

вмещение их с актуаторами-механизмами) повышает эффективность устройств перекачки энергии и может быть предпочтительнее традиционных средств усиления конструкции (критерии предпочтительности могут быть различными: расход материала, условия эксплуатации и т. д.);
|
|
• совместное использование указанных выше средств с активными |
и пассивными способами управления за счет притока (активный способ) |
||
С |
||
или отбора (пассивный способ) энергии создает новые качественные воз- |
||
можности для управления; |
||
|
|
• расш рен е конструктивных возможностей структурной реализа- |
ции |
АУ. |
|
|
динам |
|
|
3.2. Постановка задачи. Выборы критерия и способа управления |
|
|
|
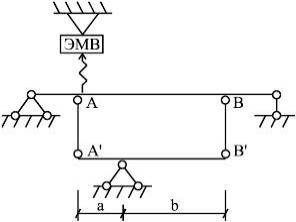
Рассмотр м алку, к которой в узлах А и В прикреплен механиче- |
|
|
б |
ский актуатор (рычаг), который связывает между собой перемещения от- |
||
дельных точек (поперечных сечений) системы в противофазе, т. е. образу- |
||
ет |
|
ческое прот водействие (рис. 3.2). |
|
|
Механ ческ й актуатор в виде рычага осуществляет в автоматиче- |
ском реж ме следующ е функции: измерение перемещений (как проме- |
||
|
|
А |
жуточных величин, ез фиксации этих величин), усиление воздействия (перемещения) и передачу в противофазе воздействия в заданное место с помощью тяг.
Д И
Рис. 3.2. Система активного управления вынужденными колебаниями балки с механическим (рычажным) актуатором
25
При этом существенно увеличивается частота собственных колебаний (ее можно регулировать в зависимости от соотношения плеч рычага). Амплитуда же колебаний во многих случаях может быть значительно уменьшена.
Притяжение узла А к ЭМВ вверх вызывает смещение узла В вниз, т. е. осуществляется противодействие первой форме колебаний балки (при этом WВ WA ).
3.3. Расчет эффект вности управления актуатором-рычагом
Упругая балка с актуатором – это система со многими степенями
свободы. Здесь с целью |
рассматривается система с одной сте- |
С |
|
пенью свободы (р с. 3.3). Масса m находится в i-й точке балки, а возму- |
|
щающая с ла – в точке А. |
|
упрощений |
|
б |
|
А |
|
Рис. 3.3. Балка с механическим (рычажным) актуатором |
|
Для системы с одной степенью свободы амплитуда установившихся |
|||||
вынужденных колебаний в i-й точкеДбалки (без учета сил сопротивления) |
|||||
определяется из уравнения |
|
|
|
|
|
A |
m 2 |
1 P |
i1 |
0. |
(3.1) |
i |
i1 |
1 |
И |
||
|
|
|
|
||
Здесь θ – частота вынужденных колебаний; Ai – амплитуда колебаний в i-й точке балки.
26
Находим значение амплитуды:
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
yст ат |
|
|
|
|
|
ст ат |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 i1 |
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
Ai |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yi |
|
|
|
, |
|
|
|
|
(3.2) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
С |
|
|
|
m 2 1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
ii |
i |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где δi1 |
– прогиб в точке i балки с актуатором (рис. 3.4 ) от единичной силы |
|||||||||||||||||||||||||||||||||||||||||
Pi = 1; |
i2 |
1 |
|
– частота собственных колебаний; |
|
|
|
|
|
1 |
|
|
– коэффи- |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
i1mi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
|
|||
динам |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|||||||||||||
циент |
|
чности. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Пр н мая для упрощения рычаг абсолютно жестким, в результате |
||||||||||||||||||||||||||||||||||||||||||
статического расчета |
алки с актуатором получаем следующую формулу |
|||||||||||||||||||||||||||||||||||||||||
для перемещен |
я в i-й точке |
|
алки от действия P1: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 a |
0 |
|
|
0 a |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
21 |
|
|
|
i1 |
i2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
ст ат |
А |
b |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
y |
i |
|
P |
|
i1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
(3.3) |
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a 2 |
|
|
|
|
|
|
|
|
|||||
|
|
б0 0 |
a |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
2 |
21 |
b |
|
22 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|||||||||||||||||||||||||||
где P1 – амплитудное значение возмущающей силы; |
i01 |
, 110 , |
210 , 120 , 220 – |
|||||||||||||||||||||||||||||||||||||||
перемещения от единичной силы в простой балке (без актуатора-рычага); |
||||||||||||||||||||||||||||||||||||||||||
а, б – плечи рычага. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Выражение в квадратных скобках есть δi1. |
|
Второй член в квадрат- |
||||||||||||||||||||||||||||||||||||||||
ных скобках выражает величину уменьшения перемещений в i-й точке δi1 |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a И |
|||||||||||||||||
за счет влияния актуатора-рычага, перераспределившего внутреннюю |
||||||||||||||||||||||||||||||||||||||||||
энергию деформирования системы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Формула для перемещения в i-й точке балки с актуатором от еди- |
||||||||||||||||||||||||||||||||||||||||||
ничной силы в этой же точке имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1i |
2i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
. |
|
|
|
|
(3.4) |
|||||||
|
|
|
|
|
|
ii |
ii |
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
11 2 12 |
|
|
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
||
Второй член в этой формуле – это влияние актуатора на перемеще- |
||||||||||||||||||||||||||||||||||||||||||
ние 0 |
в балке без актуатора. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ii |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
27
Формулы δii, δi1 получены в результате расчета балки с актуатором как статически неопределимой системы с одним лишним неизвестным (т. е. сначала было определено лишнее неизвестное – усилие в одной подвеске, а затем определены перемещения δ1iи δi1от действия сил P = 1 в точках 1 и i).
Приведем для справки: если сила Р не в точке 1, а в некоторой точке
К, то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
a |
0 |
|
0 a |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i1 |
i2 |
|
|
|
ik |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2k |
|
|
|
|||||||||||||||
|
|
|
|
ст ат |
|
|
|
0 |
|
|
|
|
|
b |
|
|
|
|
b |
|
|
|||||||||||
существование |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(3.5) |
|||||||||||
|
|
|
y |
i |
|
|
|
P |
|
ik |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||
С |
|
|
|
|
1 |
|
|
|
|
0 |
|
|
0 a |
0 |
a |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
11 |
2 12 |
|
|
|
22 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
||||
Отмет м |
|
|
|
|
|
|
|
|
узловой точки на балке, |
амплитуда пере- |
||||||||||||||||||||||
мещений в которой равна нулю. В частном случае, если система симмет- |
||||||||||||||||||||||||||||||||
рична, т. е. |
a |
1, |
|
|
|
|
|
, то узловая точка находится посередине балки, |
||||||||||||||||||||||||
|
11 |
|
22 |
|||||||||||||||||||||||||||||
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
т.е. на оси с мметр |
|
|
. Положение узловой точки можно легко определить, |
|||||||||||||||||||||||||||||
учитывая соотношение |
А |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
б |
y1 |
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
(3.6) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
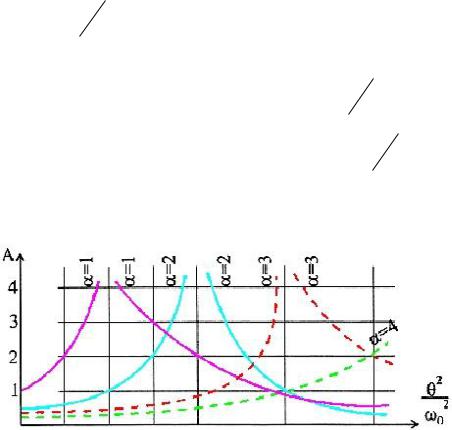
Чтобы проследить влияние актуатора на изменение амплитуды А и частоты колебаний ω, выразим их через амплитуду А0 и через частоту ω0 для той же балки, но без актуатора для случая, когда точка i совмещена с
точкой 1. |
|
|
|
yст ат P 0 1 y0 |
ст ат |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
1 |
, |
(3.7) |
|||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
1 |
11 |
|
b |
|
|
|
|
|
b И |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
1 |
|
11 |
|
|
||||||||
где 11 110 1 11 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
a 2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
, |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
a |
2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
2 |
0 |
|
0 |
0 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
12 |
|
22 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
11 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
02 |
|
2 |
|
|
||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 , |
|
|
||||
|
|
m |
|
|
|
|
|
m 0 |
1 |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
11 |
|
|
|
1 |
|
|
|
|
|
||||||||||||||||||
|
|
|
1 |
|
|
|
|
1 |
11 |
|
11 |
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|||||||
где |
1 |
, 2 |
1 |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
0 |
|
m |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
11 |
|
1 |
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
28
Коэффициент динамичности
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
. |
(3.8) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Амплитуда колебаний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С |
|
|
|
A y1 |
|
y0 ст ат |
. |
(3.9) |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
ст ат |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
Замет м, что при значении α = 1 имеем ω = ω0 |
и A = A0 . |
||||||||||||||||
рис |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Далее пр веден анализ эффективности гашения колебаний балки с |
|||||||||||||||||
помощью актуатора-рычага для случая, когда масса m и возмущающая си- |
|||||||||||||||||
ла расположены в точке 1 ( |
. 3.3). Сравним значения амплитуд A при |
||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
(т. е. амплитудой балки без актуа- |
|||||||
выбранном значен |
|
0 |
|
при α = 1 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тора). |
|
|
|
|
|
|
|
|
Из граф ка (р с. 3.4) следует, например: при |
|
|
|
|
|
2 |
|
|
|
|
|
|
0,5 и α = 3 |
||||
|
А |
|
0 |
|
|
|
||
|
б |
|
|
|
|
|||
|
|
|
|
|
|
|
2 |
|
происходит снижение амплитуды в 5 раз: чем ближе |
|
|
|
|
к единице, |
|||
|
|
|
|
|
|
0 |
|
|
тем больше снижение амплитуды. При этом система с актуатором далека от резонанса, а балка без актуатора Дблизка к резонансу.
Рис. 3.4. График изменения амплитудыИ(А) в точке m в зависимости от соотношения частот и параметра α
Отметим, что для точки i, расположенной между 1 и 2, эффективность гашения возрастает. Форма колебаний балки имеет узловую точку, в которой амплитуда колебаний равна нулю.
С помощью полученных зависимостей и графиков (аналогично, как
29