


1.5. Оценка погрешности экспериментальных измерений
Относительная погрешность измерения модуля нормальной
упругости исследуемого образца рассчитывалась по известной методике
E E E,
E,
где величину Е с учетом формул (1.7), (1.8) и (1.10) можно представить в виде
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lf |
2 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
E cl |
|
|
|
, |
|
|
|
|
|
|
|
|
(1.12) |
||||||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ah |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
l 2 |
J |
|
2 |
|
a 2 |
|
|
|
h 2 |
|
f |
2 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
2 |
|
, |
(1.13) |
|||||||||||
|
|
|
l |
J |
|
|
|
|
|
a |
|
|
|
|
h |
|
f |
|
|
|||||||||||||
где |
ну относ тельной погрешности момента инерции |
|
||||||||||||||||||||||||||||||
|
велич |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
колебательной с стемы можно рассчитать по упрощенной формуле |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
J |
2 l |
|
. |
|
|
|
|
|
|
|
|
|
|
(1.14) |
||||||||
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
бJ l |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Выражение для момента инерции колебательной системы (см. |
|||||||||||||||||||||||||||||||
выражение (1.7)) можно упростить, принимая во внимание, что относи- |
||||||||||||||||||||||||||||||||
тельная погрешность измерения массы дополнительного груза и линейной |
||||||||||||||||||||||||||||||||
|
|
|
|
А |
|
|
|
|||||||||||||||||||||||||
плотности исследуемого образца почти на порядок меньше относительной |
||||||||||||||||||||||||||||||||
погрешности измерения остальных величин, т. е. |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
1 |
|
|
2 |
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
2 |
|
|
|
||||
|
|
|
J m l |
|
|
|
|
l |
|
|
|
m |
|
|
|
|
l |
|
kl . |
|
|
(1.15) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
0 0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
3 |
|
|
|
Д |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|||||
|
Здесь величины l 0 |
и l приблизительно равны, а k – постоянная |
||||||||||||||||||||||||||||||
величина. Тогда выражение (1.13) окончательно примет вид |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
l |
2 |
|
|
|
a |
2 |
|
|
|
h |
2 |
|
|
2 |
|
|
|||||||||||
|
|
E |
|
|
|
|
|
|
|
|
Иf |
|||||||||||||||||||||
|
|
5 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
2 |
. |
|
(1.16) |
|||||||
|
|
|
|
|
l |
|
|
|
|
|
a |
|
|
|
|
|
h |
|
|
|
f |
|
|
|
||||||||
1.6. Пример выполнения работы
Геометрические параметры исследуемого образца равны
Сисследуемых образцов – длины, ширины и толщины пластины – соответственно равны
l = 150 мм; a = 15 мм ; h = 1,0 мм .
Абсолютные погрешности измерений геометрических параметров
иl = 0,5 мм ; a = 0,05 мм ; h = 0,005 мм .
Значен е частоты со ственных колебаний и абсолютная по-
грешность змерен й частоты для исследуемых образцов равны
Vср = 10 Гц; v = 0,05 Гц .
Подставляя найденные значения абсолютных погрешностей
химическим составом определенной длины и массы присоединенного груза. Результаты измерений представляются в табл. 1.1.
измерен й геометр ческ х параметров и частоты в (1.16), для величины |
|||||||||||||||||
относительной погрешности измерения модуля упругости получается |
|||||||||||||||||
|
б |
|
|
|
|
|
|||||||||||
|
|
|
5 |
0,5 2 |
|
|
0,05 |
2 |
|
3 |
0,005 |
2 |
2 |
0,05 |
2 1,98 10 2 , |
||
E |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
15 |
|
1 |
|
|
10 |
|
|
|||||
|
|
|
|
150 |
|
|
|
|
|
|
|
|
|||||
или в процентах: |
% 1,98%. |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
А |
|
|
|||||||||||
Таким образом, относительная погрешность измерения модуля нор- |
|||||||||||||||||
мальной упругости для образца не превышает 2,0%. |
|
|
|||||||||||||||
Для проверки достоверности |
|
определения |
модуля |
упругости на |
|||||||||||||
|
|
|
|
|
|
|
|
|
Д |
||||||||
лабораторной установке проводят калибровочные измерения частот |
|||||||||||||||||
собственных |
колебаний |
опытных |
|
стальных |
образцов |
с известным |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
||||
11
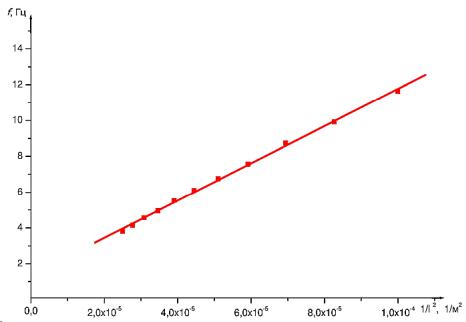
Таблица 1.1
Результаты измерений собственных частот колебаний
|
Номер |
|
l, мм |
a, мм |
|
h, d, |
, мм |
|
m0, |
|
l0, мм |
f, Гц |
|
E, 109 |
|
||
|
опытного |
|
|
мм |
|
мм |
|
|
Па |
|
|||||||
|
образца |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
100 |
14,6 |
|
0,45 |
0,0499 |
|
11,82 |
|
98 |
11,64 |
|
207,97 |
|
||
|
|
материалов |
|
|
|
|
|
|
|
|
|
||||||
СУбед ться, что значения модуля упругости для всех исследованных |
|||||||||||||||||
|
образцов с точностью до 4% соответствуют табличным значениям [2, 3]. |
||||||||||||||||
|
Отклонен |
может |
ыть |
о условлено отклонением химического |
|||||||||||||
|
|
|
табл |
|
|
|
|
|
|
|
|||||||
|
состава |
матер алов |
сследованных образцов |
от химического |
состава |
||||||||||||
|
эталонных ( |
чных) |
|
|
. |
|
|
|
|
|
|
|
|
||||
|
В отчете по ла ораторной ра оте может быть показана графическая |
||||||||||||||||
|
зависимость частоты |
со ственных колебаний образца от квадрата |
|||||||||||||||
|
|
|
|
|
А |
|
|
|
|
||||||||
|
обратной длины исследуемого о разца, как, например, на рис.4. |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
Д |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
И |
||||||
Рис. 1.4. Зависимость частоты собственных колебаний образца от квадрата обратной длины
На рис. 1.4 видно, что частота собственных колебаний исследуемого образца линейно изменяется от квадрата обратной длины образца. Отклонение отдельных значений частоты от линейной зависимости не превышает 0,1 Гц, что составляет 1,25%. Полученная
12
линейная зависимость подтверждает справедливость выведенных аналитических выражений (1.8) и (1.10) для расчета модуля упругости и коррелирует с аналогичными выражениями других авторов [2, 3].
Контрольные вопросы и задания
С1.Назовите недостатки резонансных методов.
2.Как можно найти квадрат циклической частоты собственных колебаний образца?
3.Как выгляд т однородное линейное дифференциальное уравнение второго порядка?
и4. Какой электронный блок позволяет фиксировать на экране компьютерного осц ллографа синусоидальные колебания образца и отсчет частоты в ц фровой форме?
5. Как упрост ть выражение для определения момента инерции колебательнойбс стемы?
6. Какова относ тельная погрешность измерения модуля нормальной упругости для о разца, определенного в лабораторной работе?
АЛа ораторная работа № 2
Активное ви рогашение динамических характеристик стержневых строительных конструкций
Цель работы: добиться уменьшенияДамплитуды свободных коле-
баний балки в области установки возбудителя колебаний (вибратора).
Оборудование и приборы: испытательный стенд (рис.2.1 – 2.2 ),
возбудители колебаний электромагнитного типа (2 шт.), индикаторы часового типа (2 шт.), электроизмерительная аппаратураИ, осциллограф.
2.1.Анализ исходной задачи
Задачи управления колебаниями связаны с управляемым изменением частотных и амплитудных характеристик конструкций с целью гаше-
ния амплитуд колебаний и исключения резонансных явлений.
Анализ литературы позволяет выделить несколько основных методов управления интенсивностью колебаний объектов: уменьшение уровней механических воздействий, возбуждаемых источником (снижение виброактивности источника); изменение конструкций объекта, при котором заданные механические воздействия будут вызывать менее интенсивные колебания объекта и его частей (внутренняя виброзащита объекта);
13
присоединение к объекту дополнительной механической системы, изменяющей характер его колебаний (динамическое гашение колебаний); установка между объектом и источником дополнительной системы, защищающей объект от механических воздействий, возбуждаемых источником (виброизоляция).
Необходимо отметить, что традиционные методы виброзащиты Ссвязаны с использованием пассивных элементов (инерционных, упругих и диссипативных), и часто оказываются неэффективными, особенно в об-
ласти низких частот.
В связи с эт м с 1960-х гг. началась разработка активных систем,
тодов анал за с нтеза в розащитных устройств. Опыт показывает, что при разработке акт вных систем становится необходим учет ряда специ-
являющихся, по существу, системами автоматического управления дви- учитываютсяжением аморт з руемых тел, обладающих независимым источником энергии. Появлен е так х систем требует существенного пересмотра ме-
фических свойствбзащ щаемых о ъектов, являющихся в большинстве случаев упруг ми телами со сла ой диссипацией. Если эти свойства не
, акт вные с стемы могут оказаться неработоспособными. Предпр н мается попытка изложить основы теории активных виб-
розащитных с стем с о ратными связями, представляющие своеобразное сочетание теории колеАаний упругих тел с теорией автоматического управления.
В фундаментальном справочнике «Вибрации в технике» отмечается, что управление в активных системах сводится к компенсации дополнительным источником энергии внешних вынуждающих сил, вызывающих вибрацию защищаемого объектаДили отдельные смещения объекта. Активные системы виброизоляции применяют для защиты технически сложных объектов в тех областях, где предъявляются особо жесткие требования к допустимому уровню вибрации: при виброизоляции прецизионных станков, стартовых платформ ракет, для защиты пилота от перегрузок, для повышения комфортности транспортныхИсредств.
В строительстве для гашения вибраций в высотных зданиях, мостах, вантовых системах очень часто используются динамические гасители колебаний, они могут быть конструктивно реализованы на основе пассивных методов (масс, пружин, демпферов) и активных, имеющих собственные источники энергии. В последнем случае речь идет о применении систем автоматического регулирования, использующих электрические, гидравлические и пневматические управляющие элементы. Удачным является их комбинирование с пассивными устройствами.
14
2.2. Постановка задачи. Выбор критерия и способа проведения испытания
Критерий регулирования: добиться желаемого гашения амплитуды колебаний конструкций.
пособ регулирования: установка дополнительного возбудителя Сколебаний (актуатора) в противофазе основному возбудителю колебаний
(моделирование принципа динамического противодействия).
Применение принципа динамического противодействия весьма обширно и многообразно с позиций конструктивных и экспериментальных
проявлен й.
воположную фазу, поз ции управления колебаниями отражаются только в правой части (сво одном члене) уравнения колебаний системы.
противодействПростейш случай, когда частоты и амплитуды динамического я совпадают с возмущающим процессом, но имеют проти-
Если жебчастота амплитуда не совпадают, но близки друг к другу, то в результате нтерференции двух таких гармонических процессов по-
являются б ен я. Тут меет место и частичное гашение, и всплески в раз-
ные моменты времени.
Возможны случаи, когда ви рооборудование и управляемый актуатор расположены на конструкцииАв разных местах, тогда удается добиться снижения общего уровня коле аний или гашения их в одном месте при усилении (изменении) в других. Для достижения более полного эффекта управления необходимо при егать к нескольким (многомерным) актуаторам или актуаторам, распределенным по длине конструкции.
2.3. Решение поставленнойДзадачи исследования
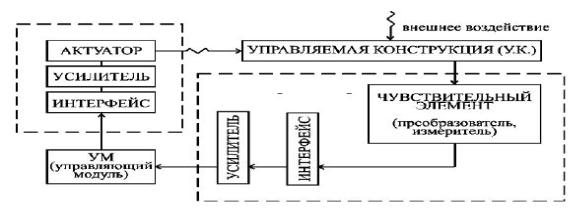
Укрупненная функциональная схема, основанная на принципе от-
клонений (перемещений), представлена на рис. 2.1. И
Рис. 2.1. Функциональная схема САУ по отклонениям
15