по мест- |
В – ширина проезжей части дороги |
ным условиям возможно |
|
регулярное появление на |
дороге людей и животных, следует обеспечивать боковую видимость прилегающей к дороге полосы, отстоящей от бровки земляного полотна для дорог, проектируемых для расчетной скорости 100 км/ч и выше на расстояние 25 м, для остальных дорог – 15 м.
5.7.Обеспечениевидимостина кривыхвплане
При проектировании дорог в плане должно быть обеспечено необходимое расстояние видимости. На участках кривых в плане определяют ширину полос расчистки леса и кустарника, величину срезки откосов выемки и расстояние переноса строений. Величину расчистки определяют расчетом, а уровень срезки откосов выемки принимают одинаковым с уровнем бровки земляного полотна. Видимость в плане проверяют при движении автомобиля по внутренней полосе движе-
62

ния. Принимается, что глаз водителя расположен посередине полосы движения и на высоте 1,2 м.
Расстояние видимости проверяют по траектории движения автомобиля. На практике для построения границ срезки препятствий в зоне видимости применяют графический метод.
На плане закругления, вычерченном в крупном масштабе на траектории движения автомобиля намечают ряд точек, от которых откладывают расстояние видимости. Концы этих отрезков соединяют прямыми линиями, огибающая которых определяет границу видимо-
сти (рис. 5.5).
Намечают уровень срезки в выемках с учетом зарастания полок травой (рис. 5.6).
Срезка должна начинаться на прямой или переходной кривой на расстоянии видимости от начала и конца кривой.
Рис. 5.5. Определение видимости |
Рис. 5.6. Схема удаления |
на горизонтальной кривой: |
препятствий, мешающих видимости: |
а – схема видимости; б – построение |
а – срезка деревьев; б – срезка |
линии видимости |
откосов |
Значительно ухудшается видимость на кривых в плане в ночное время. Фары автомобиля освещают дорогу на расстояние не более 100 м, а середина пучка света фар направлена по касательной к закруглению дороги. Лишь при больших радиусах кривых и на прямых свет фар располагается в пределах дороги.
Для обеспечения видимости ночью на расстояние 100 м радиус кривой в плане должен быть не менее 1000 м.
Для повышения безопасности движения ночью на обочинах устанавливают сигнальные столбики.
63
5.8.Характеристикитранспортногопотока
Режим движения – закономерность изменения характеристик транспортного потока в пространстве и во времени. Режим движения характеризуется скоростью одиночных автомобилей и всего потока, интервалами между автомобилями, числом обгонов, перестроений, режимом разгона и торможения.
Интенсивность движения N – количество автомобилей, проходящих через поперечное сечение автомобильной дороги за единицу времени (час, сутки). В зависимости от интенсивности движения устанавливается категория дороги.
Объем движения – суммарное количество автомобилей, прошедших через данный участок дороги за определенный период времени; измеряют путем наблюдений.
Состав движения р – распределение в % транспортного потока по видам транспортных средств. Состав зависит от района проложения дороги, дня недели, сезона года.
Общими направлениями научно-технического прогресса в автомобилестроительной промышленности является учет отечественных специфических особенностей дорожной сети, допускающих осевые нагрузки 6 тс и 10 тс (в странах ЕС – 13 тс) и полную массу автопоезда до 38 т (в ЕС – 40 - 44 тс), а также выпуск транспортных средств и горючесмазочных материалов, приспособленных к работе в северных условиях (за пределами средней январской изотермы России –20°С). Параметры «безвредности», регулируемые государством, рассматриваются как ограничения в развитии легковых парков.
Грузонапряженность дороги (брутто) G – суммарная масса гру-
зов и транспортных средств, прошедших по данному участку дороги в обоих направлениях в единицу времени.
Пропускная способность автомобильной дороги Р – максималь-
ное количество автомобилей, которое может пропустить данный участок дороги в единицу времени (обычно принимают час). Этот показатель – важнейший при проектировании поперечного профиля и геометрических элементов дороги.
Скорость движения V – качественный показатель транспортной работы автомобильной дороги и ее состояния. Различают следующие виды скоростей.
Конструктивная скорость автомобиля – это максимальная ско-
рость, которую может развить автомобиль данной конструкции. Для
64
легковых автомобилей большого и среднего литража принимается около 200 км/ч.
Мгновенная скорость – фактическая скорость, измеренная в конкретных створах дороги.
Под оптимальной скоростью движения понимают скорость, ко-
торая обеспечивает наиболее эффективную работу дороги и автомобильного транспорта, а также благоприятные условия для работы водителя. Оптимальная скорость по загрузке дороги движением составляет 0,55 скорости движения в свободных условиях.
Для характеристики различных состояний потока автомобилей и условий движения используют следующие характеристики:
1. Коэффициент загрузки дороги движением z – отношение ин-
тенсивности движения N к пропускной способности данного участка (или элемента) дороги Р:
z = N / P. |
(5.14) |
Этот показатель является одним из основных при расчете числа полос движения и размеров геометрических элементов.
2. Коэффициент скорости движения с – это отношение скорости при каком-либо уровне удобства движения Vz к желаемой скорости в свободных условиях Vж, которую выбирает водитель для обеспечения высокой комфортабельности поездки:
с = Vz / Vж . |
(5.15) |
3. Коэффициент насыщения движением , представляющий от-
ношение плотности при каком-либо уровне удобства qz к максимальной плотности qmax, т.е.
= qz / qmax. |
(5.16) |
При проектировании дорог принимают предельные коэффициенты загрузки дорог движением, которые могут быть в конце перспективного срока службы дороги (табл. 5.6) [28].
Таблица 5.6
Коэффициенты загрузки, соответствующие предельным условиям функционирования дороги
Автомобильные дороги |
Категория |
Предельный коэффици- |
|
|
ент загрузки дороги z |
Подъездные к аэропортам I и II классов, |
I-А |
0,50 |
морским и речным портам I и II группы |
|
|
Автомагистрали, скоростные дороги |
I-А, I-Б |
0,65 |
Обычные дороги |
I-В, II и III |
0,70 |
65
При достижении предельных уровней коэффициента загрузки необходимо проводить реконструкцию дорог путем повышения ее технического уровня – увеличения ширины полос движения, увеличения количества полос движения.
5.9. Теории транспортныхпотоков
Характеризовать транспортные потоки и их изменения в различных условиях рельефа, периода суток, сезона года весьма сложно ка- кими-либо формулами. Описать процессы, происходящие в транспортном потоке, и их влияние на скорость каждого автомобиля математическими формулами (математическими моделями) крайне затруднительно. В настоящее время используется 2 группы теорий описания характеристик транспортных потоков [3]:
динамические (детерминированные) модели, которые описывают изменение одной переменной величины с изменением других в виде функциональных зависимостей;
вероятностные модели, позволяющие описать с позиции теории вероятностей изменение характеристик потока автомобилей.
Среди моделей первой группы распространены микроскопические модели.
Упрощенная динамическая модель основана на предположении,
что движение автомобилей в потоке происходит с равными скоростями и на одинаковом расстоянии друг от друга без обгона.
Эта модель не учитывает процессы, происходящие внутри потока (обгоны, задержки, перестроения) при изменении режима движения, и позволяет лишь ориентировочно определить пропускную способность при колонном движении.
Динамическая модель «следования за лидером» использует зави-
симость – ускорение движения заднего автомобиля пропорционально разности скоростей движущихся друг за другом автомобилей.
Задний автомобиль (согласно теории «следования за лидером») движется с ускорением а, равным разности скоростей первого V1 и второго V2 автомобилей, т.е.
а = |
V1 V2 |
|
V |
. |
(5.17) |
t |
|
||||
|
|
t |
|
||
Эта модель дает приемлемые результаты при колонном движе-
нии.
66
Гидродинамическая модель использует уравнение несжимаемой жидкости для нахождения связи между интенсивностью и плотностью движения. Эта модель применяется при изучении однородного по составу потока автомобилей (ламинарное движение).
Динамические модели применимы при высокой интенсивности движения (более 650 900 авт./ч по одной полосе).
Вероятностные модели основываются на законе редких событий и рассматривают движение потока как случайный (стохастический) процесс. Для характеристики применяется распределение Пуассона, которое описывает движение потока однородных автомобилей, редко распределенных по дороге. Максимальную пропускная способность полосы движения находят из теоретических решений динамической (детерминированной) задачи при колонном движении, когда обеспечивается минимальное безопасное расстояние между двумя следующими друг за другом автомобилями.
Для описания транспортных потоков предлагается использовать теорию массового обслуживания, полагая, что каждый автомобиль, въезжающий на дорогу, предъявляет запрос на обслуживание, а дорога является обслуживающим устройством. Из-за несвоевременного или некачественного обслуживания создаются очереди (задержки движения). Это приводит к снижению пропускной способности дороги.
Наличие различных теорий, описывающих процессы в транспортных потоках, показывает сложность решаемых задач и требует дальнейшего изучения транспортных потоков и формирования новых математических моделей для двух- и многополосных дорог.
5.10.Пропускнаяспособностьдороги
Пропускной способностью автомобильной дороги называют мак-
симальное количество автомобилей (приведенных к легковому), которое может пройти через поперечное сечение дороги в единицу времени. Она определяется как суммарная пропускная способность всех полос движения.
Различают:
максимальную теоретическую пропускную способность;
практическую пропускную способность.
Максимальная пропускная способность соответствует условиям: - прямолинейный горизонтальный участок без пересечений;
67
-ширина полосы движения 3,75 м;
-укрепленные обочины шириной 3 м;
-сухое, ровное, шероховатое покрытие;
-поток состоит только из легковых автомобилей;
-видимость дороги более 800 м.
Теоретическую пропускную способность полосы движения принято определять из условия, что автомобили движутся друг за другом с одинаковой скоростью на расстоянии, достаточном для полного торможения автомобиля при остановке впереди идущего. Максимальное расстояние между автомобилями принимается равным расстоянию видимости поверхности дороги (5.13).
Теоретическая пропускная способность одной полосы [3] (авт./ч)
Р = |
1000 V |
, |
(5.18) |
|
|||
|
Sрасч |
|
|
где V – скорость движения потока автомобилей, км/ч; Sрасч – расчетное расстояние, занимаемое автомобилем в потоке.
Анализ зависимости (5.19) показывает, что пропускная способность полосы с увеличением скорости резко возрастает от нуля и достигает максимального значения 1100 – 1600 авт./ч при скорости 20 – 40 км/ч. Затем с увеличением скорости постепенно снижается и при скорости 80 км/ч составляет 700 – 1200 авт./ч.
В качестве исходной пропускной способности при идеальных условиях для легковых автомобилей принято:
-на двухполосных дорогах – 2200 авт./ч в оба направления;
-на трехполосных дорогах – 4000 авт./ч в оба направления;
-на четырехполосных дорогах – 1800 авт./ч по одной полосе.
5.11.Уровни удобствадвижения
Под уровнем удобства движения понимается определенное качественное состояние потока автомобилей, при котором устанавливаются характерные условия аварийности и труда водителей, условия комфортабельности поездки и эффективности работы автомобилей.
Уровни удобств движения изменяются с изменением состава и интенсивности движения, типа транспортных средств, климатических условий и уровня содержания автомобильных дорог. Многие участки автомобильных дорог, особенно на подходах к крупным городам, работают в режиме перегрузки, в этих случаях трудно обеспечить высокий уровень удобств движения (табл. 5.7) [28].
68
Таблица 5.7
Уровни удобства движения
Уро- |
z |
c |
p |
Характеристика |
Со- |
Эмо- |
Удоб- |
Эконо- |
вень |
|
|
|
потока автомо- |
стоя- |
цио- |
ство |
мическая |
удоб- |
|
|
|
билей |
ние |
нальная |
работы |
эффек- |
ства |
|
|
|
|
потока |
загруз- |
водите- |
тивность |
дви- |
|
|
|
|
|
ка во- |
ля |
работы |
жения |
|
|
|
|
|
дителя |
|
дороги |
А |
<0,2 |
> 0,9 |
<0,1 |
Автомобили |
Сво- |
Низкая |
Удобно |
Не эф- |
|
|
|
|
движутся в |
бод- |
|
|
фектив- |
|
|
|
|
свободных ус- |
ное |
|
|
ная |
|
|
|
|
ловиях, взаи- |
|
|
|
|
|
|
|
|
модействие |
|
|
|
|
|
|
|
|
между автомо- |
|
|
|
|
|
|
|
|
билями отсут- |
|
|
|
|
|
|
|
|
ствует |
|
|
|
|
Б |
0,2- |
0,7- |
0,1- |
Автомобили |
Час- |
Нор- |
Мало |
Мало |
|
0,45 |
0,9 |
0,3 |
движутся груп- |
тично |
мальная |
удобно |
эффек- |
|
|
|
|
пами, соверша- |
свя- |
|
|
тивная |
|
|
|
|
ется много об- |
занное |
|
|
|
|
|
|
|
гонов |
|
|
|
|
В |
0,45 |
0,55 |
0,3- |
В потоке еще |
Свя- |
Высо- |
Не- |
Эффек- |
|
-0,7 |
-0,7 |
0,7 |
существуют |
занное |
кая |
удобно |
тивная |
|
|
|
|
большие интер- |
|
|
|
|
|
|
|
|
валы между ав- |
|
|
|
|
|
|
|
|
томобилями, |
|
|
|
|
|
|
|
|
обгоны затруд- |
|
|
|
|
|
|
|
|
нены |
|
|
|
|
Г-а |
0,7- |
0,4- |
0,7- |
Сплошной по- |
Насы- |
Очень |
Очень |
Не эф- |
|
1,0 |
0,55 |
1,0 |
ток автомоби- |
сыщен |
высокая |
не- |
фектив- |
|
|
|
|
лей, движу- |
щен- |
|
удобно |
ная |
|
|
|
|
щихся с малы- |
ное |
|
|
|
|
|
|
|
ми скоростями |
|
|
|
|
Г-б |
≤1 |
≤0,4 |
1,0 |
Поток движется |
Плот- |
То же |
То же |
То же |
|
|
|
|
с остановками, |
ное, на- |
|
|
|
|
|
|
|
возникают зато- |
сыщен- |
|
|
|
|
|
|
|
ры |
ное |
|
|
|
В последние годы в крупных городах остро встал вопрос повышения пропускной способности, чтобы исключить образование заторов движения («пробок»). Решение этой проблемы крайне затруднено: необходимо ограничение движения или строительство дополнительных полос движения или строить новые дороги. Уровни удобств
69
движения необходимо устанавливать в техническом задании на разработку проектной документации на новое строительство, капитальный ремонт и реконструкцию дорог. Эти уровни удобства движения могут изменяться по перегонам и по периодам эксплуатации дорог.
Уровни удобства движения можно характеризовать и такими показателями, как плавность движения автомобиля, степень изменения скорости на отдельных участках, скорость изменения ускорений, действующих на водителя и пассажиров, и др.
5.12.Обоснование необходимогочисла полосдвижения
Значение коэффициента загрузки дороги движением при сдаче ее в эксплуатацию должно составлять z = 0,45 – 0,55 от практической пропускной способности.
В соответствии с уровнем загрузки дороги движением назначают количество полос движения n проезжей части. При определении числа полос движения используют зависимость
n = |
N |
, |
(5.19) |
|
|||
|
z Pmax |
|
|
где N – интенсивность движения, приведенная к легковому автомобилю, авт./ч; – коэффициент сезонной неравномерности движения; z – коэффициент загрузки дороги движением; Рmax – пропускная способность дороги, для двухполосных дорог Рmax = 2000 авт./ч.
Приведенную интенсивность движения автомобилей находят по зависимости
m |
, |
|
N = Ni i |
(5.20) |
|
1 |
|
|
где m – количество типов транспортных средств в потоке; Ni – количество автомобилей i -го типа в потоке; i – коэффициент приведения i-го типа автомобилей к легковому (см. табл. 2.1).
Между часовой интенсивностью движения Nч и среднегодовой суточной интенсивностью движения N имеется зависимость
Nч = 0,076 N. |
(5.21) |
Вследствие изменения дорожных условий по длине дороги происходит изменение и пропускной способности дороги. Для ее характеристики целесообразно строить линейный график пропускной способности дороги и коэффициента загрузки дороги движением.
70