


Чувствительный элемент воспринимает параметры вибрации (т. е. отклонения в виде перемещений, скорости, ускорений) и передает их с помощью вибропреобразователей в сравнивающее устройство. В нем вы-
деляются сигналы рассогласования, которые через интерфейс и усилитель |
|
поступают в управляющий модуль (УМ) (сравнивающее или корректи- |
|
рующее устройство, например, микропроцессор). По программе, заложен- |
|
С |
|
ной в УМ, формируется |
управляющее решение, которое через интер- |
фейс и усилитель возбуждает силовое исполнительное устройство (актуатор), реал зующее управляющее решение.
стема также снабжена контрольными устройствами, обеспечи-
очки |
|
||
вающими надежность управления. |
|
||
Необход мость ус лителей и преобразователей в схеме обосновы- |
|||
вается тем, что датч |
к чувствительного элемента измеряет перемещения |
||
(отклонен я) в м лл вольтах. |
|
||
Т |
пр ложен я внешнего воздействия и актуатора, реализую- |
||
|
близости |
||
щего управляющее воздействие, как правило, не совпадают. В связи с |
|||
этим мощность актуатора (т. е. достаточная величина его силового воз- |
|||
действия) должна рассчитываться в соответствии с амплитудно- |
|||
частотными характер |
ками упругой системы. Необходимо также уде- |
||
|
|
А |
|
лить особое внимание вопросам устойчивости и стабильности управления |
|||
в зависимости от |
к точке иения. |
||
|
|
2.4. Физический эксперимент |
|
|
|
|
Д |
Для выполнения лабораторной работы использован универсальный |
|||
испытательный стенд (рис. 2.2). |
|
||
|
|
|
И |
Рис. 2.2. Стенд для исследований колебаний балки
16

Стенд состоит из силовой рамы, в отверстиях нижней плоскости которой закреплены опорные стойки. Испытываемая балка установлена на опорные приспособления, смонтированные на опорных стойках. На балке имеются специальные приспособления для установки вибратора и актуатора. Для определения деформаций (амплитуды колебаний) в заданных сечениях на верхнюю и нижнюю грани балки наклеены тензорезисторы сопротивления, включенные попарно по полумостовой схеме в измерительную цепь тензосистемы и соединенные с двухкоординатным самописцем, позволяющим записывать график изменения сигнала с тензодатчика во времени (граф к колебаний).
тенд позволяет проводить испытания по регулированию колеба-
ний, стат ческого |
д намического НДС разрезных и неразрезных балок, |
выполненных з разл чных материалов, от действия статических и дина- |
|
С |
варьируемом числе пролетов. |
мических нагрузок |
|
приНа стенде возможно также моделирование неразрезных балок с упругооседающбми опорами и плоских рамных систем.
2.5. Подготовка и порядок проведения исследований
2.С помощью штангенциркуляАи линейки измерить размеры поперечного сечения балки и линейные размеры.
3.Установить алку на опоры стенда, обеспечивая при этом отсутствие люфтов в опорах.
4.Подключить аппаратуру дляДсоздания и регистрации параметров колебаний.
5.Установить возбудитель колебаний (ЭМВК1). Задать величину возбуждающей силы, т. е. установить требуемый зазор между ЭМВК1 и балкой.
6.Определить частоты и формы собственныхИколебаний балки.
7.Выбрать на конструкции зону желательного гашения амплитуд
колебаний.1. Ознаком ться с спытательным стендом и со средствами регули-рования.
Рис. 2.3. Упрощенная схема САУ по возмущениям
17

8. Подобрать на основе анализа чувствительности балки места расположения актуатора и его тип.
Необходимо, чтобы он оказывал противодействие, величину которого надо рассчитать в зависимости от мест расположения вибратора и актуатора на упругой конструкции.
|
Удобно, когда актуатор и вибратор запитаны от одного источника. |
||
С |
|
||
Тогда можно не измерять параметры внешнего воздействия (рис. 2.3). |
|||
|
9. Включить актуатор и оценить колебания балки от его действия. |
||
|
10. Одновременно включить вибратор и актуатор и оценить эффект |
||
гашения колебан й балки. |
|||
|
притяжен |
||
|
2.6. Метод ка проведения исследований в автоматизированной |
||
|
|
|
с стеме виброгашения |
|
Балка с акт вным ви рогашением представлена на рис.2.2. Исполь- |
||
|
|
братора |
|
зуется пр |
нц п возмущен й.Известна частота, фаза и сила воздействия |
||
( |
|
я) в |
(ЭМ -1). Последняя определяется величиной за- |
зора между металл ческой алкой и электромагнитом ЭМ-1. Отклонения |
|||
балки (ампл туда, частота) могут здесь и не измеряться. |
|||
|
Вел ч на управляющего силового воздействия актуатора (ЭМ-2) |
||
|
|
|
А |
определяется величиной зазора между ним и металлической балкой. Требуемая величина того зазора вычисляется либо в управляющем модуле (УМ), либо оператором на основе ранее измеренных упругих характеристик балки (δi1, δi2, δii) и силового воздействия ЭМ.
Примем, что амплитудные перемещения i-го сечения балки опреде- |
||||||
|
|
|
Д |
|
||
ляются по уравнению управления колебаниями: |
|
|||||
y |
i1 |
P |
i 2 |
P , |
(2.1) |
|
i |
1 |
|
2 |
|
||
где P1, P2 – амплитудные значения усилий соответственно от вибратора |
||||||
ЭМ-1 и от актуатора ЭМ-2 (рис. 2.4 ). |
И |
|||||
|
|
|||||
Рис. 2.4. Функциональная схема активного управления колебаниями балки с визуализацией результатов эксперимента на ПЭВМ
18
Подбирая величину Р2, можно управлять перемещением i-го сечения балки. Знак «минус» в уравнении (2.1 ) свидетельствует о противодействии актуатора ЭМ-2.
Управление актуатором ЭМ-2 (т. е. управление величиной его противодействия) возможно также путем изменения электрических парамет-
Сров на входе ЭМ-2.
Эффективность снижения амплитуды вибрации в разработанной системе определяется качеством изготовления элементов обратной связи, чувствительностью сполнительного элемента, а также располагаемой мощностью с стемы управления.
иНа упругой балке установлен вибратор (ЭМ-1) и электромагнитный актуатор (ЭМ-2) в прот вофазе к вибратору (рис. 2.2 , 2.4 ).
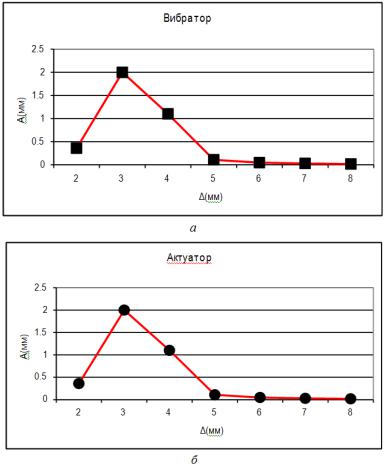
б А Д
Рис. 2.5. Графики влияния величины возмущающегоИ воздействия (величины зазора Δ) на величину
амплитуды колебаний: а – для ЭМ-1; б – для ЭМ-2
1.Путем анализа формы колебаний показано, что актуатор работает
впротивофазе и оказывает противодействие вибратору.
2.Экспериментальным путем на основе ряда измерений построены графики изменения величины воздействия ЭМ-1 и ЭМ-2 в зависимости
19