

одного конечного элемента будет всегда прямолинейным независимо от вида нагрузки на балку. В этом заключается один из главных недостатков МКЭ.
Чтобы преодолеть этот недостаток и построить более точную эпюру М, обычно уменьшают размеры одного конечного элемента,одновременно увеличивая общее число элементов в конструкции.
|
|
|
Вопросы для самопроверки |
||||
1. |
В чем заключается идея формирования глобальной матрицы жест- |
||||||
кости? |
|
|
|
|
|
|
|
2. |
В чем заключается идея формирования глобального вектора узло- |
||||||
вых нагрузок? |
|
|
|
|
И |
||
|
|
|
|
|
|||
3. |
Как учитываются граничные условия системы? |
||||||
4. |
|
|
|
|
|
Д |
|
Что подразумевается под граничными условиями? |
|||||||
5. |
Как определить число разрешающих уравнений? |
||||||
6. |
Как определяется число степеней свободы всей системы? |
||||||
7. |
|
|
|
|
А |
|
|
Каким способом можно увеличить точность метода конечных |
|||||||
элементов? |
|
|
б |
|
|
||
|
|
|
|
|
|
||
|
|
|
и |
|
|
|
|
|
|
С |
|
|
|
|
|
47
4.ПРИМЕРЫ РАСЧЕТА БАЛОК
4.1.Общая схема алгоритма расчета МКЭ
Представим алгоритм МКЭ в форме метода перемещений основными блоками.
1.Задание исходной информации, которая должна включать:
-количество элементов и узлов;
-координаты узловых точек конструкции в общей системе координат;
-взаимное расположение конечных элементов и узлов в местной
иобщей системе координат;
-внешние узловые, поверхностные и объемныеИсилы;
-условия опирания конструкции (граничные условия);
-геометрические и жесткостные параметры каждого элемента конструкции. Д
2.Построение матрицы жесткости конечного элемента в местной системе координат. А
3.Формирование матрицы преобразования координат для перехода от местной системы координатбк общей.
4.Определение матрицы жесткости общей конструкции в общей системе координат. и
5.Приведение поверхностных и объемных внешних сил, действующих на элементС, к стат чески эквивалентным узловым силам (формирование локального вектора узловых сил).
6.Определение суммарных узловых сил в каждом узле всей конструкции (формирование глобального вектора узловых сил).
7.Учет граничных условий.
8.Определение узловых перемещений конструкции в общей системе координат.
9.Определение внутренних узловых усилий и напряжений в отдельных элементах конструкции.
Решение приведенных ниже задач выполняется по описному выше алгоритму. В отдельных задачах некоторые пункты могут не использоваться.
48
4.2. Расчет статически определимой балки МКЭ
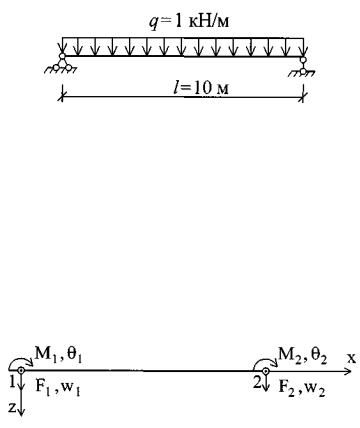
Рассмотрим простую шарнирно опертую балку постоянного сечения (ЕJ = const) длиной l = 10 м, загруженную равномерно распределенной нагрузкой q = 1 кН/м (рис. 4.1).
Рис. 4.1. Расчетная схема
Требуется определить узловые перемещения и построить эпюру прогибов и изгибающих моментов. И
4.2.1. Расчет балки, представленной одним конечным элементом
узлами, с 4 степенями свободы (по двеДв каждом узле) и с заданным направлением глобальныхбосей (рис. 4.2).
1. Рассмотрим балку в видеАодного конечного элемента с двумя
иР с. 4.2. Конечный элемент балки
2. Локальная матрица жесткости имеет размерность 4×4 (коли-
чество узлов элемента умножается на количество степеней свободы в |
||||||
узле): |
С |
|
|
|
|
|
|
k |
11 |
k |
k |
k |
|
|
|
12 |
13 |
14 |
|
|
|
[k]= k21 |
k22 |
k23 |
k24 . |
||
|
k |
31 |
k32 |
k33 |
k34 |
|
|
|
|
k42 |
k43 |
|
|
|
k41 |
k44 |
||||
3. Коэффициенты матрицы жесткости определяются по формуле
(2.23):
kij = ∫0lEJ × Ni" (x) × N"j (x)dx ,
49
где Ni" (x), N "j (õ) – вторые производные функций формы в i-м и j-м
единичных состояниях (i, j =1,…,4), определяемые выражениями
(2.19).
Функция прогибов задается выражением (2.2):
w(x) = N1(x)∆1 + N2(x)∆2 + N3(x)∆3 + N4(x)∆4 ,
где Ni(x) –координатные функции, определяемые выражениями (2.3);
∆ i – неизвестные узловые перемещения (i = 1,…,4).
Рассмотрим вычисление одного из коэффициентов локальной
матрицы жесткости: |
|
|
|
|
|
|
|
l |
6 |
|
|
2x |
|
|
|
|
|
|
|
12 EJ |
|||||||
|
l |
″ |
|
″ |
|
|
|
|
|
|
|
|
|
|
|
2 |
dx = |
||||||||||
k11 = ∫ |
|
N1 (x) × EJ × N1 |
(x)dx = EJ ∫ |
|
|
|
|
( |
l |
|
|
− |
1) |
|
|
|
3 . |
||||||||||
|
|
2 |
|
|
|
|
l |
||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Полностью локальная матрица жесткости имеет вид (2.45): |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
6 |
|
3l |
|
− |
6 |
|
|
3l |
|
|
|
|
|
|
|
||||||
|
|
[k ]= |
2EJ |
|
3l |
|
2l |
2 |
−3l |
|
|
l |
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
3 |
|
А |
|
|
|
|
И. |
|
|
|
|
|
||||||||||||
|
|
|
l |
|
|
|
|
6 |
|
|
−3l |
|
|
|
|
|
|
||||||||||
|
|
|
|
−6 |
|
− |
3l |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
3l |
|
l |
2 |
−3l |
|
2l |
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Подставляя численное значение l =10 м в выражение (2.45), по- |
|||||||||||||||||||||||||||
лучим |
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
0,012 |
|
0,06 |
|
−0,012 |
|
|
0,06 |
|
|
|
||||||||||||||
|
|
|
0,06 |
|
0,04 |
|
|
−0,06 |
|
|
|
0,2 |
|
|
|
|
|||||||||||
|
|
С |
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
||||
|
|
[k ]= EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
−0,012 |
−0,06 |
|
0,012 |
|
|
|
|
−0,06 |
|
|
|
||||||||||||||
|
|
|
0,06 |
|
0,2 |
|
|
|
−0,06 |
|
|
|
0,04 |
|
|
||||||||||||
4. Поскольку конструкция представлена одним конечным элементом, глобальная матрица жесткости совпадает с локальной:
[K ]= [k ].
5.Вектор узловых сил имеет размерность 1×4 (совпадает с числом степеней свободы балочного элемента):
50
F |
|
|
|
1 |
|
{F}= F2 |
, |
|
|
F |
|
3 |
||
F |
|
|
|
4 |
|
где Fi – узловые силы, определяемые по формуле
l |
i =1,...,4 . |
(4.1) |
Fi = ∫q(x)Ni (x)dx, |
||
0 |
|
|
Рассмотрим вычисление одного компонента вектора {F}:
|
|
l |
|
|
|
|
3 |
|
|
|
|
|
2 |
|
|
ql . |
F1 = ql ∫(1+ |
2x3 − |
3x2 |
) dx = |
|||||||||||||
|
|
0 |
|
|
l |
|
|
|
|
|
l |
|
|
|
2 |
|
Аналогично определяем остальные компоненты локального век- |
||||||||||||||||
тора: |
|
|
2 |
|
|
|
Д |
ql 2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
F |
= |
ql |
; F |
= |
ql |
|
; F = − |
|||||||||
|
|
|
|
|
|
|
. |
|||||||||
2 |
|
|
|
А |
|
|
4 |
|
|
|||||||
|
|
12 |
|
|
|
|
|
2 |
|
|
|
И12 |
||||
Полностью локальный вектор узловых сил можно представить |
||||||||||||||||
так: |
|
|
|
|
|
|
|
|
|
|
ql |
|
|
|
||
и |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
|
б |
|
|
|
|
2 |
|
|
||||||||
|
|
|
|
ql |
|
|
|
|||||||||
С |
|
|
|
|
|
|
|
|||||||||
= |
|
|
12 |
|
|
(4.2) |
||||||||||
|
|
|
{F} |
|
|
|
|
ql |
. |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
ql 2 |
|
|
|
|||
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|||
Подставив численные значения q=1 кН/м, l=10 м в выражение |
||||||||||||||||
(4.2), получим |
|
|
|
|
|
|
5,0 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
8,333 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
{F}= |
|
|
5,0 |
|
|
. |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−8,333 |
|
|
|
|||||||||
6. Так как конструкция представлена одним конечным элементом, то глобальный вектор узловых сил {P} совпадает с локальным:
51
{P}= {F}.
7. Определим номера степеней свободы в глобальной системе, в которых перемещения отсутствуют. Это номера 1 и 3. В глобальной матрице жесткости столбцы и строки с данными номер ами вычеркиваются или обнуляются:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
[K ]= EJ |
|
0 |
|
0,4 |
0 |
0,2 , |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|||||||||
|
|
0 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
0 |
0,2 |
0 |
0,4 |
|||||||||
|
|
|
|
|
И |
|
и тогда матрица жесткости всей системы может быть записана в сле- |
||||||
дующем виде: |
0,4 |
0,2 |
|
|||
|
|
[K ]= EJ |
0,2 |
0,4 |
. |
|
|
|
|
|
|
||
|
|
|
|
|
||
|
8. Общая система уравнений в матричном виде записывается |
|||||
так: |
|
б |
Д |
|
||
|
|
и |
|
|
|
|
|
|
[K ]А{∆} − {P} = 0 , |
(4.3) |
|||
или после учета гран чных условий (перемещения отсутствуют) размерность задачи уменьшается:
EJ |
0,4 |
0,2 |
∆ |
|
|
8,333 |
= 0. |
(4.4) |
||
|
|
|
× |
2 |
|
− |
|
|||
|
0,4 |
|
∆ |
|
|
−8,333 |
|
|
||
С0,2 |
|
|
|
|
|
|
||||
|
|
|
4 |
|
|
|
||||
9. Для решения системы уравнений можно применять метод Гаусса, Холецкого, Зейделя и др. После решения системы уравнений (4.4), получаем значения узловых перемещений:
∆ |
|
θ |
|
|
|
41,665/ EJ |
|
2 |
|
= |
2 |
|
= |
|
. |
∆4 |
|
θ4 |
|
−41,665/ EJ |
|||
52