


В методе перемещений основную систему получают путем наложения дополнительных связей на систему заданную. Причем связи накладывают по направлению искомых узловых перемещений или степеней свободы. Для произвольного узла к в дополнительно наложенных связях возникают реактивные силы Rxk и Ryk, которые по существу являются узловыми силами взаимодействия между конечными элементами. Число узловых сил совпадает с числом узловых перемещений и равняется числу степеней свободы.
1.3. Типы конечных элементов
Конечные элементы (КЭ) можно классифицировать по следующим признакам:
- одномерные – стержневые КЭ, используемые для расчета как плоских, так и пространственных стержневых конструкций (табл.
1.1);
|
|
|
А |
|
|
|
|
|
|
Таблица 1.1 |
||||||
|
Параметры одномерных конечныхИэлементов |
|
|
|
|
|
||||||||||
Тип |
Стержневые элементы |
Узловые |
|
|
|
|
Узловые силы |
|||||||||
Д |
|
|
||||||||||||||
|
|
|
перемещения |
|
|
|
|
|
|
|
|
|||||
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б{∆}= |
∆ |
|
|
|
|
F |
|
|
||||||
І |
С |
∆1 |
|
|
|
|
{F}= F1 |
|
||||||||
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
∆ |
|
|
w |
|
F |
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
z1 |
|
||
ІІ |
|
|
∆2 |
|
= |
|
θ1 |
|
M1 |
|
||||||
|
|
{∆}= |
|
|
|
|
|
|
{F}= |
|
|
|
|
|
||
|
|
|
∆3 |
|
|
w2 |
|
M 2 |
|
|||||||
|
|
|
∆ |
|
|
θ |
2 |
|
F |
|
|
|
||||
|
|
|
|
4 |
|
|
|
|
|
|
|
z2 |
|
|||
|
|
|
∆1 |
|
|
u1 |
|
Fx1 |
|
|||||||
|
|
|
∆ |
|
|
w |
|
F |
|
|
|
|||||
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
z1 |
|
||
|
|
|
∆ |
|
= |
|
θ |
|
|
M |
|
|
|
|||
ІІI |
|
|
{∆}= |
3 |
|
|
u |
1 |
|
{F}= |
F |
1 |
|
|||
|
|
|
|
∆ |
|
|
|
2 |
|
|
|
|
|
|||
|
|
|
4 |
|
|
|
x2 |
|||||||||
|
|
|
∆ |
|
|
w |
|
F |
|
|
|
|||||
|
|
|
|
5 |
|
|
|
|
2 |
|
|
|
z2 |
|
||
|
|
|
∆6 |
|
θ2 |
M 2 |
||||||||||
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
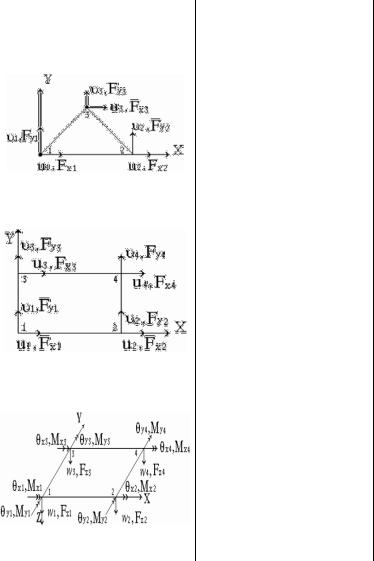
- двумерные, треугольной и четырехугольной формы, используемые для решения плоской задачи теории упругости и расчета пластин и оболочек (табл.1.2);
Таблица 1.2
Параметры двумерных конечных элементов
Тип |
Плоские элементы |
|
|
Узловые |
|
|
|
|
|
|
|
Узловые силы |
||||||||||
|
перемещения |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
∆1 |
|
u1 |
|
|
|
Fx1 |
|
||||||||||
|
|
|
|
|
∆ |
|
v |
|
|
|
F |
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
y1 |
|
|||||
|
|
|
|
|
|
∆ |
|
|
|
|
|
|
|
|
F |
|
|
|||||
ІV |
|
|
|
{∆}= |
|
|
|
u |
|
|
|
{F}= |
|
|||||||||
|
|
|
|
3 |
= |
v |
2 |
|
|
x2 |
|
|||||||||||
|
|
|
|
|
|
∆ |
|
|
2 |
|
|
|
|
F |
|
|
||||||
|
|
|
|
|
|
4 |
|
|
|
|
y2 |
|||||||||||
|
|
|
|
|
∆ |
|
u |
|
|
|
F |
|
|
|||||||||
|
|
|
|
|
|
|
5 |
|
|
|
|
3 |
|
|
|
|
x3 |
|
||||
|
|
|
|
|
|
Д |
|
|
|
F |
|
|
||||||||||
|
|
|
|
|
|
∆ |
|
|
v |
3 |
|
|
|
|
||||||||
|
|
|
|
|
|
6 |
|
|
|
|
|
y3 |
|
|||||||||
|
|
|
|
|
|
∆1 |
|
|
u1 |
|
Fx1 |
|||||||||||
|
|
|
|
А |
|
И |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
{∆} |
∆2 |
|
v1 |
|
|
Fy1 |
|
|||||||||||
V |
|
б |
|
3 |
|
|
|
|
|
2 |
|
{F} |
|
x2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fy4 |
||||||
|
|
|
|
|
∆8 |
|
v4 |
|
||||||||||||||
|
и |
|
∆1 |
|
|
|
w1 |
|
|
|
Fz1 |
|
||||||||||
|
|
|
∆2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
θx1 |
|
M x1 |
||||||||||||||
VІ |
|
|
∆ |
|
|
= |
θ |
|
|
|
{F}= |
M |
|
|
||||||||
С |
|
|
{∆}= |
|
3 |
|
|
|
|
|
y1 |
|
|
F |
y1 |
|||||||
|
|
|
|
|
∆ |
|
|
|
|
w |
|
|
|
|
|
|
||||||
|
|
|
|
|
4 |
|
|
|
|
2 |
|
|
z2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
∆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
θ |
|
|
|
|
M |
|
|
||||||
|
|
|
|
|
|
12 |
|
|
|
|
y4 |
|
|
|
y4 |
|||||||
- трёхмерные, объёмные, или пространственные, используемые для расчета сложных пространственных конструкций и массивных тел (табл. 1.3).
9
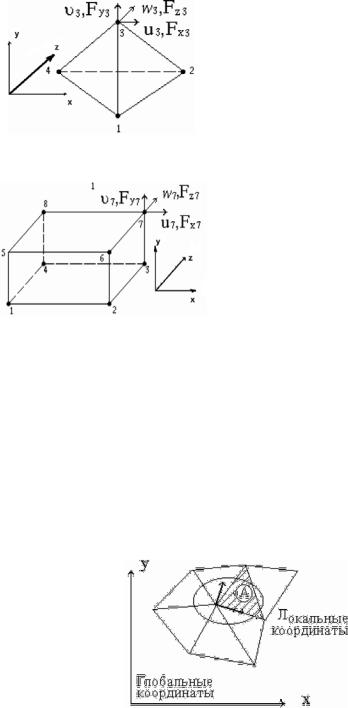
Таблица 1.3
Параметры трехмерных конечных элементов
Тип |
Объемные элементы |
|
Узловые |
|
|
|
|
Узловые силы |
||||||
|
перемещения |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
∆1 |
|
|
u1 |
|
Fx1 |
|
||||
|
|
|
|
|
∆ |
|
|
v |
|
|
F |
|
||
|
|
|
|
|
2 |
|
|
|
1 |
|
|
y1 |
|
|
|
|
|
|
|
∆3 |
|
= |
|
|
|
|
|
|
|
VIІ |
|
|
{∆}= |
|
w1 |
|
{F}= Fz1 |
|
||||||
|
|
|
|
|
∆ |
|
|
|
u |
2 |
|
|
F |
|
|
|
|
|
4 |
|
|
x2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆12 |
|
|
w4 |
|
Fz4 |
|
||||
|
|
|
|
∆1 |
|
|
u1 |
|
Fx1 |
|
||||
|
|
|
|
|
∆ |
|
|
v |
|
F |
|
|||
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VIІІ |
|
|
|
Д |
|
|
|
|
{F}= Fz1 |
|
||||
|
|
{∆}= |
∆3 |
|
= w1 |
|||||||||
|
|
|
|
|
∆ |
|
|
|
u |
|
|
|
F |
|
|
|
|
|
|
4 |
|
|
|
|
2 |
|
|
x2 |
|
|
|
|
|
|
|
И |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
∆ |
|
|
w |
|
F |
|
||||
|
|
|
|
|
24 |
|
|
|
|
8 |
|
|
z8 |
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.4. С стемыАкоординат |
|
|
|
|
|
|
|||||||
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
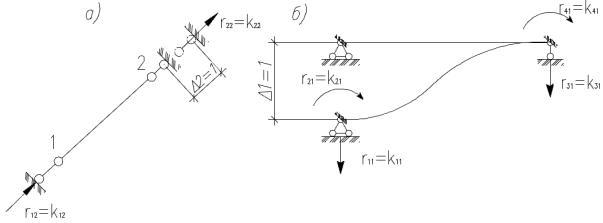
В методе конечных элементов используют две системы координат: локальную (местную) глобальную (общую) (рис. 1.3).
Локальные координаты применяют для описания отдельных элементов, глобальные – для описания всей конструкции.
Рис.1.3. Системы координатных осей
10
Если системы локальных и глобальных координат не совпадают, то переход от локальных к глобальным выполняется по формуле
{∆} = [J] {∆*}, |
(1.2) |
где {∆} – вектор узловых перемещений в глобальной системе координат; {∆*} – то же в локальной системе координат; [J] – матрица преобразования координат или матрица направляющих косинусов.
Проиллюстрируем применение формулы (1.2) на следующем примере. Рассмотрим стержневой элемент 1-2 фермы, представленной на рис. 1.4,а. В качестве локальных координат выберем коорди-
нату Х', направленную вдоль продольной оси стержня (рис. 1.4,б), в |
||||
качестве глобальных – координаты XY. |
И |
|||
|
||||
|
|
|
Д |
|
|
|
А |
|
|
|
б |
|
|
|
и |
|
|
|
|
С |
|
|
|
|
Рис. 1.4. Конструкция фермы (а) и конечный элемент 1-2 в местной X' и общей системахкоординат XY (б)
Обозначим перемещение узла 1 в локальной системе координат как u1'. Перемещение здесь одно, так как в данной системе координат в узле имеется одна степень свободы. Проецируя перемещение u1' на глобальные оси Х и Y, получим перемещения u1 и v1 в глобальной системе координат:
u1 |
= u1′cosα; |
(1.3) |
|
v1 = u1′sinα. |
|||
|
|||
|
11 |
|
|
Данные преобразования можно записать в матричном виде
(1.2):
u1 |
|
cosα |
|
|
v |
|
= sinα {u1′}, |
(1.4) |
|
1 |
|
|
|
|
где |
|
|
|
|
|
u |
|
|
cosα |
|
|
{∆}= v1 |
|
; |
[J ]= sinα |
; {∆*}={u1′}. |
|
1 |
|
|
|
|
|
1.5.Соотношения между узловыми силами
иперемещениями для элемента
Вкаждом конечном элементе узловые силы и узловые перемещения связаны между собой определеннымиИсоотношениями. При использовании метода сил эти соотношения называются уравнениями податливости, а при использованииДметода перемещений – уравнениями жесткости. В данном пособии будем рассматривать соот-Уравнения жесткости дляАстержневого элемента (тип I, табл.
1.1) имеют вид |
|
б |
|
|
|||
|
и |
|
|
|
|||
С |
F1 |
= k11 |
∆1 |
+ k12 ∆2; |
|
||
F2 |
= k21 |
∆1 |
+ k22 ∆2 . |
(1.5) |
|||
|
|
||||||
Коэффициенты k11, k12, k21, k22 называются коэффициентами жесткости элемента. Физический смысл коэффициента жесткости элемента заключается в следующем: коэффициент kij представляет реактивное усилие rij в дополнительно наложенной связи по направлению i-й степени свободы от единичного узлового перемещения
∆j = 1. При этом все остальные узловые перемещения должны быть |
||||||||
равны нулю. На рис. 1.5, |
а |
показаны |
такие реактивные |
усилия |
||||
r12 = k12, r22 = k22, вызванные перемещением ∆2 = 1. |
|
|||||||
Уравнения (1.5) можно представить в матричном виде |
|
|||||||
F1 |
|
k11 |
k12 |
∆1 |
|
(1.6) |
||
F |
= k |
|
k |
|
∆ |
|
||
2 |
|
|
21 |
|
22 |
2 |
|
|
|
|
|
|
12 |
|
|
|
|
или
{F }= [k ]{∆}, |
(1.7) |
где [k] – матрица жесткости элемента.
Рис. 1.5. Единичные состояния стержневого (а) |
|
||||||||||
|
|
|
|
|
Д |
|
|
|
|||
|
|
и балочного (б) элементов |
|
|
|
||||||
Уравнения жесткости для балочного элементаИ(тип II, табл. 1.1) |
|||||||||||
имеют вид |
|
б |
|
|
|
|
|
|
|
||
Fz1 |
|
+ k13w2 |
+ k14θ2; |
|
|
||||||
= k11w1 |
+ k12θ1 |
|
|
||||||||
и |
+ k θ |
+ k |
w |
+ k θ |
|
; |
|
||||
M |
1 |
= k |
w |
2 |
|
||||||
|
|
21 1А22 1 |
23 2 |
24 |
|
(1.8) |
|||||
Fz2 = k31w1 + k32θ1 + k33w2 + k34θ2; |
|
||||||||||
M2 = k41w1 + k42θ1 + k43w2 + k44θ2 |
|
||||||||||
или в матричном виде |
|
|
|
|
|
|
|
|
|
|
|
С |
{F }= [k ]{∆}, |
|
|
|
|
(1.9) |
|||||
где {F} и {∆} определяются выражениями для II типа КЭ из табл. 1.1, а матрица жесткости имеет вид
k |
k |
k |
k |
|
|
11 |
12 |
13 |
14 |
|
|
[k ]= k21 |
k22 |
k23 |
k24 . |
(1.10) |
|
k31 |
k32 |
k33 |
k34 |
|
|
|
k42 |
k43 |
|
|
|
k41 |
k44 |
|
|||
13
Физический смысл некоторых коэффициентов матрицы (1.10) ясен из рис. 1.5,б.
Уравнения жесткости для других конечных элементов записываются по аналогии.
1.6.Глобальные соотношения между узловыми силами
иперемещениями
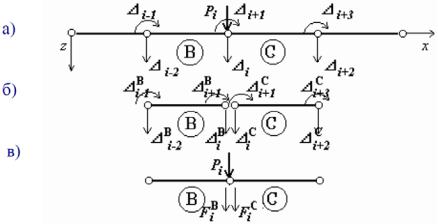
Рассмотрим балку, разбитую на конечные элементы. Выделим фрагмент, состоящий из конечных элементов B и C (рис. 1.6,a).
На фрагменте показаны узловые перемещения, соответствующие общей или глобальной нумерации степеней свободы конструкции. Элементы B и C имеют общую узловую точку, к которой приложена внешняя сила Pi в направлении степени свободы ∆i. Помимо
внешней силы Pi к заданному узлу приложены узловые силы F iB и
F iC , являющиеся силами межэлементного взаимодействия |
(рис. |
||||
1.6,в). |
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
А |
|
|
|
|
б |
|
|
|
|
и |
|
|
|
|
|
С |
|
|
|
|
|
Рис. 1.6. Перемещения и усилия в общей узловой точке |
|
||||
Из условия равновесия внутреннего узла можно записать |
|
||||
|
F B |
+ F C |
+ P = 0 . |
|
(1.11) |
|
i |
i |
i |
|
|
Узловые силы F iB и F Ci определяют из уравнений жесткости, записанных для элементов В и С (рис. 1.6,б):
14
F B = k B |
∆B |
+ k B ∆B |
+ k B ∆B |
+ k B |
∆B |
; |
|
||||||
i |
i,i−2 i−2 |
|
i,i−1 |
i−1 |
|
ii |
i |
i,i |
+1 i+1 |
|
(1.12) |
||
F C = kC ∆C + kC |
∆C |
+ kC |
|
∆C |
+ kC |
∆C |
. |
||||||
|
|
||||||||||||
i |
ii |
i |
i,i+1 i+1 |
|
i,i+2 |
|
i+2 |
i,i+3 i+3 |
|
|
|||
Для внутреннего узла, соединяющего элементы В и С, можно записать условия совместности перемещений:
|
|
|
|
∆B = ∆C |
= ∆ ; |
|
|
|
|
|
|
|
|||||
|
|
|
|
i |
|
|
i |
|
|
i |
|
|
|
|
|
|
(1.13) |
|
|
|
|
∆B |
= |
∆C |
|
= ∆ |
. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
i+1 |
|
|
i+1 |
|
i+1 |
|
|
|
|
|
|
|
|
Для остальных узловых перемещений, рассматриваемого |
|||||||||||||||||
фрагмента справедливы равенства |
|
|
|
И |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
∆B |
= ∆ |
; |
∆B |
= ∆ |
−1 |
; |
∆B |
|
= ∆ |
|
; |
∆B |
= ∆ |
. |
(1.14) |
||
i−2 |
i−2 |
|
i−1 |
i |
|
|
i+2 |
i+2 |
|
i+3 |
|
i+3 |
|
|
|||
Подстановка зависимостей (1.12) с учетом соотношений (1.13), (1.14) в выражение (1.11) приводит к глобальному уравнению жесткости, записанному для i- й степени свободы:
K |
|
|
|
+ K |
б |
|
+ P |
|
= 0. |
(1.15) |
|||
i,i−2 |
∆ |
i−2 |
i,i−1 |
∆ |
i−1 |
+ ... +ДK ∆ |
i |
||||||
|
|
|
|
|
i,i+3 i+3 |
|
|
|
|||||
|
|
|
|
и |
|
|
|
|
|
|
|||
Коэффициенты жесткостиАглобального уравнения состоят из |
|||||||||||||
локальных коэфф ц ентов жесткости конечных элементов, имею- |
|||
|
С |
|
|
щих общие степени свободы. Так, коэффициент жесткости Kii равен |
|||
сумме коэффициентов жесткости kiiB и kiiC |
конечных элементов В и |
||
С: |
|
Kii = kiiB + kiiC . |
(1.16) |
|
|
||
Уравнение (1.13) записано для i-ой степени свободы. Полное число степеней свободы всей конструкции примем равным m, при этом глобальная система уравнений жесткости должна содержать столько же уравнений.
В матричном виде глобальная система уравнений жесткости имеет вид
[К]{∆} + {P} = 0, |
(1.17) |
15