

3.2.2 Выбор корректирующего звена
ЛАХ корректирующего звена строится путем вычитания ординат ЛАХ исходной системы из ординат желаемой ЛАХ. При этом необходимо учесть, что применяться будет пассивное корректирующее звено и, следовательно, его статический коэффициент передачи не может быть больше 1. Поэтому разностная ЛАХ смещается вниз таким образом, чтобы ее высокочастотный горизонтальный участок совпал бы с осью 0 дб. В результате получается логарифмическая характеристика корректирующего звена. Все построения показаны на чертеже КР-2068.998-26-08-00.00.000.Д2.
По виду ЛАХ корректирующего звена можно определить его передаточную функцию, как:
Кк=10(-Lк/20)=0.25 (67)
На частоте происходит излом характеристики на +20 Дб/дек, что соответствует форсирующему звену с постоянной времени [1]:
T1=1/ =0.091
(68)
=0.091
(68)
Вторичный излом характеристики на -20 Дб/дек, происходит на частоте, что соответствует инерционному звену с постоянной времени [1] :
T2=1/ =0.067
(69)
=0.067
(69)
Следующий излом характеристики на +20 Дб/дек, что соответствует форсирующему звену с постоянной времени [1]:
T3=1/ =0.05
(70)
=0.05
(70)
Последний излом характеристики на – 20 Дб/дек, что может быть достигнуто включением инерционного звена с постоянной времени [1]:
T4=1/ =0.017
(71)
=0.017
(71)
В результате перечисленных соображений получаем передаточную функцию корректирующего звена в следующем виде [1]:
Wk(p)=Kk
 (72)
(72)
Для реализации полученной функции в качестве корректирующего звена был выбран четырехполюсник, электрическая схема которого представлена на рисунке 16.

Рис. 16 Электрическая схема четырехполюсника
Параметры передаточной функции (71) связаны с параметрами четырехполюсника следующими зависимостями:
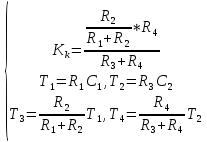 (73)
(73)
Используя систему (72) вычислим значения сопротивлений и емкостей четырехполюсника. При этом зададим значения по ряду Е-24 [4] C1=1,5мФ и С2=1,5мФ.
R1=60,7Ом,R2=74Ом,R3=44,7Ом,R4=15,2Ом [3]
Включение корректирующего звена осуществляется после предварительного усиления сигнала, перед объектом управления (рис.17)

Рис. 17. Включение корректирующего звена
где Wкз(р) - передаточная функция корректирующего звена.
3.2.3. Проверка результатов коррекции
Запас по фазе для скорректированной
системы:
 к=30.
к=30.
Запас по амплитуде для скорректированной системы: Lз=∞. Для построения графика переходного процесса используем, как и в предыдущем случае, численный метод решения дифференциального уравнения (72) с помощью программыMathCAD. Построенный переходный процесс представлен на рис. 18. По этому графику находим время переходного процесса в скорректированной системе:
tпп2= 0,21 с.
- Начальное время решения:

- Конечное время решения:

- Число точек решения:

- Вспомогательный индекс:

Функция для правых частей:
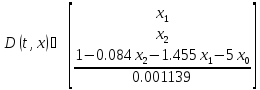 (74)
(74)
Решение дифференциального уравнения методом Рунге-Кутта:
 (75)
(75)
Конечный результат для вычисления переходного процесса:
 (76)
(76)

Рис.18. Переходной прочес с добавлением корректирующего звена
По причине подключения корректирующего звена коэффициент перерегулирования стал равным 0, и график переходного процесса стал иметь апериодический характер. Время переходного процесса стало равно 0,21 с. Добавление в систему корректирующего звена улучшает динамические характеристики системы в полтора раза, т.к. время переходного процесса до этого составляло 0,31 с.