

формированных элементов, а в случае несовместных – нелинейными, при этом между границами соседних элементов появляется зазор (заштрихованная область на рис. 2.3,б). В идеале элементы должны быть совместными не только по перемещениям, но и по деформациям и напряжениям, но добиться этого значительно сложнее.
2.3. Механический смысл коэффициентов жесткости
Прежде чем определять коэффициенты жесткости балочного элемента, выясним их механический смысл. Для этого рассмотрим балочный элемент с наложенными по направлению всех степеней свободы дополнительными связями. По направлению первой степени
свободы зададим единичное перемещение ∆1 |
= 1 (рис. 2.4,а). При |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
||||
этом векторы узловых перемещений и узловых сил принимают вид |
|||||||||||||||||
|
|
|
|
|
|
|
Д |
|
|
|
|
||||||
|
|
|
1 |
|
|
|
|
|
|
|
r |
|
|
|
|
||
{∆ |
}= |
|
|
|
{F } |
|
11 |
|
|
|
|||||||
0 ; |
|
= |
r21 |
. |
|
(2.8) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
r31 |
|
|
|
|||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
0 |
|
|
|
|
|
|
|
r |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
41 |
|
|
|
||
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Подставим данные соотношения в уравнения жесткости (1.7): |
|||||||||||||||||
и |
k11 |
k12 |
|
k13 |
k14 1 |
|
|||||||||||
r11 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r21 |
= |
k21 |
k22 |
|
k23 |
k24 0 . |
(2.9) |
||||||||||
|
|
|
k31 |
k32 |
|
k33 |
|
|
|
|
|
||||||
r31 |
|
|
k34 0 |
|
|||||||||||||
r |
|
k |
41 |
k |
42 |
|
k |
43 |
k |
|
0 |
|
|||||
|
41 |
|
|
|
|
|
|
|
44 |
|
|
||||||
После умноженияС |
вектора узловых перемещений на матрицу |
||||||||||||||||
жесткости получим |
|
|
r |
|
|
k |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
11 |
|
|
|
|
11 |
|
|
|
|
|
|
||
|
|
|
r21 |
|
= |
k |
21 |
|
|
|
|
|
(2.10) |
||||
|
|
|
|
r |
|
|
k |
|
|
. |
|
|
|
|
|||
|
|
|
|
|
|
|
31 |
|
|
|
|
|
|
||||
|
|
|
31 |
|
|
|
|
|
|
|
|||||||
|
|
|
r |
|
|
k |
41 |
|
|
|
|
|
|
||||
|
|
|
|
41 |
|
|
|
|
|
|
|
|
|
|
|||
Полученное равенство позволяет объяснить механический смысл коэффициентов жесткости, которые по существу являются ре-
22
акциями в дополнительно наложенных связях в основной системе метода перемещений:
kij = rij . |
(2.11) |
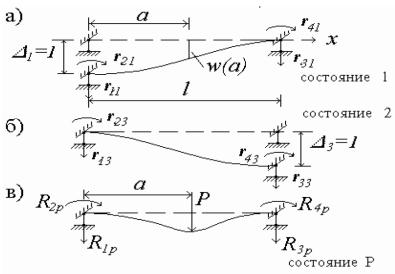
Рис. 2.4. Единичные (аД, б) и грузовоеИ(в) состояния балочного элемента
от единичного перемещенияб∆jА= 1. Каждый j-й столбец матрицы жесткости составлен из единичных реакций, соответствующих j-му единичному состоян ю элемента. Коэффициенты жесткости, представленные в выражен (2.7), соответствуют первому единичному со-
Каждый коэффициент kij представляет собой реакцию rij в дополнительно наложенной связи по направлению i-й степени свободы
стоянию балочного элемента, вызванному единичным перемещением |
|
∆1= 1. |
и |
Механический смысл коэффициентов жесткости других типов |
|
элементов тот же самый, что и балочного конечного элемента. |
|
|
С |
2.4. Определение коэффициентов жесткости из принципа возможных перемещений
Рассмотрим два единичных состояния балочного элемента: состояние 1 (рис. 2.4,а) и состояние 3 (рис. 2.4,б). Состояние 1 примем за действительное, а состояние 3 – за возможное. Рассмотрим работу внешних и внутренних сил первого состояния на возможных перемещениях третьего состояния.
23
К внешним силам первого состояния относятся реактивные силы r11, r21, r31, r41. Они совершают работу на возможных узловых перемещениях ∆1, ∆2, ∆3, ∆4 третьего состояния. Но в третьем единичном состоянии ненулевым является только одно перемещение ∆3=1, остальные узловые перемещения нулевые: ∆1=∆2=∆4=0. Таким образом, возможная работа А13 реактивных сил состояния 1 на перемещениях состояния 3 равна:
4
A13 = ∑rj1∆j = r31∆3 = r31 . (2.12) j=1
Возможная работа внутренних сил состояния 1 на перемещениях состояния 3 определяется из выражения:
l |
И |
|
|
A13 = ∫M1dϕ3 , |
(2.13) |
||
|
|||
0 |
|
|
где М1 – изгибающий момент в балочном элементе в первом единичном
состоянии; dϕ3 |
– угловое перемещение (угол поворота поперечного сечения |
|
А |
балки) в третьем единичном состоянии. При использовании выражения |
|
(2.13) необходимо помнить, что если рассматривать возможную работу |
||||||||||
внутренних сил в процессе нагруженияДбалки, то знак правой части |
||||||||||
выражения (2.13) должен ыть «минус», |
если в процессе разгрузки – то |
|||||||||
«плюс». |
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Используя выражен е |
|
|
|
|
|
|
|
|
||
|
С |
бM |
3 |
dx |
|
|
||||
|
|
dϕ3 |
= |
|
|
|
|
, |
(2.14) |
|
|
|
|
EJ |
|||||||
|
|
|
|
|
|
|
||||
равенство (2.13) можно представить в виде |
|
|||||||||
|
|
A13 |
= ∫ M1M3dx . |
(2.15) |
||||||
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
0 |
|
EJ |
|
|||
Из курса сопротивления материалов известна зависимость между изгибающим моментом Ми кривизной балкиρ при чистом изгибе:
M = −EJρ . |
(2.16) |
Кривизну балки ρ заменяем второй производной функции прогибов ρ = w″. С учетом этой замены получим
24
M = −EJw . |
(2.17) |
′′ |
|
Обозначим функцию прогибов в первом и третьем единичных состояниях как w1 и w3. Тогда вторые производные этих функций будут соответственно w″1 и w″3, а выражение (2.17), записанное для первого и третьего единичных состояний, примет вид
M1 = −EJw1′′ |
(2.18) |
|
и |
|
|
M3 = −EJw3′′ . |
(2.19) |
|
Подставляя соотношения (2.18) и (2.19) в (2.15), получим |
|
|
l |
И |
|
A13 = ∫ |
EJ w1"w3"dx . |
(2.20) |
0 |
|
|
Чтобы получить выражение второй производной функции про- |
||
гибов w″, необходимо дважды продифференцировать по x выражение |
|||||||||||||||||
(2.2): |
|
б |
Д |
|
|
|
|
||||||||||
|
и |
N |
|
+ ∆ |
N |
|
+ ∆ N |
|
+ ∆ |
N |
|
, |
(2.21) |
||||
|
w (x)= ∆ |
′′ |
′′ |
′′ |
′′ |
||||||||||||
|
′′ |
|
1 |
|
|
|
|
|
|
|
|
|
|
||||
где |
|
|
|
1А2 2 |
3 3 4 |
|
4 |
|
|
||||||||
С |
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2ξ |
−1); |
|
|
|
|
|
|||||
|
N1′′= − N3′′ = |
|
|
|
|
|
|||||||||||
|
l2 |
|
|
|
|
|
|||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N2′′ = |
(3ξ − 2); |
|
|
|
|
|
|
|
(2.22) |
|||||||
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N4′′ = |
2 |
(3ξ −1). |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя в (2.21) узловые перемещения первого единичного состояния ∆1 = 1, ∆2 = ∆3 = ∆4= 0 и третьего единичного состояния
∆3 = 1, ∆1 = ∆2= ∆4 =0, получим
w1′′= N1′′; w3′′ = N3′′. |
(2.23) |
Принцип возможной работы в форме принципа возможных перемещений или вариационный принцип Лагранжа формулируется
25
так: если элемент твердого деформируемого тела находится в равновесии, то полная работа всех приложенных к нему сил на возможных перемещениях равна нулю. Следовательно, полная работа всех внешних и внутренних сил состояния 1 на возможных перемещениях состояния 3 должна быть равна нулю. При этом знак возможной работы внутренних сил берем «минус», так как рассматриваем процесс нагружения балки.
Из выражения (2.20) с учетом (2.12), (2.11) и (2.23) получим выражение для вычисления коэффициента жесткости k13:
l |
|
k13 = ∫EJ N1" N3"dx . |
(2.24) |
0 |
|
После подстановки в подынтегральное выражение (2.24) зави- |
|||||||||
симостей для N1" и N3" из (2.22) и последующего интегрирования по- |
|||||||||
лучим |
|
|
|
|
|
Д |
|
||
|
|
|
|
А |
|
||||
|
|
|
|
k13 |
|
|
12EJ И |
|
|
|
|
|
|
= − |
l3 |
. |
(2.25) |
||
|
|
б |
|
|
|
|
|||
По аналогии с формулой (2.24) запишем выражение для произ- |
|||||||||
|
и |
|
|
|
|
|
|
||
вольного коэффициента kij |
|
алочного элемента постоянной жестко- |
|||||||
сти EJ: |
С |
|
|
|
|
|
|
|
|
|
|
kij = |
l |
EJ Ni" N "j dx . |
(2.26) |
||||
|
|
|
∫ |
||||||
|
|
|
|
|
0 |
|
|
|
|
При вычислении интегралов в формулах (2.24) и (2.26) необходимо произвести замену переменной интегрирования dx на dξ и пределов интегрирования [0, l] на [0,1]. При этом должно быть учтено равенство dx=ldξ .
Если в формуле (2.26) индексы i, j поменять местами, то результат не изменится. Это свидетельствует о том, что коэффициенты
жесткости обладают свойством взаимности: |
|
ki j = k ji , |
(2.27) |
а матрица жесткости симметрична относительно главной диагонали.
26